СО
00
4
СО
Фиг
Изобретение относится к автоматизации техноло/ ических процессов в машино- и нри- поростроении и предназначено для испо.чь- лования в усгановках автоматической заг руз- ки дета.1ей типа колпачков.
Цел1. изобретения повышение надежности работы за счет обеспечения фиксации ио. южения дета.лей при их перемеп1е- нип.
На фи|. I изображено устройство, общий вид; на фиг. 2 - разрез А- А на фиг. 1.
Устройство содержит вращающийся от привода Рабочий диск 1 с радиальными вырезами 2, в каждом из которых размещен .1овите,1ь 3. На последнем установлен механизм зажима, выполненный в виде кле- пн вок) захвата 4, губки которого размещены относительно осп ловителя 3, при П()с;|едни(1 выступает за габариты губок. На K.ienteBbix захватах 4 расположены ролики 5, установленные в зоне окон 6, рас- по. юженных на рабочем диске 1 соосно радиальным вырезам 2. Вне рабочего диска 1 10 ося.м ввода и вывода детали закреплен 1 неподвижные копиры 7, установленные с возможностью взаимодействия с р().1иками 5 клещевых захватов 4. Неподвижные копиры 7 расположены симметрично относител1 но горизонтальной плоскости, проходящей через центр рабочего диска 1 и уста- нон. К ны с возможностью взаимодействия с р(|,1иками 5 к.чещевьгх захватов 4.
VcTpoiicTBo также содержит фотоэлектрп- ческиу датчик 8 для контроля наличия де- та.1и 9 в радиально.м вырезе 2, прием- Hbiii лоток 10 для приема сориентированных деталей, механизм 1 1 выталкивания для подачи детали 9 из радиального выреза 2 на прпемны лоток 10, подающий лоток 12 для подачи деталей 9 в радиальные вырезы 2.
VcTpoiicTBo работает следующим образом.
При повороте рабочего диска 1 на угол, соо1ветсгвук)щий глу расположения радиальных вырезов 2, ролики 5 одного из клещевых захватов 4 накатываются на неподвижные копиры 7, расположенные соосно с подающим лотком 12. При этом кле- 5 щевой захват 4 раскрывается и деталь 9 попадает в радиальный вырез 2, что контролируется фотоэлектрическим датчиком 8, после чего рабочий диск 1 снова совер- niaeT поворот на заданный угол. Если де.. таль 9 была подана в радиальный вырез 2 отверстием вперед, она отверстием заходит в ловитель 3 и при последующем повороте рабочего диска 1 ролики 5 клещевого захвата 4 скатываются с копиров 7, клещевой захват 4 закрывается и фиксирует де5 таль 9 в радиальном вырезе 2. Соосно с приемным лотком 10 также расположены неподвижные копиры 7, взаимодействуя с которыми роликами 5, клещевой захват 4 раскрывается и деталь 9 выталкивается на при- е.мный лоток 10 механизмом выталкивания.
