У/7//АУ/Ж////А
22L
1 /
2 JSJB
сл
9
00
с эо
N)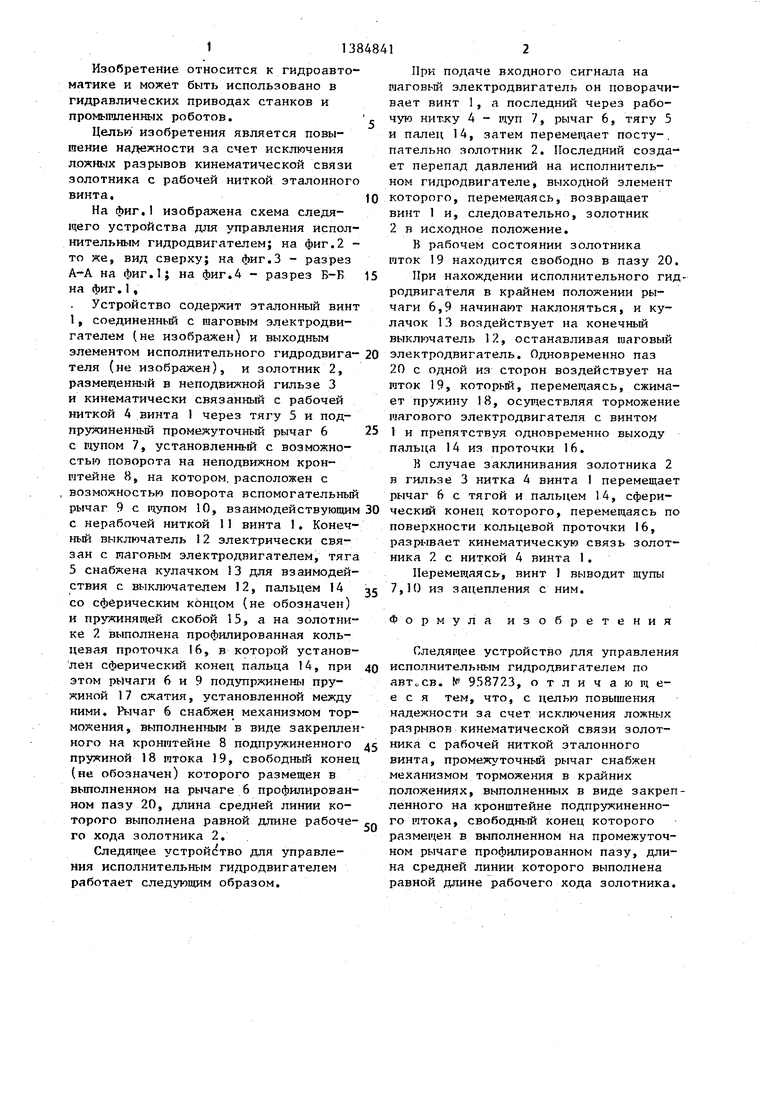
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящее устройство для управления исполнительным гидродвигателем | 1980 |
|
SU958723A1 |
| Гидравлический следящий привод | 1981 |
|
SU1015129A1 |
| Гидравлический следящий привод | 1987 |
|
SU1498982A1 |
| Гидравлический следящий привод | 1984 |
|
SU1224467A1 |
| Гидравлический следящий привод | 1982 |
|
SU1130049A1 |
| Гидравлический следящий привод | 1983 |
|
SU1086242A1 |
| Гидравлический следящий привод | 1987 |
|
SU1413305A1 |
| Гидравлический следящий привод | 1983 |
|
SU1253230A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО С ШАГОВЫМ ПРИВОДОМ | 1971 |
|
SU302501A1 |
| Гидравлический следящий привод | 1985 |
|
SU1285222A1 |
Изобретение относится к гидро- автоматике и позволяет повысить надежность устройства за счет исключения ложных разрывов кинематической связи золотника с рабочей ниткой эталонного винта. Рычаг 6 снабжен механизмом торможения, выполненным в виде закрепленного на кронштейне 8 подпружиненного пружиной 18 штока 19, свободный конец которого размещен в профилированном пазу 20 рычага. Дпина средней линии паза равна длине рабочего хода золотника 2. При нахождении исполнительного гидродвигателя в крайнем положении паз воздействует на гаток, который, перемещаясь, сжимает пружину, осуществляя торможение шагового электродвигателя с винтом. 4 ил.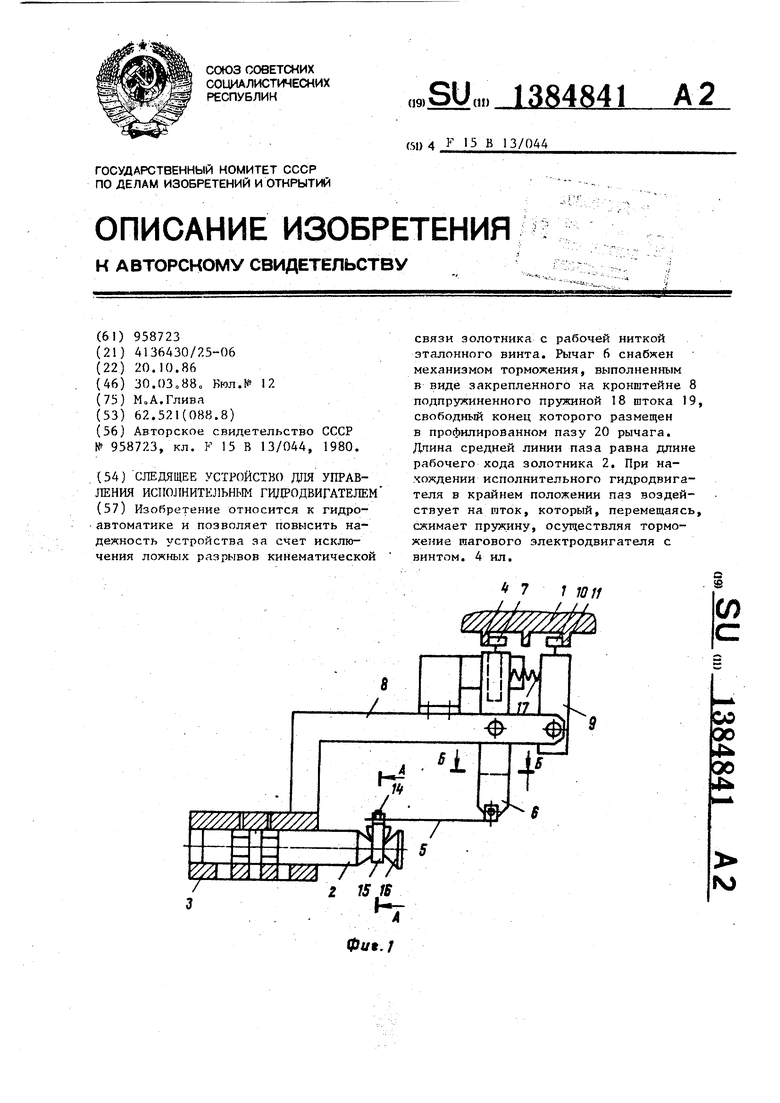
Фи9. J
Изобретение относится к гидроавтоматике и может быть использовано в гидравлических приводах станков и промьгашенных роботов.Целью изобретения является повышение надежности за счет исключения ложных разрывов кинематической связи золотника с рабочей ниткой эталонного винта,
