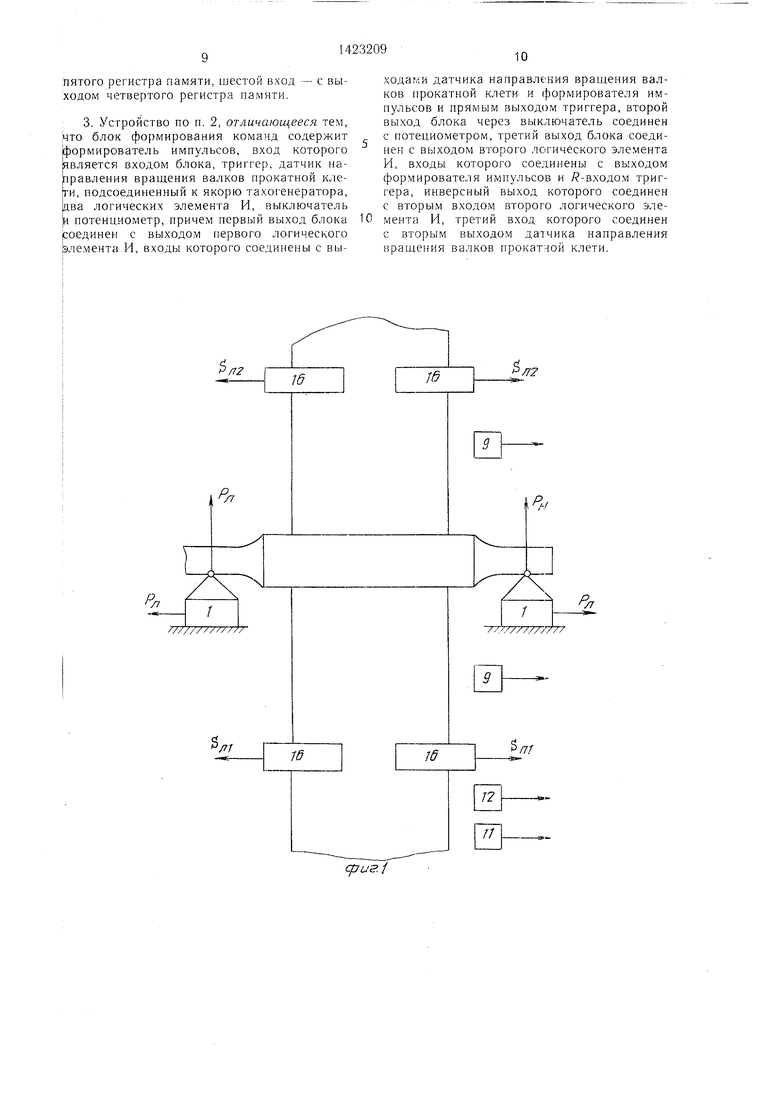
Изоб;)е ге -;1;е О пгоситси к ;;, оог (роткн металлов давлепиел., т. с. к .()му ароизводству, и касается (;ма гическо1Ч) Центрирования полос OTHocHre iiiiio оси про- ifaTKH, преиму111;ес ; венно в реверсивных кле- {ях нрокатных и дрессировочных станов. I Цель изобретения - снижение конереч- йой разнотолн;ин1кн:ти нолосы н обес:;ечение УСТОЙЧИВОЙ деформации ;етал,:1а к (алках. ; На фиг. 1 доказано располохонне датчн- IJCOB; на фиг. 2 - - блок-схема системы авто- матичеекого центрирования i u,:iccbi на peiiep- сивных толстоли(.:товых г;рока iibix станах, реализующая нредлагае.мый ciiorcio. I Устрсйство содержит .татчи;-;: 1 усг: iri;i |)еакций опор валков, расноло/1 ои1-;: е иод itipaBBiM и jieBbiM иа кнмцьн . :и винтами, шесть ;|:умматоров 2, колну1утатор 3, блок 4 q)op. |1)ования команд, девять perHCT i;)ii о намяти, Делительный б,лок б, блок 7 углио/чхения, два ;|1ривода 8 ;у;а1Л1нулято)ов, 1)ас1)0ло 1 енг1ых йеред и за клетью, .;хва Э 1;а,.|ичия раеката в зоне работы маципулиТО)ив, т;);; „11ог ических э.лемента 10 И, датчгл; i 1 ;;аличнн ;|1олоеы перед клетыо, датчик :2 панравлеиии движения раската, логически :; ле 1 е1П 13 ИЛИ, дза регулято,)а Г1ол :жен11и. два. ,Tb-oprai;a I о. четыре датш-нча Ifi :;:..1о;ке- ия крс;лок нолоеы, рас1,оложоми1)1е nepej. И за клетью, нричем выход не|.а;ого датчи- ijva 1 усилия реакции оно) валкок соеднлеи С входом iiejiBoro и втоцого с улмч.ятороз 2. BTOpOiX) датчика I уеи.лия реакции (Ьнор ва,:1К()в соединен с втopьi цi входами ijiepBOi o и BTOpGi o сумматгфов, ьыход fiepBO- fo сумматора 2 сое;1инен с це(Л) входами ijiepBoro, второго и тоетьо о регистров 5 намяти и с Bxo,;i,OM блока 4 с}к))ми()ования команд, второго еу..1матора 2 С первыми входами четвертого, | , гиго и Hiec- roi O perHci poij 5 намяти, входы иер- ioi o и Hiee i oro реш-стров 5 Г1ам)Г1-и с(1е.ииен;;
команд, первыми входами первого и второго ко.чмутаторов 3, не)вым входом ее;:-;ьмо1 ;; })егиетра .5 памяти и нервым вхо.лом г ерво1 о , 1огичеекого элемента 10 И, вто)ые входы третьего и четвертого регастров 5 намят Соеди1 ены с вторым выхо.цом блока 4 фпо- -Иирования команд, вгорыкш Вл(;. :.ами перпо го и второго коммутаторов 3 и с nepi-shiM входом восьмого региет)а о памяти, вторые бходы второго и иятог о perHCTjn ii 5 памяти соединены с третьим выходом- блока 4 фор- мировани я команд, т 1етьими входами nefiBo- го и второго комл Утаторо-5 3, пеппыми вхо- .цами девятого регистра о намяти и iicpBbiAi входом .Oi HMecKoro элемента 1 МЛ И, ито- рой вход которого еоедн;н:-н е- вт:ходом irro- рого ,:1ог Н1еекого элемента 10 И, входгл которого еоединены с выходами да 1чико ia;iH- чия 1 I по.юеы лерод к,1етью и нанравлеиия движения 12 раската п б,. 1ока клман., Лз1. Конец никла... (не иоказан), зыход Л(.1ги- еехо: г) леме}1та 13 МЛН соеди1- ен с HCtMSbiM вxoя.
