i140
i5. io6pe i E;nnp отгюсится к xpanei H o штучных т-рузов л может быть исполь™ зонано в я/обых отраслях промьгашен нос.тк,
Г( -ль изобретения -, повышение удобства в эксплуатации.
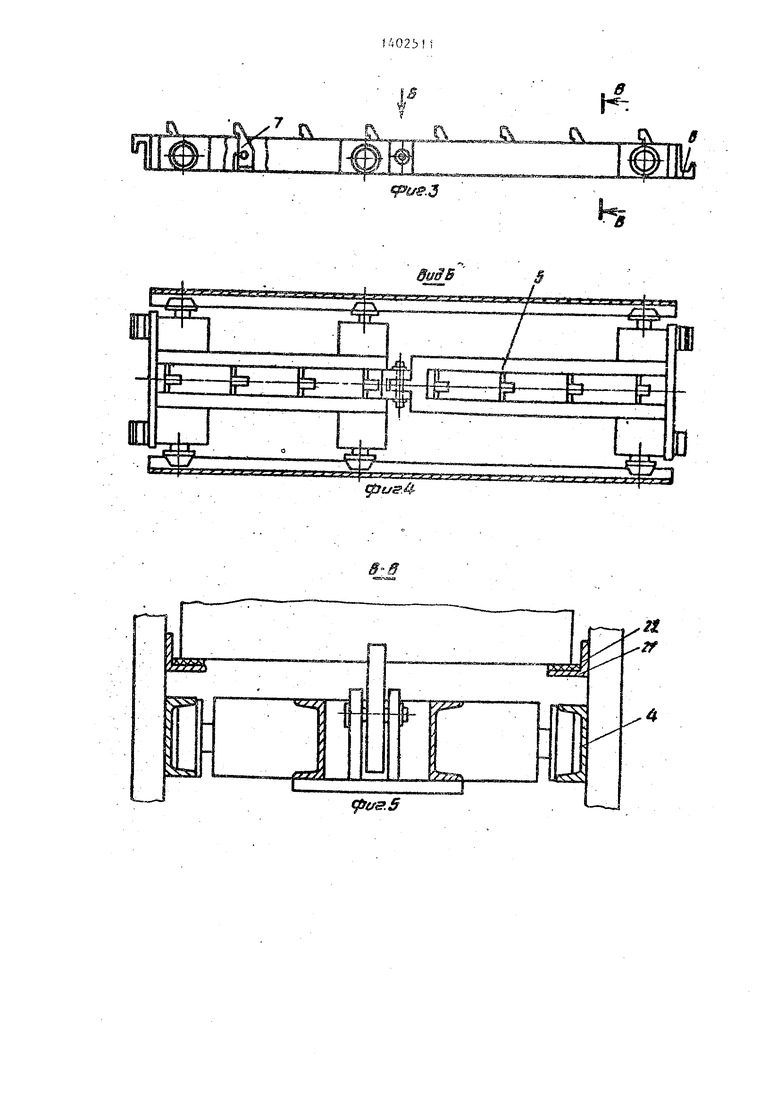
На фиг 1 из.ображеко устройствод общий вид; на фиг, 2 - вид А-А на ;фиг . 1| ни фиг . 3 - рама z грузотол- ;Кателями ь г. Г-образными захватами: :на фиг. 4 - вщц В на фиг. 3| на фиг :; 5 разрез на фиг. 3; на |фиг,б - тележка с платформой общий . |БИ.П; на фиг. 7 - пид Д на фиг, 6.