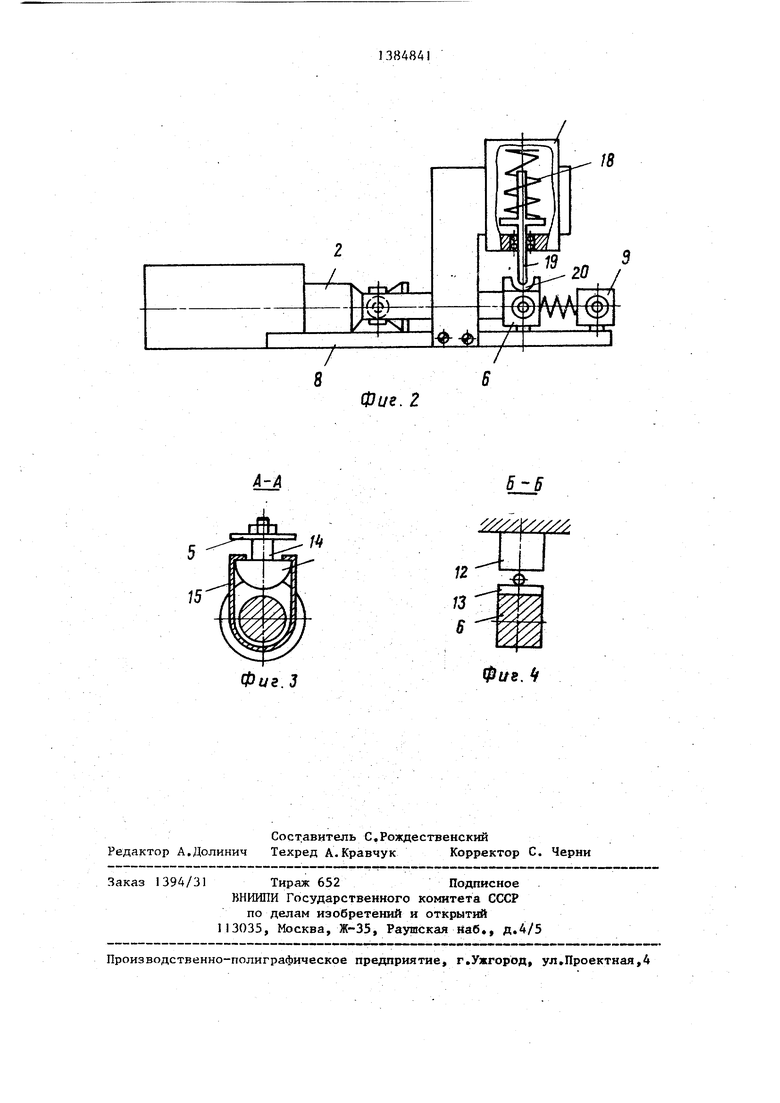
На фиг.1 изображена схема следящего устройства для управления исполнительным гидродвигателем; на фиг.2 - то же, вид сверху; на фиг.З - разрез А-А на фиг.1; на фиг.4 - разрез Б-Б на фиг.1,
Устройство содержит эталонный винт 1, соединенный с шаговым электродвигателем (не изображен) и выходньм элементом исполнительного гидродвига- теля (не изображен)5 и золотник 2, размещенный в неподвижной гильзе 3 и кинематически связанный с рабочей ниткой 4 винта 1 через тягу 5 и подпружиненный промежуточный рычаг 6 с щупом 7, установленный с возможностью поворота на неподвижном кронштейне 8, на котором, расположен с возможностью поворота вспомогательный рычаг 9 с щупом 10, взаимодействующим с нерабочей ниткой I1 винта 1. Конечный выключатель 12 электрически связан с шаговым электродвигателем, тяга 5 снабжена кулачком 13 для взаимодействия с выключателем 12, пальцем 14
со сферическим концом (не обозначен) и пружинящей скобой 15, а на золотнике 2 выполнена профилированная кольцевая проточка 16, в которой установлен сферический конец пальца 14, при этом рычаги 6 и 9 подупржинены пружиной 17 сжатия, установленной между ними. Рычаг 6 снабжен механизмом торможения, выполненным в виде закрепленного на кронштейне 8 подпружиненного пружиной 18 штока 19, свободньй конец (не обозначен) которого размещен в выполненном на рычаге 6 профилированном пазу 20, длина средней линии которого выполнена равной длине рабоче- го хода золотника 2.
Следящее устройство для управления исполнительным гидродвигателем работает следующим образом.