Tpc i i.ero логическо1 о г.леме1-1та И) И, в 1 орой илод iiepBOCo логическо1 о элеме1-1та 10 И соединен с выходок; третьего сумматора 2 и входо.м иеового нуль-органа 15, выход которого соединен с входом первого регулятора 14 положения, другой вход которого соедииен с выходам neiiBOi o логического эле;че1гга 10 И, зыход aepi-ioro регулятора 14 положения еоедипен с входом привода 8 иерво1 о маиину,. 1ятора, дру1 не вхо/ты которого соединены е выход.ами датчика 9 налй- шя раската в зоне и ервэго .манипулятора и бло1ча команды «Копе.., цикла, второй зход третьего , 1огическогэ элемента 10 И .и|.еи е выходом четвертого сумматора 2 и ВХО.1.0М второго иуль-органа 15, выход которого еоедине е пеовым входол: si Oporo ()е уля:тора 14 иоложеиия, Д ;угой вход которого еоединен с вь ходом логиче- cKoixj элемепга 10 И, выход iSTOporo регулятора 14 положения соединен е входом привода 8 второго манинулятора, другие входы которси о еоел,инены с вьг одамГ| датчика 9 ;laJцгнiя раската в зоне второго манииуля- i opa и б,:|ока команды «Конец цикла, вы- ходь первого н ьт(.)рого датчнков 16 ноло- .я крочкн Г|О.лос1,1 соедн1;ены с входами лятогс c MMH i4.i|)a 2, |;, хоторого соединен с первым входо.11 третьего еумматора 2, isTOpOH вход KOTOpOi o соедине е выходом ocbjiu)ro (етра 5 памят-i и иервы.х .м
го еоедннен е В1)1ход,(лм девято1Ч) leimeTpa 5 ламлти, третий вхо.ч четвертого суммг тора соел.инен с ii;jxo. iOM ijiec ior:) сумматора 2, входы KOTOpoi O еоедине; ы е вв1ходами треть- ег;) и четвертого л,атчнкоз 16 1оложепия Kpo.viK..; iiOjiCjCbi, трегий вход Г|)етье1 о су.мма- тора 2 соединен е выходом седьмо 0 региет- ра 5 намяти, вторые вхол,1 еедвмого, вось- .MOi o и девя ;ого pei истров 5 иа.мяти соединены е выходом б,лока 7 -/.viножения, входы r;t. iX)poi 0 еое.чинеиы с выходами б, юка зада- пия ноловины раее : ОЯ11ия меж.ау 1)еакциями опор ва,чков (не показан) и блока 6 деления, входы которого еое.;1инеиь1 с выхода.ми нер- в-огх) к второго коммутаторог) 3, четвертый ..т первого ко.ммутатора 3 еоединен е выходом второго регистра 5 намяти, пятый вход - с выходом ) регнетг;а о памяти 1 ;1еетой вход с выходом нервого регистра 5 ца:1 :яти, летвер ъш вхо.