Изобретение относится к устройствам для транспортирования, в частности к транспортным механизмам гибких автоматизированных производств, и может быть использовано для передачи тарно-штучных грузов между двумя или несколькими перегрузочными местами, обслуживаемыми транспортными манипуляторами, и межоперационного ));1К(М1ления.
Целью изобретения является ювышеиие эффективности работы рольганга путем предотвращения повреждений изделий при их останове.
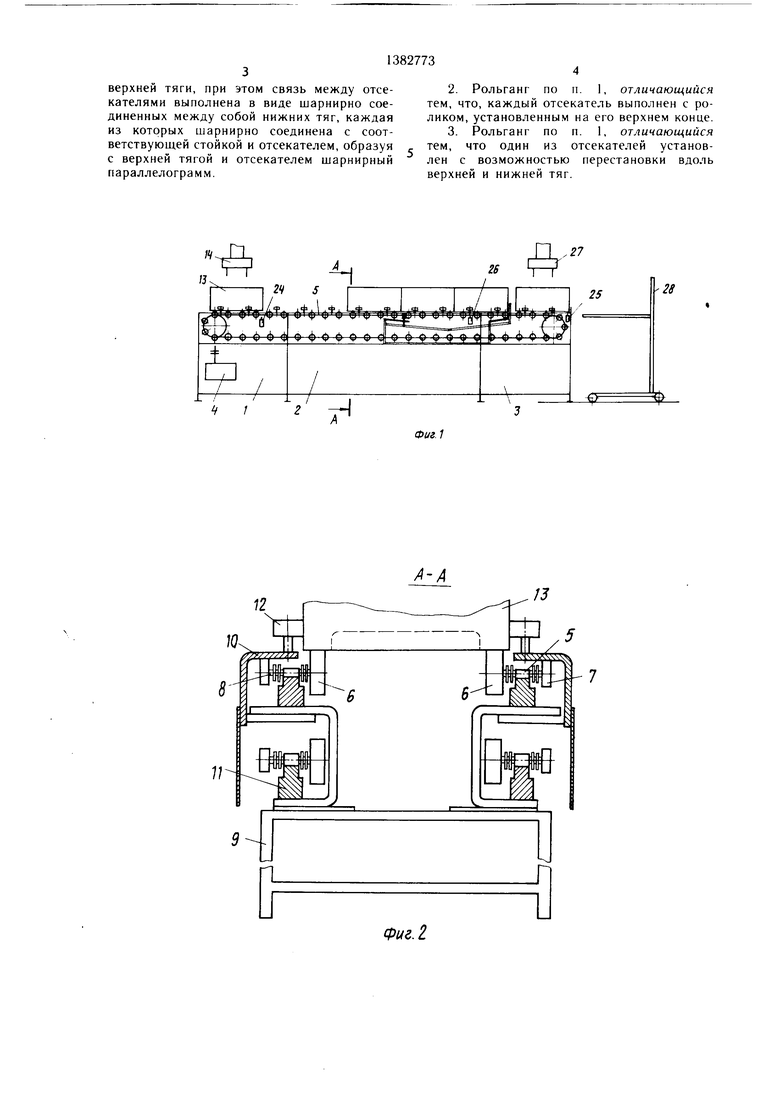
На фиг. 1 изображен рольганг вид сбоку, на фи|-. 2 сечение А--А на фиг. 1; на (иг. 3отсекатели в положении
ограничения перемещения грузов; на фиг . 4то же, в положении разделения потока грузов.
Рольганг включает головную 1, транс- нортно-накопительнук) 2, концевую 3 секции. В состав головной секции входит н)ивод 4.
Секции обьединены двумя вертикально- замкнутыми ценными контурами 5.
