1 11
10 6 16 15 ftf. //..
2i
П
СО со
СО
ч1
е
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочная рампа | 1989 |
|
SU1671589A1 |
| Стационарная самоустанавливающаяся рампа для погрузки и разгрузки автомобилей | 1984 |
|
SU1244071A1 |
| Стационарная самоустанавливающаяся рампа | 1986 |
|
SU1351865A1 |
| Стационарная самоустанавливающаяся рампа для погрузки и разгрузки автомобилей | 1984 |
|
SU1202990A1 |
| Уравнивающий мостик для перегрузки грузов с рампы на транспортное средство | 1980 |
|
SU927697A1 |
| Уравнивающий мостик | 1989 |
|
SU1664695A1 |
| Уравнивающий мостик | 1978 |
|
SU796140A1 |
| Погрузочно-разгрузочный комплекс | 1989 |
|
SU1654191A1 |
| Самоустанавливающаяся рампа | 1989 |
|
SU1629237A1 |
| ТЕЛЕСКОПИЧЕСКОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
SU1837550A1 |

Изобретение относится к подъемным перегрузочным площадкам для погрузки и выгрузки грузов с транспортных средств и позволяет повысить надежность. Перегрузочная рампа содержит шарнйрно установленную одним концом на основании платформу 1 с подпружиненной выдвижной концевой частью 4, несущей поворотный козырек 13 и буферный упор 5. Привод поворота Платформы выполнен в виде шарнйрно установленного на основании эксцентрика 2 с криволинейными направлякщи- ми 10 для взаимодействия с роликами 8 и 9, связанными посредством телескопической подпружиненной стойки 6 с платформой 1. Эксцентрик имеет зубчатую внешнюю кромку 11 для взаимодействия с рейкой, жестко закрепленной на платформе 1 для фиксации платформы при отъезде транспортного средства и нахождении на платформе перегрузочного средства. Эксцентрик 2 связан посредством рычага 3 с вьщвиж- ной концевой частью 4 и буферным упором 5 для взаимодействия с транспортным средством и поворота платформы 1 в рабочее положение до стыковки с транспортным средством. 5 ил. § (Л
Фи.2
Изобретение относится к лодъемным перегрузочным площадкам для погрузки и выгрузки грузов с транспортных с редств.
Цель изобретения - повьппрние надежности.
На фиг. 1 изображена рамЬа, обв толненным в виде шарнирно установ- л:енного на основании эксцентрика 2, связанного посредством рычага 3 с выдвижной концевой частью 4 ппатформы, ЭЪторая снабжена в ниясней части буерным упором 5.
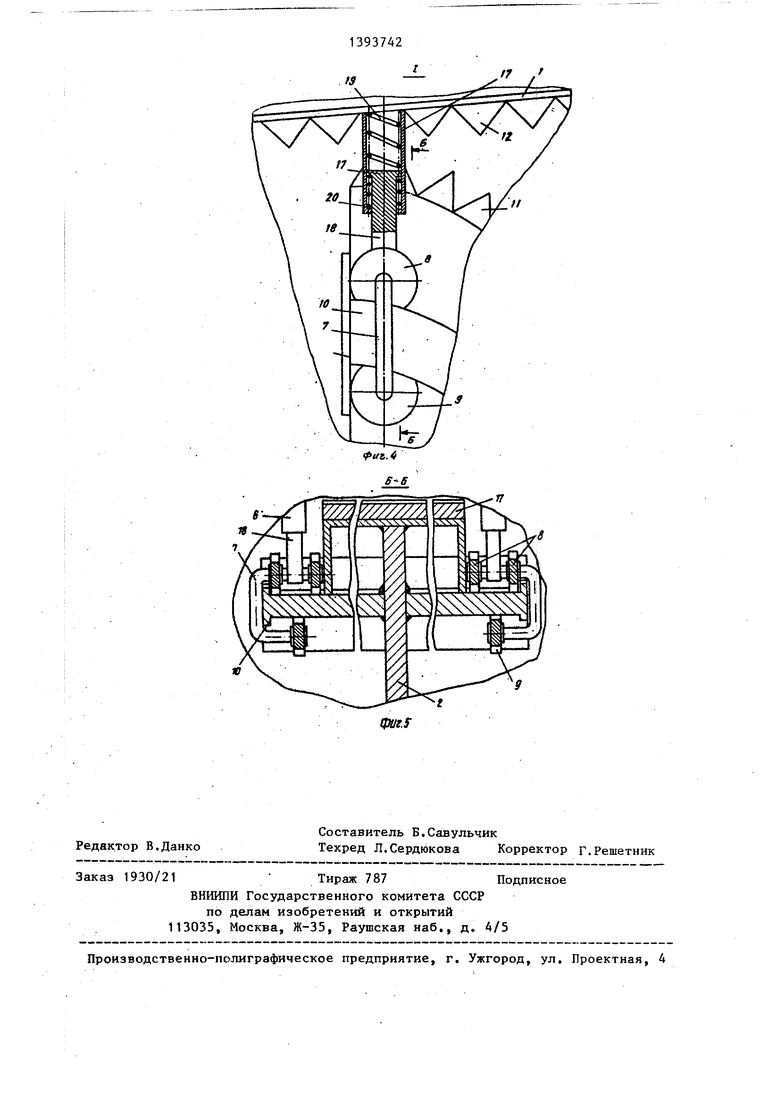
I Платформа соединена с зксцентри- к|ом посредством подпружиненных теле- с|копических стоек 6, которые шарнирн|о соединены со скобами 7, имею(цими в|ерхние 8 и нижние 9 ролийи, опира- к:1щиеся на криволинейные направляющи 10, жестко прикрепленные с боковых сторон к эксцентрику 2, Эксцентрик имеет зубчатую внешнюю кромку 11 для взаимодействия с зубчатой рейкой 12, которая жестко закреплена на нижней стороне платформы 1. Выдвижная часть платформы с буферным упором 5 снаб- 4ена шарнирно смонтированным козырь- KJoM 13 и шарнирно установленной на 4атках 14 Т-образной штангой 15 для Ejзaи oдействия с пружиной 16.