о. второго кс ммутчтора 3 соединен е выходом 1неетого ре иетра 5 иамятт1, гятый 5ход - - е выходом иятого регистра о мяти. И1естой вход -- с ВЫХОЛ.ОМ )Т ог(; 5 намяти. Ьтюк 4 формирова:-шя команд содержит формирователь 17 импульсов, вход которого является входом б, И),а, rpiiri-ep 18, дат чик 19 напразле 1ия вращения 1 алков прокатной к,:|ети, по.тесе.диненныч к тахогеле- patnpa 20, связанного с ;алом э;1ектродзи- гате.тя п|)ивода валков, Д1:а .югическнх э,те- MCH i a У И, В1; кл;оиа ч ;| Й2 н нотеннионен с выходом первого логического элемента 21 И, входы которого соединены с выхо дами датчика 19 направления вращения валков прокатной клети и формирователя 17 импульсов и прямым выходом триггера 18, второй выхол блока через выключатель 22 соединен с потенциометром 23, третий выход блока соединен с выходом второго логического элемента 21 И, входы которого соединены с выходом формирователя 17 импульсов и R-входом триггера 18, инверсный выход которого соединен с вторым входом второго логического элемента 21 И, третий выход которого соединен с вторым выходом датчика 19 направления врапдения валков прокатной клети.
Устройство работает следующим образом.
Перед прокаткой сближают включением нажимных механизмов прокатные балки и нагружают их максимальным усилием, которое развивают нажимные механизмы клети. В процессе нагружения измеряют усилия с помощью датчиков 1 усилия реакций опор и с помощью первого и второго сумматоров 2 вычисляют соответственно сумму ( х) и разность (ЛРд-) усилий, которые, например, при ручном замыкании выключателя 22 блока 4 формирования команд (например, тумблера) фиксируется в третьем и четвертом регистрах 5 памяти и при подаче сигнала «Нагружение («нагр.) на первые управляющие входы первого и второго коммутаторов 3 поступают на вход блока 6 деления, а затем и множительный блок 7, с помощью которых вычисляется смещением оси прокатки по формуле
оС
САР.
гдеДРх Я x-ft
2Р2..
- разность реакций опор левой (Рлх) и правой (Pn.v) стороны клети при нагружении па- жимным механизмом; С - расстояниемежду
реакциями опор.
Результаты вычисления 6 фиксируются в седьмом регистре 5 памяти при на личии ко.манды «Нагр. и оттуда передаются в третий сумматор 2.
Перед задачей полосы в клеть по команде «Конец цикла («КЦ), который формируется при окончании прокатки в клети предыдущего раската, в систему управления приводом манипуляторов 8 поступает сигнал на их разведенке, а при попадании раската в зону работы манипулятора датчик 9 наличия раската в зоне работы манипулятора дает команду «Центрирование («Центр.), по которой начинается их сведение.