0 Если же деталь 9 по подающему лотку 12 попадает в радиальный вырез 2 дном вперед, при повороте рабочего диска 1 клещевой захват 4 закроется, но не зафиксирует деталь 9, в результате чего при
5 повороте рабочего диска 1 последняя падает с рабочего диска 1 в какое-нибудь собирающее устройство, расположенное в зоне подающего лотка 12 под рабочим диском 1, например бункер (не показан).
30
Формула изобретения
Загрузочно-ориентирующее устройство, содержащее рабочий диск с радиальными вырезами, в каждом из которых размещены ловители, отличающееся тем, что, 5 с целью повыщения надежности работы, каждый ловитель снабжен механизмом зажима, выполненным в виде клещевого захвата, губки которого размещены симметрично относительно оси ловителя, -выступающего за габариты губок.
Л - 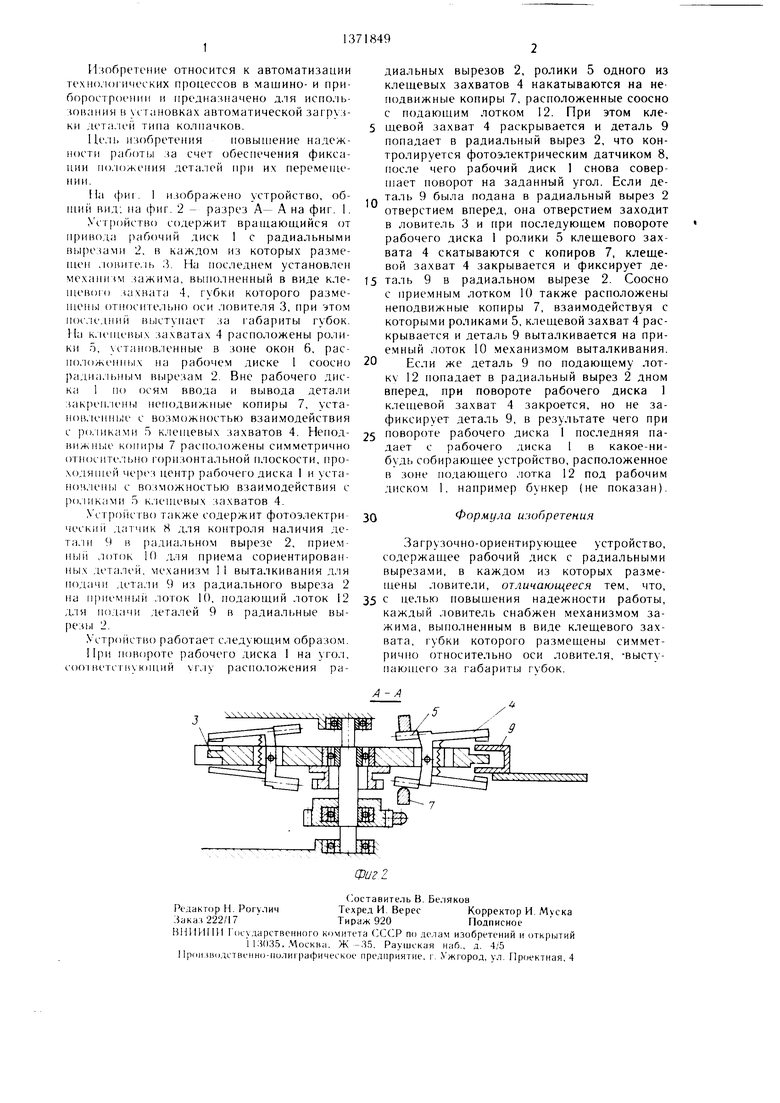
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство транспортного ротора | 1990 |
|
SU1717310A1 |
| Полосоподаватель | 1987 |
|
SU1447495A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |
| Устройство для загрузки деталей | 1991 |
|
SU1802779A3 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Устройство для ориентированной подачи деталей | 1987 |
|
SU1530410A1 |
| Установка для заполнения баллонов жидкой двуокисью углерода | 1980 |
|
SU859746A1 |
| Машина для разделки рыбы для консервов | 1938 |
|
SU59553A1 |
| Загрузочное устройство | 1988 |
|
SU1683962A1 |
| Роторный автомат питания | 1987 |
|
SU1468710A1 |
Изобретение относится к автоматизации технологически.х процессов в машино- и приборостроении и предназначено для использования в установках автоматической загрузки деталей типа колпачков. Цель изобретения - повышение надежности работы. Устройство выполнено в виде рабочего диска с радиальными вырезами 2, в каждом из которых размешен ловитель 3 с механизмом зажима, выполненным в виде клещевого захвата, губки которого размешены симметрично относительно оси ловителя 3, при этом последний выступает за габариты губок. Клешевой захват раскрывается за счет взаимодействия с неподвижными копирами, установленными в зоне подающего 12 и приемного 10 лотков. При подаче детали с подающего лотка 12 на ловитель 3 отверстием вперед она садится на ловитель 3, фиксируется клещевым захватом и переносится при повороте рабочего диска 1 на приемный лоток 10. При подаче же детали дном вперед она упирается в ловитель 3, но (лещевым захватом не фиксируется и при повороте рабочего диска 1 падает с ловителя 3. 2 ил. i (Л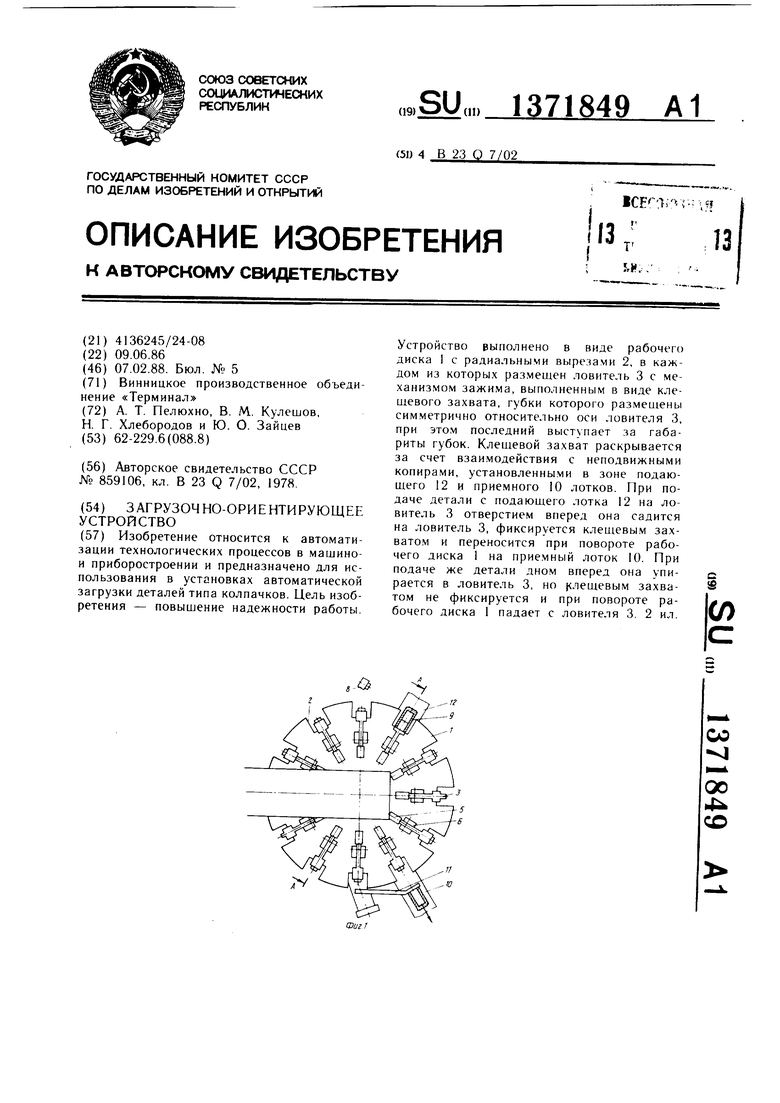
| Устройство для загрузки деталей | 1978 |
|
SU859106A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