При подаче входного сигнала на шаговьш электродвигатель он поворачивает винт 1, а последний через рабочую нитчку 4 - щуп 7, рычаг 6, тягу 5 и палец 14, затем перемещает посту-, пательно золотник 2. Последний создает перепад давлений на исполнительном гидродвигателе, выходной элемент которого, перемещаясь, возвращает винт 1 и, следовательно, золотник 2 в исходное положение.
В рабочем состоянии золотника шток 19 находится свободно в пазу 20.
При нахождении исполнительного гид родвигателя в крайнем положении рычаги 6,9 начинают наклоняться, и кулачок 13 воздействует на конечный выключатель 12, останавливая шаговый электродвигатель. Одновременно паз 20 с одной из сторон воздействует на иток 19, который, перемещаясь, сжимает пружину 18, осуществляя торможение luaroBoro электродвигателя с винтом 1 и препятствуя одновременно выходу пальца 14 из проточки 16.
В случае заклинивания золотника 2 в гильзе 3 нитка 4 винта 1 перемещает рычаг 6 с тягой и пальцем 14, сферический конец которого, перемещаясь по поверхности кольцевой проточки 16, разр1 Юает кинематическую связь золотника 2 с ниткой 4 винта 1.
Перемещаясь, винт 1 выводит щупы 7,10 из зацепления с ним.
Ф о рмула изобретения
Следящее устройство для управления исполнительным гидродвигателем по авт„св. № 958723, отличающееся тем, что, с целью повышения надежности за счет исключения ложных разрывов кинематической связи золотника с рабочей ниткой эталонного винта, промежуточный рычаг снабжен механизмом торможения в крайних положениях, выполненных в виде закрепленного на кронштейне подпружиненного штока, свободный конец которого размещен в выполненном на промежуточном рычаге профилированном пазу, длина средней линии которого выполнена равной длине рабочего хода золотника.
86
Фиг. 2
А-А
11
Фиг.З
5-6
/У7Х////7
12
13 6
Фие. V
| Следящее устройство для управления исполнительным гидродвигателем | 1980 |
|
SU958723A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
