16
20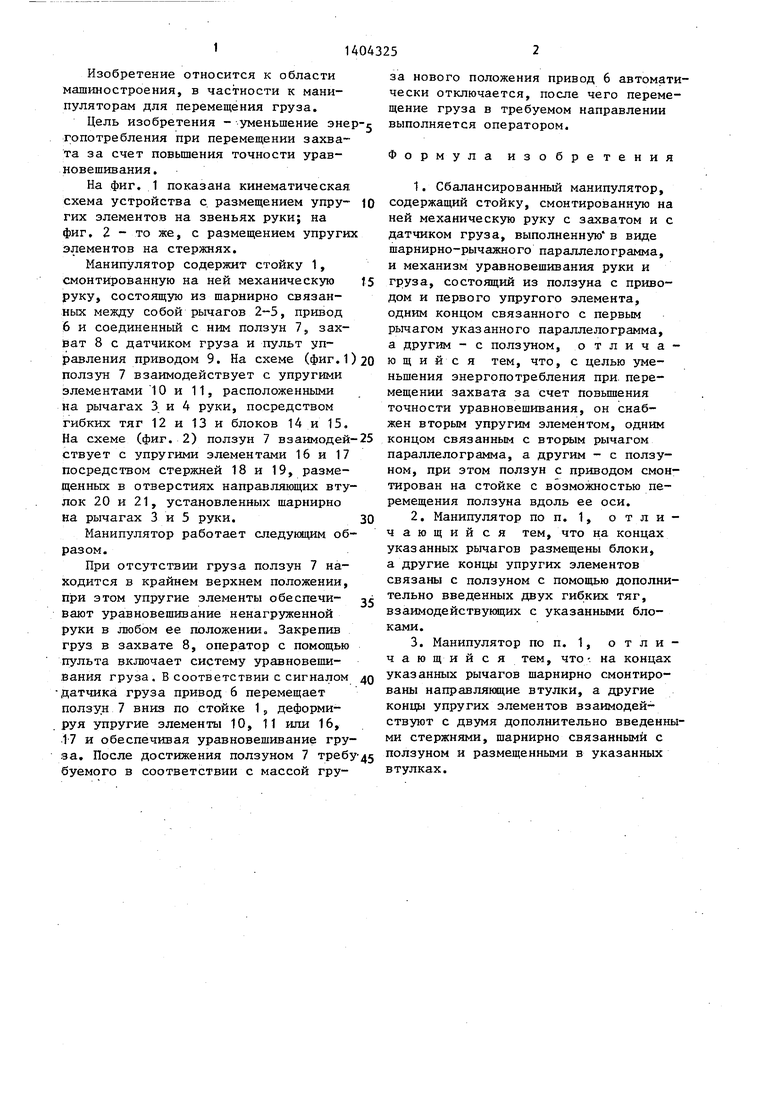
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированный манипулятор | 1986 |
|
SU1379105A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
| Манипулятор для микросварки | 1984 |
|
SU1155405A1 |
| Манипулятор | 1986 |
|
SU1324843A1 |
| Манипулятор | 1979 |
|
SU781052A1 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ПЕРЕМЕЩЕНИЯ ПРОДУКЦИИ ПОДВЕСНОГО РАЗМЕЩЕНИЯ | 2024 |
|
RU2841086C1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор с уравновешиванием груза | 1989 |
|
SU1705229A1 |
Изобретение относится к области машиностроения и, в частности, к манипуляторам для перемещения груза. Цель изобретения - уменьшение энергопотребления при перемещении захвата за счет повьш1ения точности уравновешивания. Закрепив груз в захвате 8, оператор с помощью пульта 9 включает систему уравновешивания груза. В соответствии с сигналом датчика груза, размещенного в захвате В, привод 6 перемещает ползун 7 вниз по стойке 1, деформируя упругие элементы 16 и 17 и обеспечивая уравновешивание груза. После этого привод 6 автоматически отключается и перемещение груза в требуемом направлении.осуществляется оператором. 2 з.п. ф-лы, 2 ил.
Фиг. 2
Изобретение относится к области машиностроения, в частности к манипуляторам для перемещения груза.
Цель изобретения - уменьшение энер гопотребления при перемещении захвата за счет повышения точности уравновешивания.
На фиг. 1 показана кинематическая схема устройства с размещением упру- гик элементов на звеньях руки; на фиг. 2 - то же, с размещением упругих элементов на стержнях.
Манипулятор содержит стойку 1, смонтированную на ней механическую руку, состоящую из шарнирно связанных между собой рычагов 2-5, привод 6 и соединенный с ним ползун 7, захват 8 с датчиком груза и пульт управления приводом 9. На схеме (фиг.1) полззта 7 взаимодействует с упругими элементами 10 и 11, расположенными на рычагах 3 и 4 руки, посредством гибких тяг 12 и 13 и блоков 14 и 15, На схеме (фиг. 2) ползун 7 взаимодействует с упругими элементами 16 и 17 посредством стержней 18 и 19, размещенных в отверстиях направляющих втулок 20 и 21, установленных шарнирно на рычагах 3 и 5 руки.
Манипулятор работает следунщим образом.
При отсутствии груза ползун 7 находится в крайнем верхнем положении, при этом упругие элементы обеспечи- Вают уравновешивание ненагруженной руки в любом ее положении. Закрепив груз в захвате 8, оператор с помощью пульта включает систему уравновешивания груза. В соответствии с сигналом датчика груза привод 6 перемещает ползун 7 вниз по стойке 1, деформируя з пругие элементы 10, 11 или 16, 17 и обеспечивая уравновешивание груза. После достижения ползуном 7 требу дуемого в соответствии с массой груза нового положения привод 6 автоматически отключается, после чего перемещение груза в требуемом направлении выполняется оператором.
Формула изобретения
а другим - с ползуном, отличающийся тем, что, с целью уменьшения энергопотребления при. перемещении захвата за счет повьш1ения точности уравновешивания, он снабжен вторым упругим элементом, одним концом связанным с вторым рычагом параллелограмма, а другим - с ползуном, при этом ползун с приводом смонтирован на стойке с возможностью перемещения ползуна вдоль ее оси.
а другие концы упругих элементов связаны с ползуном с помощью дополнительно введенных двух гибких тяг, взаимодействующих с указанными блоками.
Фиг.1
| Кран-манипулятор | 1978 |
|
SU933622A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
