2
25 8
9 W
J7 3 .35 73
(Л
LL
со со о ел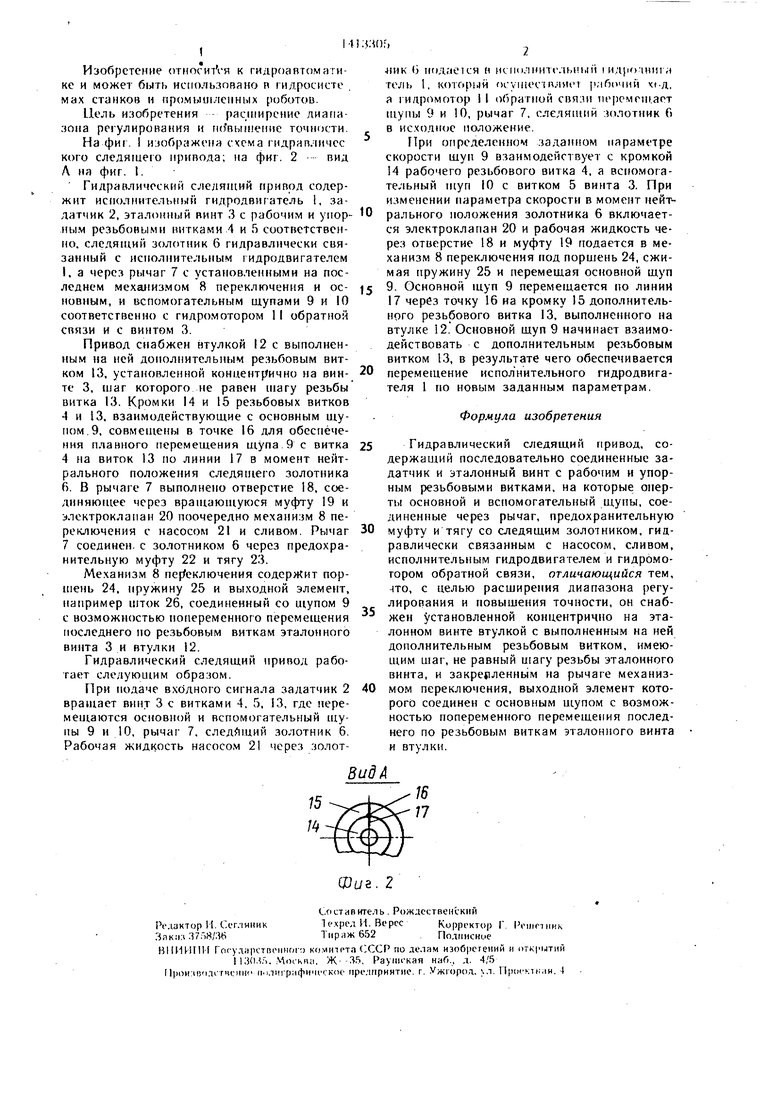
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический следящий привод | 1984 |
|
SU1224467A1 |
| Гидравлический следящий привод | 1985 |
|
SU1285222A1 |
| Гидравлический следящий привод | 1983 |
|
SU1086242A1 |
| Гидравлический следящий привод | 1983 |
|
SU1253230A2 |
| Гидравлический следящий привод | 1982 |
|
SU1130049A1 |
| Гидравлический следящий привод | 1981 |
|
SU1015129A1 |
| Гидравлический следящий привод | 1986 |
|
SU1370329A1 |
| Гидравлический следящий привод | 1987 |
|
SU1432278A1 |
| Следящее устройство для управления исполнительным гидродвигателем | 1980 |
|
SU958723A1 |
| Следящее устройство для управления исполнительным гидродвигателем | 1986 |
|
SU1384841A2 |
Изобретение м.б. использовано в гидросистемах станков и промышленных роботов. Цель изобретения - расширение диапазона регулирования и повышение точности слежрния. Исполнительный гидродвигатель I сГ Язан с золотником 6. который через рычаг 7 - с механизмом 8 переключения, основным и вспомогательным щупам 9. Ш, гидромотором П обратной С11я;чи, эталонным винтом 3 с рабочим и унор мим резьбовыми свитками 4, 5. На винт 3 концсмтричпо установлена втулка 12 с дополнительным резьбовым витком 13, имеющим шаг, не равный шагу резьбы винта 3. Основной щуп 9 взаимодействует с витком 13, что обеспечивает перемещение гидродвигатели по новым заданным парам; трам. 2 ил.
фиг./
Изобретение отноеит гя к гидроапто.мяти- ке и может быть использовано п гидросисте мах станков и промышленных роботов.
Цель изобретения расщирение диапазона регулирования и по вышение точности.
На фиг. 1 и:1оГ)ражена схема гидрапличес кого следящего привода; на фиг. 2 вид Л на фиг. 1.
Гидравлический слелян1ий привод содержит исполнительный гидродвигатель 1, (J НОД.Че1СЯ Н ИС 11ЧЛНИТ(-ЛЫИ|П | I ИД|го:1И1П ,1
толь 1. который ocviiiec iB.iuior p. ifJdMHH х(.д, а гидромотор 1 I обратной свяни и ремгн1.аст щупы 9 и 10, рычаг 7, следящий золотник О в исходное положение.
