////////// /: / / / / / / / / /
Фаг.
(Л
со ;о о
ния в вертикальной плоскости с помощью винтовой пары 4-, В направляющих стрелы 3 установлены подвижные от приводов 9 и 10:внутренняя 6 и наруж- нпя 7 захватные головки (Г), выполненные с поворотными вокруг общей горизонтальной оси центрами. На Г 7 смонтирован привод 8 для ориентации изделий 13. Радиально относительно общей горизонтальной оси центров на
Г 7 установлены два конечных выключателя (КВ), При подходе изделия 13 на позицию съема С 3 опускается на высоту захвата,Т 6 и 7 сжимаются и затем С 3 поднимается на максимальную высоту. Когда KB, установленные на Г 7, не срабатывают, изделие 13 вращается вокруг своей горизонтальной оси под воздействием привода 8 до срабатывания КВ. 7 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2085461C1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1085909A1 |
| УСТАНОВКА ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ТУННЕЛЬНОЙ ПЕЧИ | 1989 |
|
RU2010869C1 |
| Устройство для поворота грузовых подвесок конвейера | 1983 |
|
SU1155535A1 |
| Агрегат для поточного эмалирования труб | 1976 |
|
SU740864A1 |
| Кран для погрузочно-разгрузочныхОпЕРАций HA пОдВЕСНОМ КОНВЕйЕРЕ | 1979 |
|
SU806587A1 |
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1152894A1 |
