Изобретение относится к гидроавтоматике и может быть использовано в гидросистемах станков с числовым программным управлением и промышленных роботов.
Цель изобретения - повышение надежности и упрошение конструкции.
На фиг. 1 изображена схема гидравлического следяш,его привода; на фиг. 2 - разрез А-А на фиг. 1.
Привод содержит гидродвигатель 1, золотник 2, гидравлически связанный с гидродвигателем 1, задатчик 3, эталонный винт 4, связанный с валом 5 задатчика 3, основной рычаг б с щупом 7 и подпружиненный пружино.й 8 сжатия поворотный вспомогательный рычаг 9 с щупом 10.
Рычаги 6 и 9 закреплены последовательно на одной стороне оси 11 и опираются на витки 12 и 13 эталонного винта 4, ось 11 связана с золотником 2 кинематической цепью (не обозначена), включающей пружинную тягу 14 и предохранительную муфту 15, выполненную в виде втулки 16 с канавкой 17 и установленного на тяге 14 профилированного пальца 18, закрепленного пружинным элементом 19 в канавке 17.
Ось 11 снабжена жестким упором 20, установленным с возможностью взаимодействия с рычагом 9, выполненным двуплечим, при этом пружина 8 размещена между свободным плечом (не обозначено) рычага 9 и упором 20. На оси 11 установлен кулачок 21 для взаимодействия с конечным выключателем 22.
Гидравлический следящий привод работает следующим образом.
При подаче входного сигнала задатчик 3 поворачивает вал 5 и винт 4, виток 12 которого воздействует через щуп 7 и рычаг 6 на ось 11. При этом пружиной 8 выбираются зазоры между витками 12 и 13 и щупами 7 и 10, ось 11
А- А
0
перемещается прямолинейно, и тяга 14 перемещает золотник 2, формирующий перепад давлений на гидродвигателе 1.
При вращении гидродвигателя 1 ось 11 5 поворачивается, а щупы 7 и 10, перемещаясь по виткам 12 и 13, перемещают ось 11 и золотник 2 в исходное положение. В случае заклинивания золотника 2 палец 18 отжимает элемент 19 и разрывает кинематическую цепь между винтом 4 и золотником 2. Ось 11 продолжает поворачиваться, а виток 13 - воздействовать на щуп 10 и рычаг 9, последний, повернувшись, опирается на упор 20, исключая из работы пружину 8. При даль. нейшем перемещении щупы 7 и 10 выводятся из зацепления с винтом 4, а кулачок 21 воздействует на конечный выключатель 22 для отключения привода.
Выполнение рычага 9 двуплечим позволяет исключить непосредственное воздейст0 вие пружины 8 на рычаг 6 и шуп 7, упрощает подбор пружины 8 по усилию, так как ее усилие можно изменять при изменении соотношения плеч рычага 9, улучшает компоновочные возможности в связи с тем, что пружину 8 не требуется размещать в ограниченном пространстве между витками 12 и 13. щупами 7 и 10 и осью 11. Кроме того, учитывая, что при разрыве кинематической цепи рычаг 9 имеет возможность опираться на упор 20,
- усилие пружины 8, необходимое для выборки зазоров, выбирается только из условия преодоления тренг я золотника 2 в . рабочем режиме (без учета усилия пружинного элемента 19). Таким образом снижается вероятность поломки при деформации щупов 7 и 10 и витков 12 и 13. Предлагаемое изобретение в гидросистемах станков и промышленных роботов позволяет повысить их надежность, упростить конструкцию и тем самым повысить эффективность их использования.
5
i8
фиг.2
ВНИИПИЗаказ 1905/31
Тираж 610Подписное
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4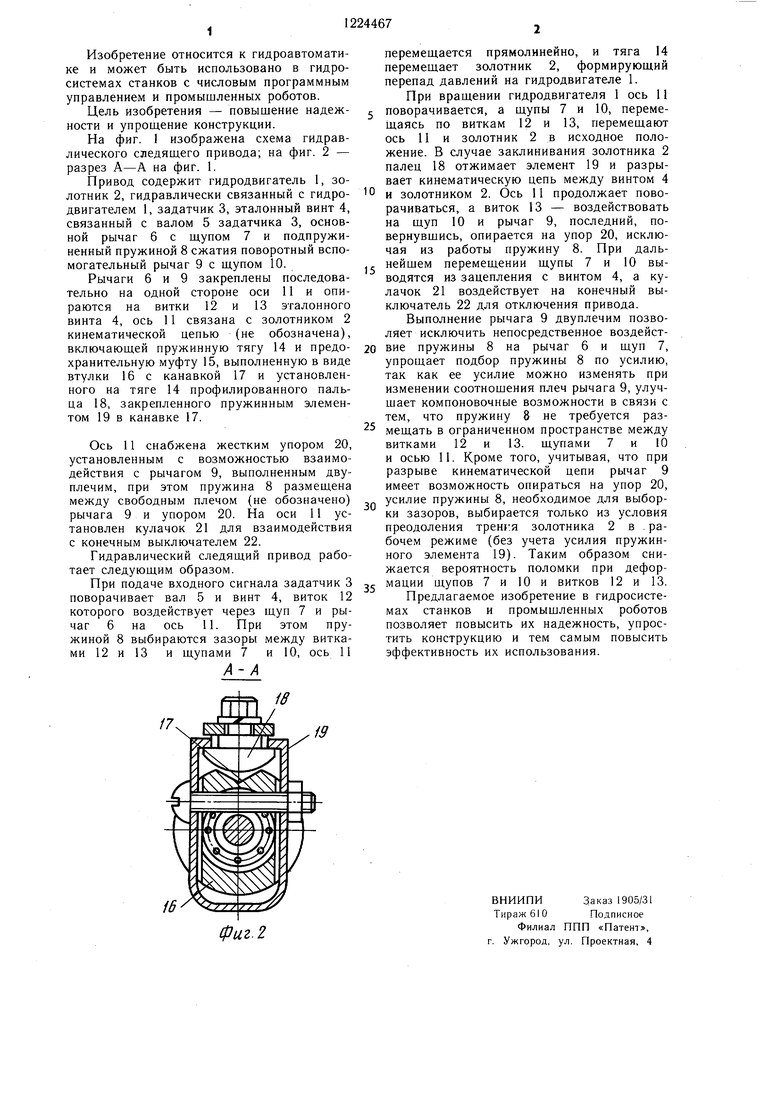
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический следящий привод | 1983 |
|
SU1086242A1 |
| Гидравлический следящий привод | 1982 |
|
SU1130049A1 |
| Гидравлический следящий привод | 1987 |
|
SU1413305A1 |
| Гидравлический следящий привод | 1983 |
|
SU1253230A2 |
| Гидравлический следящий привод | 1981 |
|
SU1015129A1 |
| Гидравлический следящий привод | 1985 |
|
SU1285222A1 |
| АВТОМАТ ДЛЯ ГОРЯЧЕЙ НАВИВКИ ПРУЖИН | 1967 |
|
SU202062A1 |
| ПОЛУАВТОМАТ ДЛЯ ШЛИФОВАНИЯ СОПРЯЖЕНИЯ ПЕРА С ЗАМКОМ ЛОПАТОК ТУРБИН | 1966 |
|
SU215756A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| Механизм для копирования рельефа поля жаткой комбайна | 1989 |
|
SU1794370A1 |

| Следящее устройство для управления исполнительным гидродвигателем | 1980 |
|
SU958723A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Гидравлический следящий привод | 1981 |
|
SU1015129A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