Склад 1 для хранения штучпгэпс грузов содержит многоярусные стеллажи 2 |с секциями 3,, внутри которых устаноз |лены горизонтальные направляющие 4 :Устройство для перемещения грузов в |секци51х выполнено в виде рамы 5, сос- :тоящей из шзрннрно сочлененных частей на которых установлены за:шаты 6 Г обраэной формы со стороны загрузки выступом вверхj а со стороны раз- :грузки - выступом вниз,, и грузотолка- телей 7 . гранитационно.го типа, размв - щенньк с шагом прсвр51юа ощи;ч габариты ма вепичииу длины г рузотолка- гепай, РЭ:У;Я 5 у.-,таноэлена с, возмож :ксч;тью во вратми-пос гупательнсго пере гещег кя по гори:.зсн : АГ(ЬНЫм напрквляю |ш;им А.,; Устройство для загрузки и рйз- грузки установлано н вартнкалькьа :- JsvipfisnHioiyH.:{. « с, Г1Оз 5Ожностьго перемб
ЬяИЯЙ ПО -K - l и 570 ГОрЙЗОН1ЧШЬНЫМ
Иеяравл.а,-я- 9,. расположенным в верхней, t-iaci i-r склйща 1 н выполнено в виде |поя-ьемно--1 ггусг;: ;&й тележки С шющад- |к:ой 10 с уст-анов-пен- ьм на кай телеско Ьич2 :. : аква : ом 11 Днустороннег с дзйсувиЯ; -(..остояЕсим КЗ неподвижной части (осчованиз) (Zj закрегшенкой ка ллоЕЦйлне 10,, средней части раз
ь-..ше -гной на кепад -.и жяой части 12 с
возможкос- ью вазЕ йтно- -постугЕЗтелького перемещение относительно нее, и верхней тнсти I4f установленной с ерзмож; сстью НСзьратно-пос ;; згпатеЛйнО Г о neoeMea .eiiHH отност-ггапьно средней ° чрстн гшатйор ы Пи неподвижной час Гл 12 шштфирмы устгиовлбнк толка- е:1ы 15,, ь :8П лненные в вгще- сихгойьк 11:;; ЛИ1Щрон с зах.затг- .мк Г сбразной фор 3CTpe :i5Ri зправлеянные захвата .16 на рзме 5 с 15озможностьгс взеимо- Действий с iii-sMK, а Бергикапьные ка- 1равл яющне 8-у-г. т а ко Б лены с нозмож -5ос ; ь:;1 перрмещегчия идопь гортззокталь
1 . 2 .
ньи направляющих 9, расположенных в верхней насти склада t, Склад дополнительно содергжнт горизонтальные направляющие 17, установленные в верхней части склада с другой его стороны, парггллельно основным горизонтальным направляющим 9 с возможностью перемещения по ним вертикальных направляющих 18, взаимодействующих с устройством для загрузки и-разгрузки.
Склад работает следующим образом.
При поступлении груза 19 на рольганг 20 загрузки от датчика занятости (не показан) рольганга загрузки поступает команда на подачу тележки с площадкой 10 к месту загрузки. Тележка с площадкой 10, передвигаясь j в вертикальных направляющих 8, кото рые в св.ою очередь вместе с устройством для загрузки передвигаются в. горизонтальных направляющих 9, размещается в нижнем полоясении напротив рольганга загрузки 20, причем эерх- няя часть 14 захвата располагается ниже уровня нижней поверхности груза. Команда на останов тележки с площадкой 10 поступает от датчика ее крайнего положения (нижнего) (не показан) , При совместной работе этого датчика с датчиком занятости рольган-. га загрузки 20 вырабатывается команда ка выдвижение средней 13 и верх- . ней 14 частей платформь под груз 19s расположеннь й на рольганге 2Q загруз-; ки. При полном выдвижении средней 13, к верккей 14 частей платформы-относительно неподвижной части 12 от датчика крайнего правого положения (не показан) верхней 14 части захвата поступает, команда ид эьзключенне привода платформы и на подъем тележки,. При подъеме тележки с глощадкой 10 происходит размещение груза 19 на верхней 14 захвата. После от- рьгаа груза 19. от рокьгакга 20 Э8 грузки и сбраэовакия: яазора между верхней поверхность; sToi-o ролы &нга и ншкней понеркностью груза 19 до- статочного для беспоепятотзйнкого . перемещекк ; груза 19 над ним, от дат- .. 3 ТОГО положения 1 влеж1се с гшо -- щадкой, 10 поступает команда на выклю- че:.ке привода подъема этой тележки, :-:;й включение привода перемещения срадией 13 и верхней 1ч частей, згг™ жвата в направлении их среднего поло ИрЙ1вод выключается по коман- ) де от датчика среднего положения (не
31
показан), уста 1опле}гнот о на неподвижной 12 части захвата. Груз 19 пр этом ра зме1цен на верхней 1А части захвата. Затем от кодовой пластины, установленной на грузе 19, по команде от ЭВМ или по команде от оператора, обслуживающего склад 1, происходит адресование тележки с площадкой 10 к определенной секции 3 склада 1. Пр этом одновременно включаются привод вертикального перемещения тележки с площадкой 10 по направляющим 8 и привод перемещения вертикальных направляющих 8 по горизонтальным направляю щим 9. Останов тележки с площадкой 1 напротив загруженной секции происходит по команде от датчика положения (не показан) тележки с площадкой 10 относительно вертикальных направляю- 1ЦИХ 8 и от датчика положения (не по- казан вертикальных направляющих 8 относительно горизонтальных хнаправ- ляющих 9, причем нижняя поверхность груза 19 располагается выше уровня опорной поверхности 2 для контейнеров в секции 3, а после останова тележки с площадкой 10 напротив загрузочной секции 3 дается команда на вьцвижение толкателей 15, которые при выдвижении оказывают давление - своими вертикальными поверхностями Г-образных захватов 16, обращенными к складу 1, на раму 5, установленную в горизонтальных направляющих 4 сек- дин 3, Рама 5 с установленными на ней грузотолкателямй 7 гравитационно го.