I Телескопическая стойка. 6 содержит з{|естко закрепленную на платформе 1 ильзу 17,- в которой устанс влен с возможностью перемещения ЩТ|ОК 18, г(одпружиненный пружиной 19 относительно платформы и пружиной 20 относительно гильзы.
Перегрузочная рампа еле-- дующим образом.
Транспортное средство ходом подъезжает к рампе и нажимает п орцом своей р амы на буферн ый упор 5 выдвижной части 4 платформь: 1 , перемещая ее. Одновременно посредством рычага 3 перемещается эксцентрик 2
0
5
0
5
0
5
0
против часовой стрелки. Это приводит к опусканию платформы 1 при взаимодействии роликов В и 9 с криволинейными направляющими 10 эксцентрика 2. По мере дальнейшего продвижения транспортного средства 21 козырек 13 поворачивается и ложится на пол кузова транспортного средства.
После окончания погрузочно-раз- грузочных работ платформа возвращается в исходное положение с поворотом эксцентрика 2 в прежнее положение. В случае самопроизвольного отъезда транспортного средства и нахождения на платформе перегрузочной техники происходит выдвижение штока 18 теле- скопической стойки 6 и сжатие верхней пружины 19 до контакта зубчатых поверхностей внешней кромки эксцентрика и платформы и их сцепления.Дяя приведения платформы в исходное положение достаточно съезда с платформы перегрузочной техники. Верхняя пружина 19, жесткость которой рассчитана на собственную массу штат- формы 1, приподнимает ее и посредством возвратных пружин 16 устанавливает платформу в исходное положение.
Формула изобретения
Самоустанавливающаяся перегрузочная рампа, содержащая поворотную в вертикальной плоскости шарнирно закрепленную одним концом на основании платформу с подпружиненной выдвижной концевой частью и шарнирно установленным козырьком, несущую буферный упор, связанный рычагом с механизмом поворота платформы, отличающаяся тем, что, с целью повышения надежности, механизм поворота выполнен в виде шарнирно смонтированного на основании эксцентрика, на боковых сторонах которого выполнены криволинейные направляющие для взаимодействия с роликами, которые связаны с платформой подпружиненными стойка1ми, при этом внешняя кромка эксцентрика выполнена зубчатой для взаимодействия с зубчатой рейкой, которая жестко закреплена на нижней стороне платформы.
16 15
1 ш
2 Фи2.1
ВиЗА
фиг.З
«
9
| Стационарная самоустанавливающаяся рампа | 1986 |
|
SU1351865A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