В этот момент устройство вырабатывает команду «Первый пропуск («1 пр.), например, при наличии на всех входах второго логического элемента 10 И сигналов с датчика 11 наличия полосы перед клетью (например, фотореле) с датчика 12 направления
движения раската (например, включение подводящего рольганга «Вперед) и сигнала «КЦ. Команды поступают на второй вход логического элемента 13 ИЛИ, а оттуда па
первый вход третьего логического элемента 10 И.
По этой команде второй вход второго регулятора 14 положения привода 8 манипулятора, расположенного перед клетью, подключается через второй вход третьего логического элемента 10 И к выходу четвертого сумматора 2 и при наличии на его выходе задания второй нуль-орган 15 включает регулятор 14 положения в работу. При этом . на вход третьего сумматора 2 подаются сигналы с выхода шестого сумматора 2 и восьмого регистра 5 па.мяти. Сигнал с щестого сумматора 2 пропорциона,1ен асимметрии положен-ия кромок (5i). Входы щестого сумматора присоединены к выходам третьего и четвертого датчиков 16 положения правой
0 (5„;) и левой (SM) кромок полосы, расположенных перед клетью. Сигнал с выхода восьмого регистра 5 памяти пропорционален смещению оси прокатки (бл).
Таким образом, перед первым пропуском
5 второй регулятор 15 положения формирует управляющее воздействие, например, по закону
(Sl±f,),
гдеК - коэффициент пропорциональности;
0 5,(1)5,.цз)-5Aij2 - асимметрия в положении кромок полосы перед (1) и за (2) клетью относительно оси прокатки. В результате этого воздействия приводы
5 манипулятора 8 центрируют полосу до выполнения условия 5i(2)±6., после чего с помощью второго нуль-органа 15 второй регулятор 14 положения отключается, приводы второго манипулятора В останавливаются, но система управ,г1еппя манипулято рамп формирует уси,1ие па удержание раската в зафиксированном положении.
При задаче раската в клеть блок 4 формирования команд вырабатывает команды «Нечетный («Нечет.) и «Четный («Чет.)
г пропуски, при наличии которых в первом, шестом, втором и пятом регистрах 5 памяти фиксируются соответственно суммарное усилие и разность усилий реакций опор. После появлепия сигнала «Нечет, пропуск на первых управляющих входах первого и второго
Q коммутаторов 3 измеренные значения суммарного усп. щя (Р-г, ) и разности усилий (ЛР|) с выхода второго и niecToro регистров 5 памяти поступают в блок 6 деления, а зате.м в множительный блок 7, где па ос- новапии предыдущих вычислений, зафикси5 ровапных в седьмом регистре 5 па.мяти, вычисляется смеп1ение 6i полосы относительно осп прокатки длЯ последующего нечетного пропуска. В четных пропусках на вход блока 6 Ae;iefiHH поступают даы-пле с liepuoro и пятого регистров 5 памяти через первый и второй коммутаторы 3 при наличии на их третьих управляющих входах сигнала «Чет. Для вычисления смещения полосы откоси- телъно оси ирокатки используют выражение (приложение 1).
X ,С , ,л рл р pjij
-зЪ I р
гдеАР Рл| - Рп1 -- разность .ий опор
левой (г/,) и правой (РП ) сторон клети при прокатке по/юсы в i-e- четных пГ ОПУ-сках;
i-P.
Результаты вычислений фиксируются в третьем и четвертом peincT|}ax 5 ггамяти и передаются в третий и че вертый сумматоры 2. Если на их Езыходах изменяется значение б 1(2), то соответствуюпитй иу;1Ь-озган 15 включает регулятор 14 положеиия в работу и при1И)д 8 манииу.лятора 0 1работает возникшее рассог л а сование.
Во втором пропуске система работает аналогичным образом, при этом блоком 4 формирования команд формируется коман;1а «Чет. пропуск и воздействует на первый регулятор ноложе1шя через первый логический элемент 10 И. При это.м первый регу;1я- тор 14 положения .рует управление, нропорциональное сигналу, юступающему из третьего сумматора 2. В последующих нечетных пропусках ко.манда на первый вхо; третьего лоп-ческого элемеьгга 10 И поступает с первого выхода блока 4 фо)мирова1 ИГ1 комапд через первый вход логического элемента 13 ИЛИ.