| Установка для групповой клепки | 1986 |
|
SU1349867A1 |
| Устройство для навешивания и съема грузовых подвесок с тележки толкающего конвейера | 1977 |
|
SU740641A1 |
| Лесозаготовительная машина | 1982 |
|
SU1069708A1 |

Изобретение относится к подъем но-транспортному машиностроению. Цель изобретения - повьшение надежности ориентированной передачи изделий типа коленчатых валов. В направляюпдах поворотной вокруг оси от привода 12 вертикальной колонны 1 смонтирована с возможностью вертикального перемещения на катках каретка 2.. К последней шарнирно подвешена стрела (с) 3 с возможностью регулировки ее положе-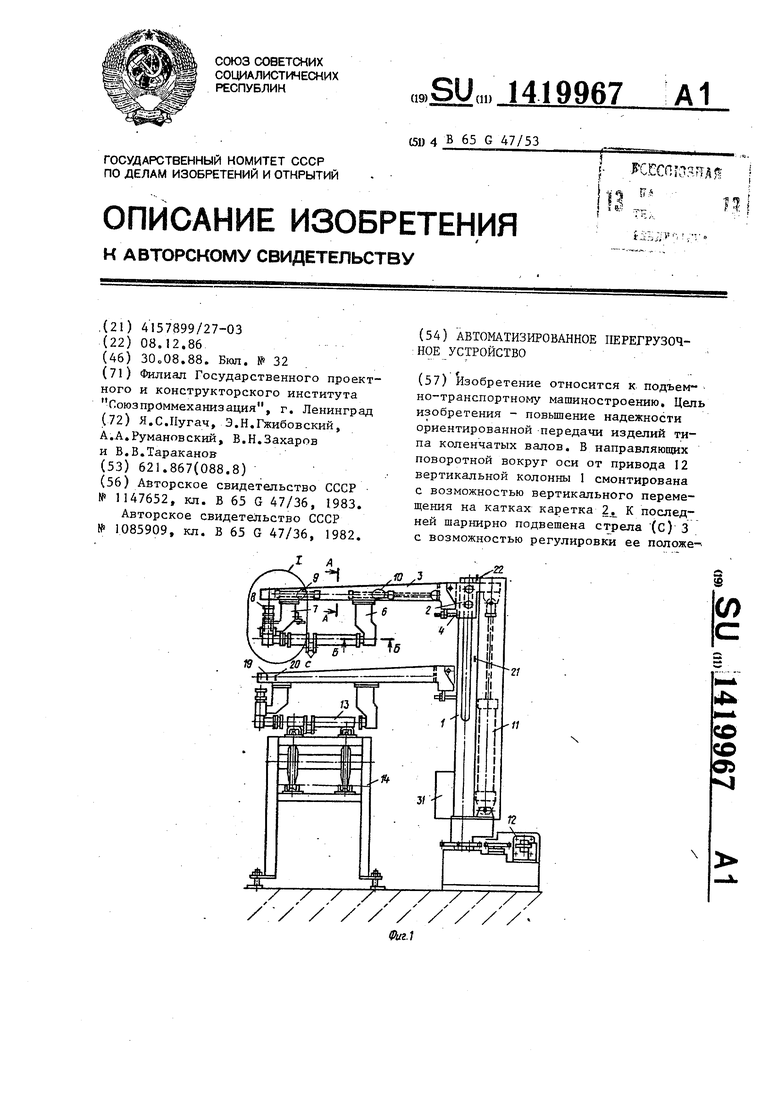
1
Изобретение относится к подъемно- ранспортному машиностроению и предазначено для передачи штучных груов с одного конвейера на другой с озможностью их ориентации в процесе перегрузки.
Цель изобретения - повышение наежности ориентированной передачи изделий типа коленчатых валов.
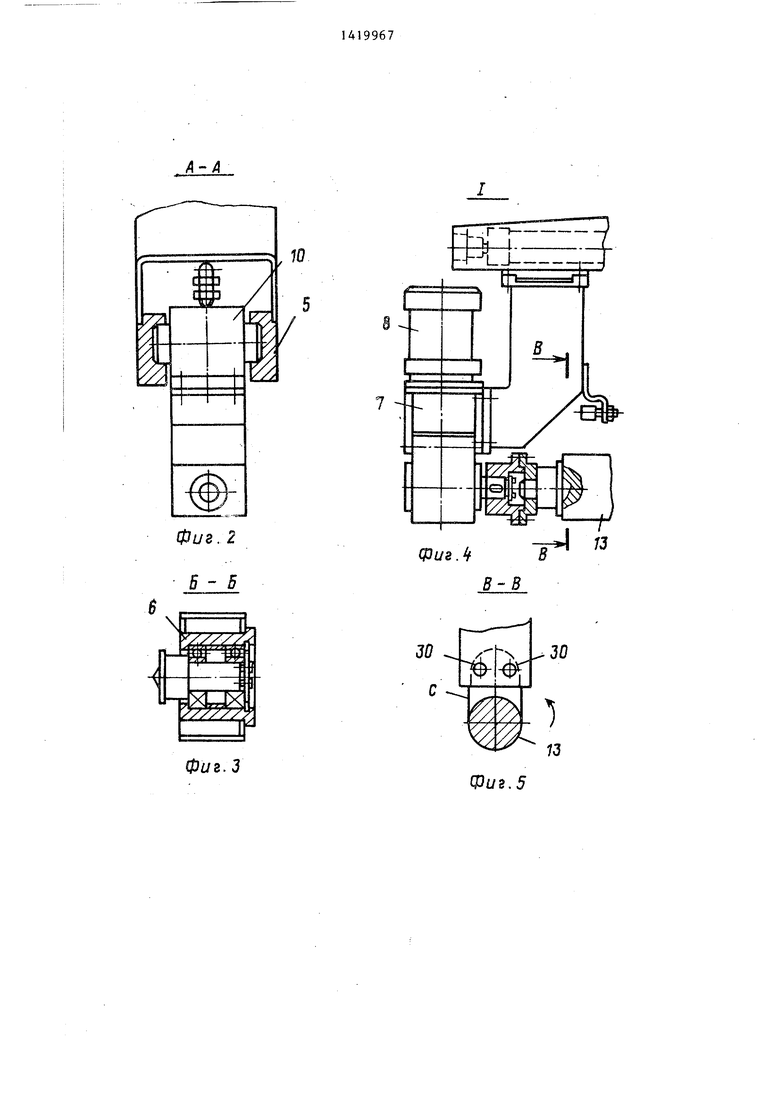
На фиг.1 изображено устройство, общий вид; на фиг.2 - разрез А-А на фиг,1; на фиг.З разрез Б-Б на фиг«1; на фиг„4 - узел 1 на фиг Л (захватная головка с приводом ее ориентации); на фиг.З - разрез В-В на фиг.4; на фиг.6 - предлагаемое устройство с .подающим и приемньши конвейерами;, вид в плане; на фиг.7 - разрез Г-Г на фиг.6.
