Изобретение относится к машиностроению, в частности к промышленным роботам, предназначенным для использования в совокупности с металлообрабатывающим оборудованием.
Цель изобретения - упрощение конструкции, снижение материалоемкости и массогабаритных параметров за счет применения единого централизованного привода перемещения всех подвижных элементов.
На чертеже показан исполнительньй орган промышленного робота (ПР).
4D43372
тов) включается электромагнитная муфта 1 3 и вал 2 получает вращение от колеса 9, жестко связанного со стаканом 14. Головка 3 пово.рачивается в корпусе 1 и после отключения муфты 13 фиксируется в нужном положении.Для перемещения губок захвата включают одну из муфт 12. При этом диск 5 получает вращение от зубчатого колеса 11 и подвижные губки 6 перемещаются в радиальном направлении, обеспечивая зажим или (при реверсировании двигателя) разжим изделия в захвате..
10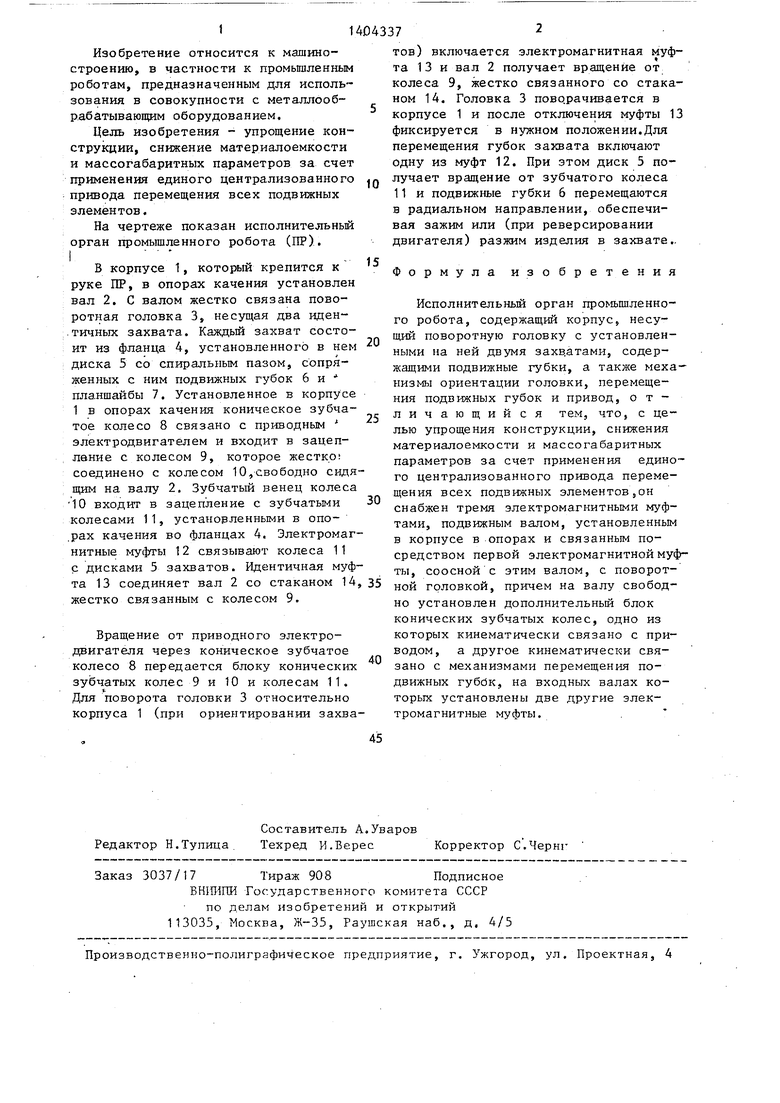
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Приводное устройство для вращения захвата руки промышленного робота относительно взаимно-перпендикулярных осей и движения губок захвата | 1980 |
|
SU919865A2 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Захватное устройство | 1982 |
|
SU1013264A1 |
| Сборочная головка с автопоиском | 1984 |
|
SU1227401A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Захват промышленного робота | 1980 |
|
SU975387A1 |
Изобретение относится к машиностроению и, в частности, к промышленным роботам, предназначенным для использования в совокупности с метал- лообрабатьшающим оборудованием. Целью изобретения является упрощение конструкции, снижение материалоемкости и массогабаритных параметров за счет применения единого централизованного привода перемещения всех подвижных элементов.Вращение от привода через коническое зубчатое колесо 8 передается ка блок конических зУбча- тых колес 9, 10. Для поворота головки 3 относительно корпуса 1 включается электромагнитная муфта 13. Для перемещения подвижных -губок 6 захвата включают одну из двух других дополнительных электромуфт 12. 1 ип. с $ (Л 4 00 00 
В корпусе 1, который крепится к руке ПР, в опорах качения установлен вал 2. С валом жестко связана поворотная головка 3, несущая два иден- .тичных захвата. Каждьй захват состоит из фланца 4, установленного в нем диска 5 со спиральным пазом, сопряженных с ним подвижных губок 6 и планшайбы 7. Установленное в корпусе 1 в опорах качения коническое зубчатое колесо 8 связано с приводным электродвигателем и входит в зацепление с колесом 9, которое жестко; соединено с колесом 10,свободно сидящим на валу 2. Зубчатый венец колеса 10 входит в зацепление с зубчатыми колесами 11, установленными в опо- .рах качения во фланцах 4. Электромагнитные муфты 12 связывают колеса 11 С дисками 5 захватов. Идентичная муф
Исполнительньй орган промьш1ленно- го робота, содержащий корпус, несущий поворотную головку с установленными на ней двумя захв.атами, содержащими подвижные губки, а также механизмы ориентации головки, перемещения подвижных губок и привод, отличающийся тем, что, с целью упрощения конструкции, снижения материалоемкости и массогабаритных параметров за счет применения единого централизованного привода перемещения всех подвижных элементов5он снабжен тремя электромагнитными муфтами, подвижным валом, установленным в корпусе в опорах и связанным посредством первой электромагнитной муфты, соосной с этим валом, с поворотта 13 соединяет вал 2 со стаканом 14, 35 „ой головкой, причем на валу свобод- жестко связанным с колесом 9.„ установлен дополнительньй блок
конических зубчатых колес, одно из которых кинематически связано с приводом, а другое кинематически связано с механизмами перемещения подвижных губбк, на входных валах которых установлены две другие электромагнитные муфты.
Вращение от приводного электродвигателя через коническое зубчатое колесо 8 передается блоку конических зубчатых колес 9 и 10 и колесам 11. Для поворота головки 3 относительно корпуса 1 (при ориентировании захва40
Формула изобретения
Исполнительньй орган промьш1ленно- го робота, содержащий корпус, несущий поворотную головку с установленными на ней двумя захв.атами, содержащими подвижные губки, а также механизмы ориентации головки, перемещения подвижных губок и привод, отличающийся тем, что, с целью упрощения конструкции, снижения материалоемкости и массогабаритных параметров за счет применения единого централизованного привода перемещения всех подвижных элементов5он снабжен тремя электромагнитными муфтами, подвижным валом, установленным в корпусе в опорах и связанным посредством первой электромагнитной муфты, соосной с этим валом, с поворот„ой головкой, причем на валу свобод- „ установлен дополнительньй блок
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