При определенном заданном нараметре скорости шуп 9 взаимодействует с кромкой 14 рабочего резьбового витка 4, а вспомогательный И1уп 10 с витком 5 винта 3. При изменении нараметра скорости в момент нейт15
датчик 2, эталонный винт 3 с рабочим и упор- 0 рального положения золотника 6 включается электрокланан 20 и рабочая жидкость через отверстие 18 и муфту 19 подается в механизм 8 переключения под поршень 24, сжимая пружину 25 и перемеш.ая основной шуп 9. Основной шуп 9 перемешается по линии 17 через точку 16 на кромку 15 дополнительного резьбового витка 13, выполненного на втулке 12. Основной шуп 9 начинает взаимодействовать с дополнительным резьбовым витком 13, в результате чего обеспечивается перемешение испол нительного гидродвигателя 1 по новым заданным параметрам.
ным резьбовыми нитками 4 и 5 соответственно, следящий золотник 6 гидравлически связанный с исполнительным гидродвигателем I. а через рычаг 7 с установленными на последнем механизмом В переключения и основным, и вспомогательным шупами 9 и 10 соответственно с гидромотором 1 I обратной связи и с винтом 3.
Привод снабжен втулкой 12 с выполненным на ней донолнительиым резьбовым витком 13, установленной концент} ичио на винте 3, шаг которого не равен шагу резьбы витка 13. Кромки 14 и 15 резьбовых витков 4 и 13. взаимодействуюшие с основным шу- I10M.9, совмещены в точке 16 для обеспечения плавного перемещения щупа. 9 с витка 4 на виток 13 по линии 17 в момент нейтрального положения следяп1его золотника 6. В рычаге 7 выполнено отверстие 18, соединяющее через вран1аюшук)ся муфту 19 и электроклапан 20 поочередно механизм 8 переключения с насосом 21 и сливом. Рычаг 7 соединен, с золотником 6 через предохранительную муфту 22 и тягу 23.
Механизм 8 пeffeключeния содержит пор- 1пень 24, пружину 25 и выходной элемент, например шток 26, соединенный со щупом 9 с возможностью попеременного перемешения последнего по резьбовым виткам эталонного винта 3 и втулки 12.
Гидравлический следяший привод работает следующим образом.
При подаче входного сигнала задатчик 2 врашает винт 3 с витками 4, 5, 13, где перемешаются основной и вспомогательный шу- ны 9 и 10, рычаг 7. золотник 6. Рабочая жидкость насосом 21 через золот20
25
30
35
40
Формула изобретения
Гидравлический следящий привод, со- держаший последовате.пьно соединенные задатчик и эталонный винт с рабочим и упорным резьбовыми витками, на которые оперты основной и вспомогательный шупы, соединенные через рычаг, предохранительную муфту и тягу со следящим золотником, гидравлически связанным с насосом, сливом, исполнительным гидродвигателем и гидромотором обратной связи, отличающийся тем. что, с целью расширения диапазона регулирования и повышения точности, он снабжен установленной концентрично на эталонном винте втулкой с выполненным на ней дополнительным резьбовым витком, имеющим шаг, не равный шагу резьбы эталонного винта, и закре{1леннь1М на рычаге механизмом переключения, выходной элемент которого соединен с основным шупом с возможностью попеременного перемещения последнего по резьбовым виткам эталонного винта и втулки.
Фиг. 2
Редактор 11. Сдтлнник ..
Составитель . Рожлсетвенскнй Тс.хрел И. ВересКорректор Г Рошпимк
Тнр;1Жб52Подписное
ВИИИПМ Госу.чарстпоингм о КО.МНТРТЛ ( по делам изобрсгеиий и откритий
113(Ы.. MiK-hna. . Рауми-кая наС)., д. 4/5 lpon:iR(i.4i T4(. п.1Л11|-рифи Ц 1:к К прелпринтно. г. Ужгород. л. П}Н)скт(.-,1н. 4
(J НОД.Че1СЯ Н ИС 11ЧЛНИТ(-ЛЫИ|П | I ИД|го:1И1П ,1
толь 1. который ocviiiec iB.iuior p. ifJdMHH х(.д, а гидромотор 1 I обратной свяни и ремгн1.аст щупы 9 и 10, рычаг 7, следящий золотник О в исходное положение.
При определенном заданном нараметре скорости шуп 9 взаимодействует с кромкой 14 рабочего резьбового витка 4, а вспомогательный И1уп 10 с витком 5 винта 3. При изменении нараметра скорости в момент нейтрального положения золотника 6 включается электрокланан 20 и рабочая жидкость через отверстие 18 и муфту 19 подается в механизм 8 переключения под поршень 24, сжимая пружину 25 и перемеш.ая основной шуп 9. Основной шуп 9 перемешается по линии 17 через точку 16 на кромку 15 дополнительного резьбового витка 13, выполненного на втулке 12. Основной шуп 9 начинает взаимодействовать с дополнительным резьбовым витком 13, в результате чего обеспечивается перемешение испол нительного гидродвигателя 1 по новым заданным параметрам.
5
0
5
0
Формула изобретения
Гидравлический следящий привод, со- держаший последовате.пьно соединенные задатчик и эталонный винт с рабочим и упорным резьбовыми витками, на которые оперты основной и вспомогательный шупы, соединенные через рычаг, предохранительную муфту и тягу со следящим золотником, гидравлически связанным с насосом, сливом, исполнительным гидродвигателем и гидромотором обратной связи, отличающийся тем. что, с целью расширения диапазона регулирования и повышения точности, он снабжен установленной концентрично на эталонном винте втулкой с выполненным на ней дополнительным резьбовым витком, имеющим шаг, не равный шагу резьбы эталонного винта, и закре{1леннь1М на рычаге механизмом переключения, выходной элемент которого соединен с основным шупом с возможностью попеременного перемещения последнего по резьбовым виткам эталонного винта и втулки.
| Гидравлический следящий привод | 1981 |
|
SU1015129A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
