со
00
о
CD СО
11380937
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, и может быть использовано для загрузочно-разгру- зочных работ
Целью изобретения является расширение технологических возможностей за счет автоматической перенастройки
вокруг осей шарниров 8 и поворот рычагов А с захватными губками 6. Синхронизация движения рычагов 2 осуществляется за счет шестерен 9.
Движение рычагов 2 обеспечивает изменение размера зева между смежными губками 5 и 6. При разведении рычагов 2 происходит увеличение раз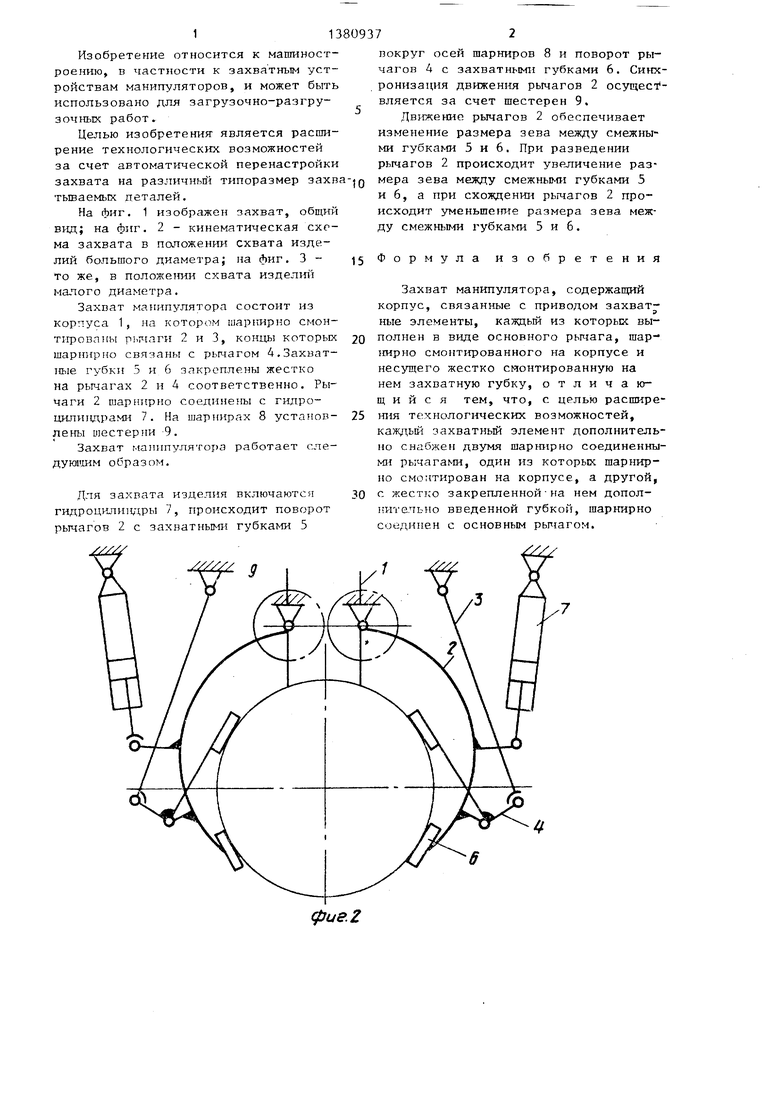
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват | 1983 |
|
SU1119842A1 |
| Захватное устройство манипулятора | 1987 |
|
SU1458222A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Схват манипулятора | 1986 |
|
SU1495118A1 |
| Схват манипулятора | 1991 |
|
SU1802792A3 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Схват робота | 1990 |
|
SU1761463A1 |

Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, и может быть использовано для загрузочно-погрузочных работ. Целью изобретения является расширение техио. гогических возможностей за счет автоматической перенастройки захвата на различный типоразмер захватываемых деталей. Захват манипулятора состоит из корпуса 1, на котором шарнирно смонтированы рычаги 2 и 3, концы которых шар- нирно соединены с рычагом 4. Захватные губки 5 жестко установлены на рычагах 2 и 4. Рычаги 2 шарнирно соединены с гидроцилиндрам 1 6, а на шарнирах 8 установлены шестерни 9 синхронизации движения рычагов 2.Движение рычагов 2 обеспечивает изменение зева между смежными губками 5. При их разведении зев увеличивается, а при схождении зев уменьшается. 3 ил. с (С (Л
захвата на различньш типоразмер захва-jQ мера зева между смежными губками 5
и 6, а при схождении рычагов 2 происходит уменьшение размера зева меж ду смежными губками 5 и 6.
тьгоаемых деталей.
На фиг. 1 изображен захват, общий вид; на фиг. 2 - кинематическая схг- ма захвата в папожении схвата изделий большого диаметра; на Лиг. 3 - то же, в положении схвата изделга малого диаметра.
Захват манипулятора состоит из корпуса 1, на котором шарнирно смон- Т1фованы рьиаги 2 и 3, концы которых шарнирно связаны с рычагом 4.Захватные губки 5 и 6 закреплены жестко на рычагах 2 и 4 соответственно. Рычаги 2 шарнирно соединены с гидроцилиндрами 7. На шарнирах 8 установ- 25 Ш1Я технологических возможностей.
лены шестерни 9.
Захват маштулятора работает следующим образом.
Для захвата изделия включаются гидроцилин/;ры 7, происходит поворот рычагов 2 с захватными гyбкa ш 5
фиг. 2
мера зева между смежными губками 5
и 6, а при схождении рычагов 2 происходит уменьшение размера зева между смежными губками 5 и 6.
Формула изобретения
Захват манипулятора, содержащий корпус, связанные с приводом захватные элементы, каждый из которых вы- полней в виде основного рычага, шар- irapHo смонтированного на корпусе и несущего жестко смонтированную на нем захватную губку, отличающийся тем, что, с целью расшире
каждый захватный элемент дополнительно снабжен двумя шарнирно соединенными рычагами, один из которых шарнирно смонтирован на корпусе, а другой, с жестт;о закрепленной на нем допол- ни 1 ельно введенной губкой, шарнирно соединен с основным рьпшгом.
| Схват | 1980 |
|
SU960009A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