Устройство состоит ИЗ вертикальной колонны 1 с направляющими, в которых смонтирована с возможностью вертикального перемещения на катках каретка 2. К каретке шарнирно подвешена стрела 3 с возможностью регулировки ее наклона с помощью механизма регулировки в виде винтовой пары 4. В направляющих 5 (фиг.2) стрелы 3 установлены с возможностью перемещения внутренняя 6 (фиг.З) и наружная 7 (фиг.4) захватные головки. На наружной захватной головке 7 смонтиро- ван привод 8 поворота для ориентации изделий типа коленчатых валов (фиг.4), Захватные головки 6 и 7 имеют возможность перб;мещения по направляюшям 5 с помощью приводов 9 и 10 перемещения (фит.1). Стрела 3 имеет возможность перемещения в вертикальной плоскости под действием привода 11 подъема. Колонна 1 .ет возможность
вращения относительно своей вертикальной оси путем взаимодействия с приводом 12 поворота (фнг.1), В исходном положении изделия 13.типа
коленчатых валов с уступами с находятся на подающем конвейере 14 (фиг.1). Конвейеры Л5 и 16 - приемные. Все. конвейеры установлены с возможностью работы в шаговом режиме. На их цепях смонтированы ложементы 17 (фиг„7) для фиксирования и транспортировки перегружаемых -изделий в требуемом положении. Конт- рольньй стол 18 установлен с возможностью приема перегружаемых изделий и производства на нем операций по их контролю. Конечные выключатели 19 и
20(фиг.1) установлены на стреле и служат для выдачи сигнала о положении захватных головок 6 и 7 в раздвинутом и сведе нном положениях соответственно. Конечные выключатели
21и 22 установлены на колонне и- служат для выдачи сигнала о крайних нижнем и верхнем положениях соответственно. Конечные выключатели 23-26 (фиг.б) установлены на опорной части колонны и служат для выдачи сигнала о положениях колонны при повороте. Конечньш выключатель 27 установлен на подающем конвейере и сигнализирует о наличии транспортируемого изделия на подающей позиции. Конеч- ные выключатели 28 и 29 установлены
на приемных конвейерах и служат для . выдачи сигнала о наличии пустых ло- жементов на позициях загрузки. Конеч- ные выключатели 30 (фиг.З) радиаль- но установлены на захватной головке 7 и служат для выдачи сигнала о положении уступа с при ориентации, i, Сис
тема 31 автоматики, установленная на колонне 1, служит для вьщачи команд на приводы устройства в зависимости от срабатывания соответствующего набора конечных выключателей.
Устройство работает следую1цим образом.
В исходном положении стрела 3 находится над подающим конвейером 14 в крайнем верхнем положении. Задействован конечный выключатель 22. Захватные головки 6 и 7 раздвинуты, о чем сигнализирует конечный выключатель 19. Задействован конечный выклю-js конечного выключателя 23. Работа уст- чатель 23. При подходе изделия 13 на позицию съема срабатывает конечный выключатель 27. Стрела 3 опускается на высоту захвата, о чем сигнализирует конечный выключатель 21. Далее 20 захватные головки сжимаются, срабатывают конечные выключатели 20 и стрела поднимается на максимальную высоту. Срабатывает конечный выключатель 22. После этого, если конечные выключате-25 ли .30 не затемнены, т.е. уступ с издероиства при перегрузке изделии на контрольный стол 18 осуществляется в ручном режуме при отключении автоматики.