Рольганг соде)жит установленные на основании рузовые поворотные приводные катки 6 и катки 7, свободно установленные на оснх 8 с одной стороны цепи. Каждая секция включает основание 9 и два ipo- гона 10 с опорными направляющими 11 цепей 5. С двух сторон рольганга установлены ролики 12, центрирующие груз 13, устанавливаемый на рольганг ма)1ипулято- ром 14.
Ролыанг содержит два последовательно установ.менных с возможностью возвратно- поступательного перемещения в вертикальной нлоскости в противофазе и кинематически связанных между собой отсекателей 15 и К). Рольганг снабжен двумя вертикально установленными перед соответствующим отсекателем в направлении транспортирования груза стойками 17, при этом связь между отсекателями 15 и 16 выполнена в виде щарнирно соединенных между собой нижних тяг 18, каждая из которых щарнирно соединена с соответствующей стойкой 17 и итсекателями 15 и 16, а верхний конец каждой стойки 17 щарнирно соединен г соответствующим отсекателем посредством верхней тяги 19. При этом стойки 17 верхней и нижней тяг и отсекатели 15 и 16 образуют параллелограммы. Каждый отсекатель выполнен с роликом 20, устаношепиым на его верхнем конце. Один из отсекателей 16 установлен с возможностью перестановки вдоль верхних 19 и нижних 18 тяг, на которых выполнены установочные отверстия 2 и 22. Отсекатели снабжены приводным устройством 23. На входе рольганга установлен датчик 24 наличия груза на входе, на выходе рольганга установлен датчик 25 наличия груза на выходе, в зоне отсекателей установлен датчик 26 наличия грузов перед отсекателем 15. Датчики электрически соединены с программирующим устройством управления. Транспортный манипулятор 27 и штабелер 28 служат для съема и даль- нейщих манипуляций с грузами и в состав рольганга не входят.
Рольганг работает следующим образом.
При активизации датчика 24 наличия
груза на входе, т. е. при установке на
вход рольганга груза 13 с помощью, на0 пример, транспортного манипулятора 14
включается привод 4 цепей 5.
Перемещение отсекателя 15 происходит по дуге навстречу грузу с величиной радиуса, определяемого длиной верхней тяги 19, что позволяет предотвратить повреждение изделий при их останове.
Груз перемещается по рольгангу и останавливается.
Транспортирование следующего груза происходит аналогичным образом, при этом 0 каждый последующий груз упирается в пре дыдущий и происходит накопление. Так как катки 6 и 7 насажены на оси свободно, то цепь перемещается под грузами и катки 6 прокатываются по днипд.у тары (груза). При необходимости выдачи груза срабатывает привод 23, который утапливает отсекатель 15, а отсекатель 16 занимает рабочее положение и фиксирует груз стоящий над ним, при этом отсекает весь поток грузов, кроме тех, которые нахо0
дится в зоне отсекателей 15 и 16. Отсекатель 16 также перемещается по дуге навстречу грузу с величиной радиуса, определяемого длиной верхней тяги 19.
Эти грузы перемещаются в зону выдачи, где снимаются с рольганга манипулятором
г 27 или щтабелером 28. Груз, находясь на позиции выдачи, воздействует на датчик 25, сигнал с которого передает команду на отключение привода 4 цепей 5.
Таким образом, происходит учет грузов, находящихся на рольганге, и оптимальное
0 без холостых прогонов управлением им.
Формула изобретения
1. Рольганг, содержащий установленные на основании грузовые поворотные катки, привод катков, два последовательно установленных с возможностью возвратно-поступательного перемещения в вертикальной нлоскости в противофазе и кинематически
Q связанных между собой отсекателя и привод отсекателей, отличающийся тем, что, с целью повып1ения эффективности работы рольганга путем предотвращения повреждений изделий при их останове, он снабжен двумя вертикально установленными перед соответ5 ствующим отсекателем в направлении транспортирования груза стойками, верхний конец каждой из которых щарнирно соединен с соответствующим отсекателем посредством
верхней тяги, при этом связь между отсе- кателями выполнена в виде шарнирно соединенных между собой нижних тяг, каждая из которых шарнирно соединена с соответствующей стойкой и отсекателем, образуя с верхней тягой и отсекателем шарнирный параллелограмм.