типа под-действием толкателей 15 перемещается по горизонтальным направляющим 4 в сторону разгрузки; грузотолкаТели 7, оказывая давление на все ранее установленные в секции .грузы 19, перемещаются по опорной поверхности 21, снабженной антифряк- ционными накладками 22, Останов толкателей 15 при их полном вьздвижении происходит по команде датчика их крайнего положения, при этом же подается команда на выдвижение средней 13 и верхней 14 частей телескопической захвата с грузом 19 в крайнее левое положение. После достижения крайнего положения от датчика этого положения телескопического захвата поступает команда на опускание тележки с площадкой 10, При опускании тележки с площадкой 10 происходит установка груза 19 на опорную поверхность 21 к зацепление Г образных за
Q 5 о 5 Q 5
5
5
хвлтоп f) и J ft ,I 5 толкато.чсм 13, После опразоплния заяора межлу нижней попорхиостьн) груза 19 и верхней частью 1Д телегког1нческо1-о :1лхг},чта и обеспечения зацепления при зтом Г-оГфазных захрлтои 6 и 16 по команде от датчика этого положения тележки с площадкой 10 поступает команда на выключение привода вертикального перемещения тележки с площадкой 10 и на вьщрижение толкателей 15, при этом Г-образкый захват 16 увлекает за собой Г-образный захват 6, а сле- доват ёльио, и раму 5 с грузотолкателямй 7, которые при обратном двюкении рамы 5 под воздействием установленных в секции 3 грузов 19 отклоняются и беспрепятственно проходят под ними. После выхода грузотолкателей 7 из-под грузов 19 они под действием сил гравитации возвращаются в исходное положение. Одновременно с зтим происходит перемещение верхней 14 и средней 13 частей телескопического захвата в среднее положение, по достижении которого по команде от датчика этого положения включается привод вертикального перемещения тележки с площадкой 10 на подъем. При подъеме происходит расцепление Г-образных захватов 6 и 16 и после этого выдвижение толкателей 15. до исходного положения. Подъем тележки с площадкой .10 происходит до по.1южения, в котором она находилась перед началом загрузки секции 3, Достигнув этого по ложения, эта тележка останавливается и может перемещаться к рольгангу 20 загрузки за следующим грузом 19. Выгрузка грузов 19 происходит с про тивоположной стороны склада 1 при помощи устройства для разгрузки по той же схеме, как и загрузка, т.е. тележка с площадкой 10 перемещается по направляющим 17 и 18 под груз 19, выдвигаются верхняя 14 is средняя 13 части телескопического захвата, выдвигается толкатель 15, поднимается груз 19 с опорных поверхностей 21, происходит зацепление захватов 6 и 16, груз 19 перемещается в среднее положение на площадке 10, толкатели 16 выдвигаются, перемещая при этом грузы 19 на один шаг, затем толкатели 16 выдвигаются, перемещая раму 5 в исходное положение, тележка с площадкой 10 опускается в первоначальное положениеS при этом проИс

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система для перегрузки штучных грузов | 1986 |
|
SU1435514A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1131779A1 |
| Склад для хранения штучных грузов | 1989 |
|
SU1729958A1 |
| Устройство для загрузки контейнеров | 1987 |
|
SU1411243A1 |
| Склад штучных грузов | 1980 |
|
SU992345A1 |
| Склад для хранения длинномеров | 1989 |
|
SU1698149A1 |
| Транспортная тележка автоматической линии | 1985 |
|
SU1414562A1 |
| Сталкивающее перегрузочное устройство для обслуживания транспортного средства | 1987 |
|
SU1465402A1 |
| Транспортное средство для перевозки длинномерных грузов | 1990 |
|
SU1749075A1 |
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |


А-А
spuffZ
JUJi.
О
м
яизажядеаавзезааагжааЕавезв
Ё--Н-- 1
гч
f тГт
«иЬпКмЗЕ
c a ,g
lлa yfSl JtвiaяяfUlaeяtf SSf ЯxЯ :t ЬxsSУA Яii:
V
Д
жгясхзежз ЯЕ
p-p
SI
Z. - V -TJ
n
gft/.S
MA
Фи9.7
15
3
| Склад для хранения грузов | 1980 |
|
SU981125A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