Формула изобретения
Автоматизированное перегрузочное устройство, включающее поворотную вокруг оси вертикальную колонну, смонтированную на катках, и подвижную вдоль нее каретку с установленной на ней стрелой, выполненной с направляющими, в которых установлены подвижные от приводов захватные головки, отличающееся тем, что, с целью повьшения надежной ориентиро- ванной передачи изделий типа коленчатых валов,- стрела установлена на каретке шарнирно и снабжена механизмом регулирования ее положения в вертикальной плоскости, при этом захватные головки выполнены с поворотными вокруг общей горизонтальной оси центрами, один из которых имеет привод
лия 13 находится не перед ними, то начинается вращение изделия вокруг своей горизонтальной оси вращения под воздействием привода 8 поворота до затемнения зоны установки конечных выключателей 30. Таким образом, изделие фиксируется в требуемом положении. После срабатывания выключателей 30 стрела поворачивается для работы с одним из конвейеров 15 или 16 в зависимости от показаний конечных выключателей 28 и 29 (фиг.6), которые сигнализируют о наличии свобод
Автоматизированное перегрузочное устройство, включающее поворотную вокруг оси вертикальную колонну, смонтированную на катках, и подвижную вдоль нее каретку с установленной на ней стрелой, выполненной с направляющими, в которых установлены подвижные от приводов захватные головки, отличающееся тем, что, с целью повьшения надежной ориентиро- ванной передачи изделий типа коленчатых валов,- стрела установлена на каретке шарнирно и снабжена механизмом регулирования ее положения в вертикальной плоскости, при этом захватные головки выполнены с поворотными вокруг общей горизонтальной оси центрами, один из которых имеет привод
ных ложементов 17 на конвейере 15 нпи о попорота,, а одна из захватных голо16 в зоне приема изделий.
Если ложементы 17 свободны на конвейере 15 и 16, то работа осуществляется с тем конвейером, заполнение ковок снабжена двумя конечными выключателями, радиально установленными относительно общей горизонтальной оси центров.
торого наиболее необходимо из конкретных технологических условий. При повороте стрелы 3 к конвейеру 15 или 16 срабатывают конечные выключатели 28 или 29.соответственно. Стрела опускается, при этом срабатывает конечный выключатель 21. Захватные головки разжимаются, при этом срабатывают конечные выключатели 20 и изделие оказывается на ложементе 17. Далее стрела поднимается до срабатывания конечного выключателя 22 и поворачивается в исходное положение до срабатывания
конечного выключателя 23. Работа уст-
роиства при перегрузке изделии на контрольный стол 18 осуществляется в ручном режуме при отключении автоматики.
Формула изобретения
Автоматизированное перегрузочное устройство, включающее поворотную вокруг оси вертикальную колонну, смонтированную на катках, и подвижную вдоль нее каретку с установленной на ней стрелой, выполненной с направляющими, в которых установлены подвижные от приводов захватные головки, отличающееся тем, что, с целью повьшения надежной ориентиро- ванной передачи изделий типа коленчатых валов,- стрела установлена на каретке шарнирно и снабжена механизмом регулирования ее положения в вертикальной плоскости, при этом захватные головки выполнены с поворотными вокруг общей горизонтальной оси цент. рами, один из которых имеет привод
попорота,, а одна из захватных головок снабжена двумя конечными выключателями, радиально установленными относительно общей горизонтальной оси центров.
10
/
Фиг, 2 6-5
ЧГ-Т
№3
фиг.З
ГЗ
30
Фиг.5
Фиг.6
Фиг. 1
| Устройство для загрузки и разгрузки подвесного конвейера | 1983 |
|
SU1147652A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1085909A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