2.Рольганг по п. I, отличающийся тем, что, каждый отсекатель выполнен с роликом, установленным на его верхнем конце.
3.Рольганг по п. 1, отличающийся тем, что один из отсекателей установлен с возможностью перестановки вдоль верхней и нижней тяг.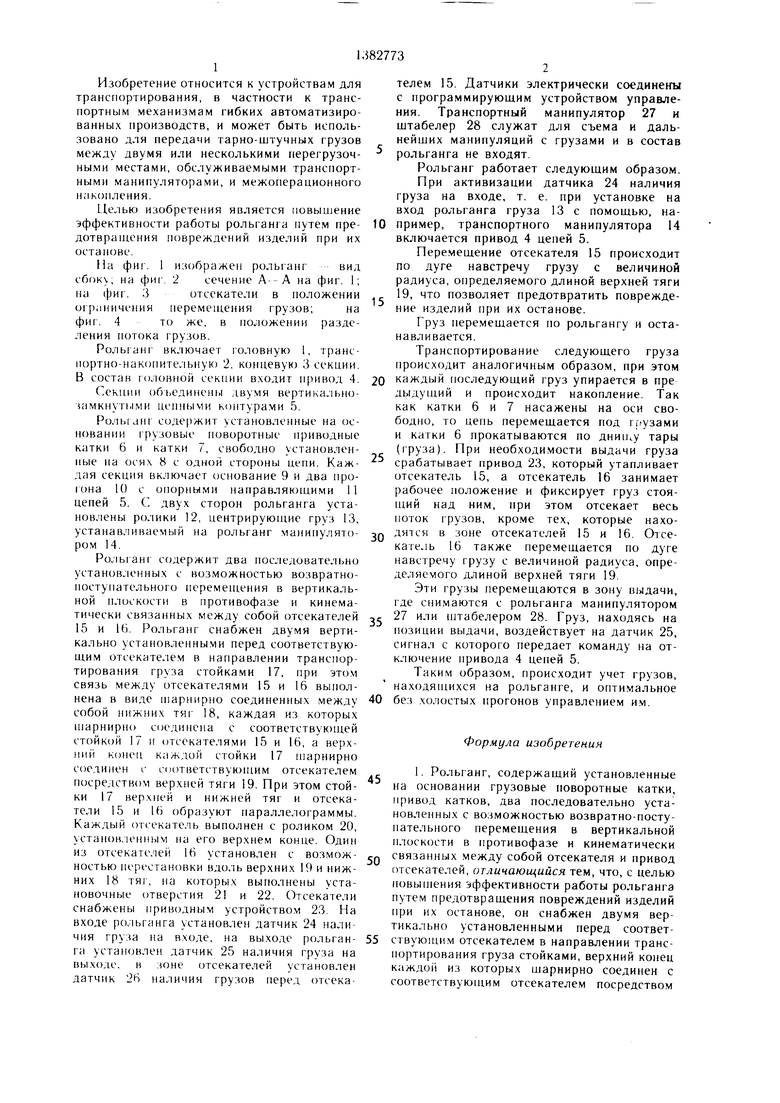
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования штучных грузов | 1976 |
|
SU658048A1 |
| Шаговый конвейер | 1983 |
|
SU1165620A1 |
| Перегружатель штучных грузов | 1982 |
|
SU1022876A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
| Автоматическая линия для механической обработки цилиндрических деталей | 1983 |
|
SU1135607A1 |
| Штанговый конвейер для перемещения штучных грузов | 1979 |
|
SU874519A1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| Роликовый конвейер | 1983 |
|
SU1126515A1 |
| Цепной конвейер | 1982 |
|
SU1016238A1 |
| Вертикальный конвейер | 1982 |
|
SU1077829A1 |
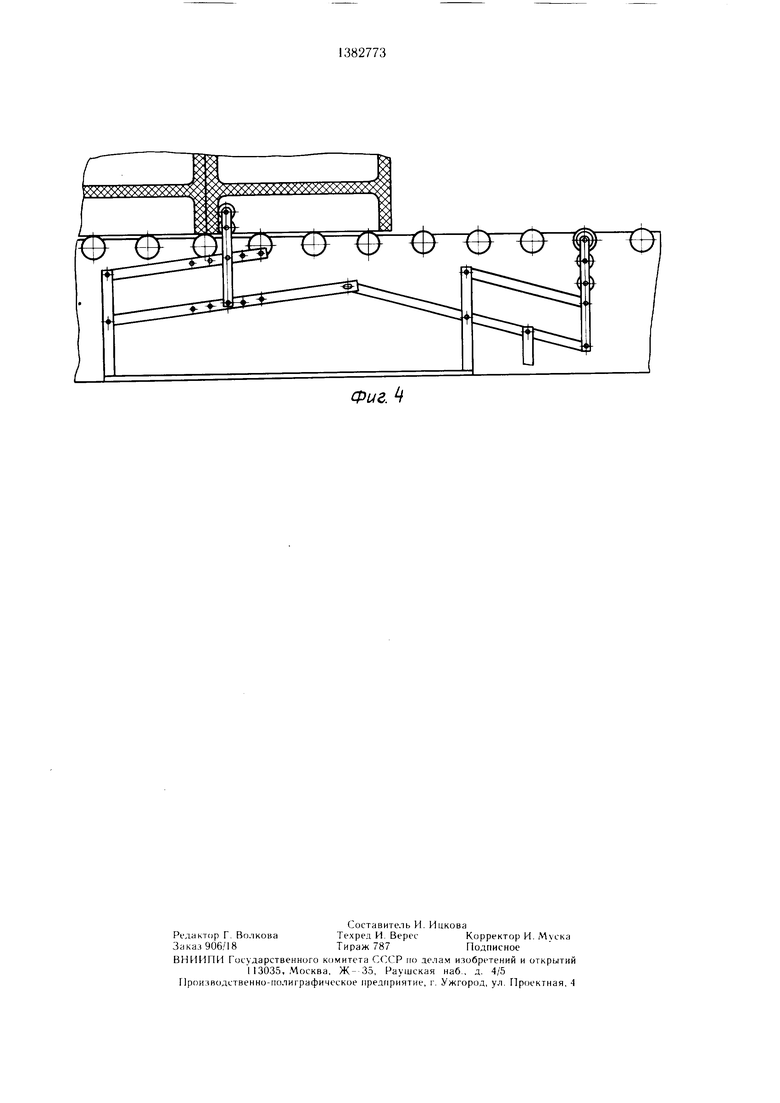
Изобретение относится к транспортированию и м. б. использовано для передачи тарно-штучных грузов между двумя или несколькими перегрузочными местами. Цель изобретения - повын1ение эффективности работы путем предотвращения повреждений изделий при их останове. Для этого рольганг снабжен двумя стойками 17, вертикально установленными перед соответствующим отсекателем в направлении транспортирования груза. Верхний конец каждой 17 9 18 Ю 22 21 стойки 17 шарнирно соединен с соответствующим отсекателем 15 и 16 посредством верхней тяги 19. Отсекатели 15 и 16 связаны друг с другом гнарнирно соединенными между собой нижними тягами 18. Каждая из них соединена с соответствующей стойкой 17 и отсекателями 15 и 16, образуя с ним и тягой 19 шарнирный параллелограмм. Отсекатели 15 и 16 имеют ролик 20, установленный соответственно на их верхнем конце. Отсекатель 16 установ лен с возможностью перестановки вдоль тяг 18 и 19. Отсекатель 15 перемещается навстречу грузу по дуге радиусом, определяемым длиной тяги 19, что позволяет предотвратить повреждение изделий при их останове. При необходимости выдачи груза привод утапливает отсекатель 15, а отсе- катель 16 занимает рабочее положение и фиксирует груз, стоящий под ним, отсекая весь ноток грузов, кроме находящихся в зоне отсекателей 15 и 16. Грузы перемещаются в зону выдачи, где снимаются с рольганга. Т. о. происходит учет грузов, находящихся на рольганге, и оптимальное (без холостых прогонов) управление им. 2 3. п. ф-лы, 4 ил. П J9 с (Л со 00 ю 00 23 8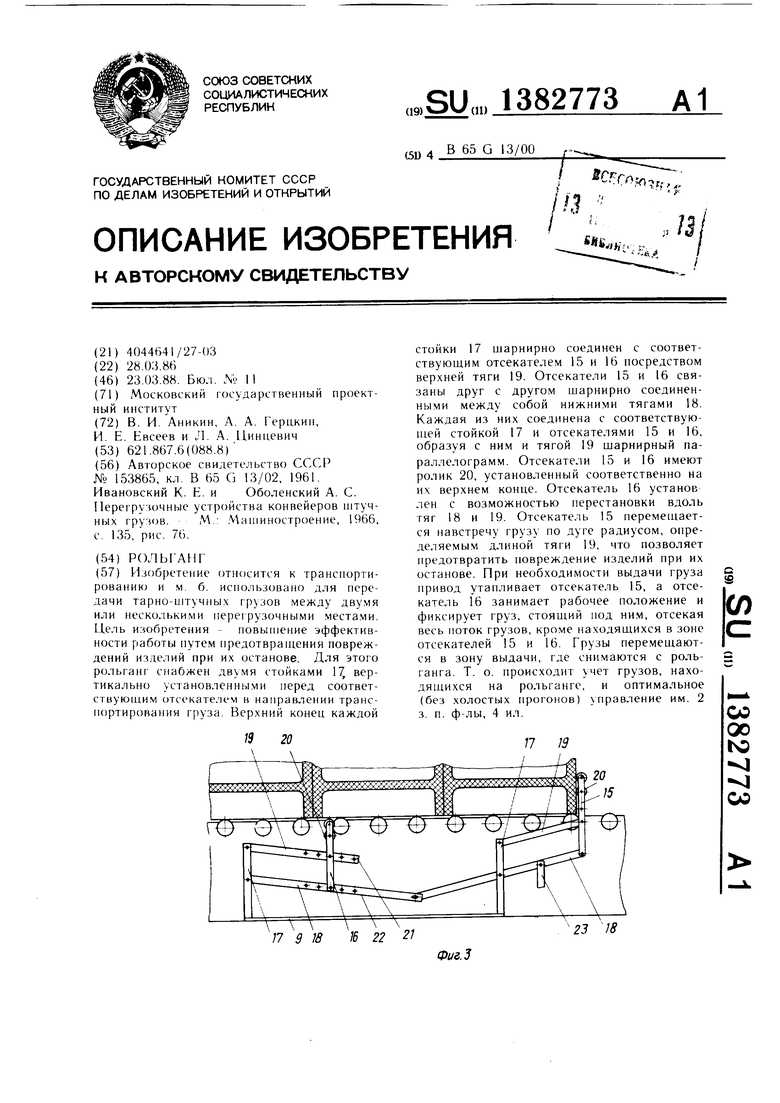
-Й
,27
2В
-7
Фиг. 2
Фиг.
| 0 |
|
SU153865A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Ивановский К | |||
| Н | |||
| и Оболенский А | |||
| С | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| . | |||
| Машиностроение, 1966, с | |||
| Способ обделки поверхностей приборов отопления с целью увеличения теплоотдачи | 1919 |
|
SU135A1 |
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