Фо)мировапие сигналов «-leT. и «Нечет. фонуски осунлествляется следующим образом.
Ыа формирователь 17 импульсов из первого сумматора 2 .поступают сигпалы, про- порциопальные суммарпым усилиям прокатки, которые преобразуются в пря.моугольные импульсы и которые поступают на первые входы перв(Я о и второго логических э.чемен- тов 21 И н счетный вход триггера 1(3 блока формирования команд. Прямой выход три|-- гера 18 нодсоединен на третий вход первого логического элемента 21 И, а ; ;нверсный -- на аналогичный вход второго логического элемента 21 И. Вторые входы этих эле.ментог- присоедипепы к выходам датчика 19 направ- ;1ения вращепия ва.чков прокатной клеги, который прпеоедике) к якорю тахогенера- тора 20, рйсположенного на )5алу электродвигателя привода валков.
Сочетание импульсов от ф ор.мироиате- ля 17 имг ульсов, триггера 18 и л,а гчика 1Q направ.чения .чия валков на BXO;I,C :iO- гических элемептов 10 позволяет сформировать нечетные и четные имну- и сы. котор-je
О
0
5
0
0
поступают на нервый и второй входы блока 4 форм;фования команд.
Таким образом, в иредлагаемом изобретении снижается поперечная разнотолщин- ность полос за счет устойчивой и симметричной деформании металла в валках клети при несовнадении осей прокатки, полосы и средств контрО ЛЯ положения кромок полосы.
Контроль полосы производится иепос.редственно в клети при прокатке.
Улучи1ается стабилизация процессов нрокатки за счет симметричной деформации металла в валках, а также периодического контроля за возможными смещениями оси нрокатки и средств из.,ерения положения к)омок полосы.
Возникает воз.можность определения ве- личиь:ы CMeHj,eHHH нолосы перед и за клетью, пе п)ибегая к сложным устройствам конт- ро;1Я показаний датчиков положения кромок нолосы за счет измерения реакций опор нро- катных валков во время прокатки.
Упрощается построение устройств конт- ро.чя, так как используются для этих целей сущеетвуюьцие системы измерения усилий 1;г Окатки, которыми оспап.1аются реверсивные npOKaTHijie станы.
Нзобретение может найти применение на клетях реверсивных прокатных станов, в ТОЛ : числе на слябингам и то,лстолистовых станах горячей нрокатки
Формула изоорегения
I. Способ цептрирова; ия полосы преиму- Н1ественно на реверсивном толстолистовом прокатном стане, включающий измерение по.11ожения кромок но. юсы относительно OCF прокатки, измерение усилий реакций онор валков и воздействие на полосу в ноне- речном направлении в еторону, фотивопо- ложную ее с.мещения.. отличающийся тем, что, С целью снижения поперечной разно- толщинности полосы и обеспечения устойчивой дефор.мации металла в валках, перед прокаткой нагружают валки максимальным усилием и вычисляют смещение б.( оси прокатки по сЬормуле
.
00 : .1
разлость,
- сумма реакций опор левой и правой сторон клети при нагружении а ж и м н ы м м е X а н и 3 - MO.V-:;
-- расстояние .между реакциями опор, полосу перед г ервым и liTOpt.fM пропуска.ми с учетом вычисленного смешения оси нрокатки, определяют смеще- г1ие 6к2) полосы относяте льно оси прокатки для четных и нечетных пропусков из выра- 1;енпя
t:с , ,, ,1in В-1/-
- ка)(2)-Aj-,, iifji ;
о-х -
гдеДР.-/.-/,
...
где ДЯ|(2)А1(2)-РП 1(2) - разность реакций
опор левой и правой сторон клети при прокатке по- лосы в нечетпы.х и четных пропусках;
|(2)-Рл |(2)+ °л 1(2) -полное усилие
прокатки;
воздействуют отдельно на приводы манипуляторов, расположенных с передней и задней сторон клети, сигналами управления, определяемыми, например, по формуле
(2)A(5l(2)±6i(2)),
гдеК - коэффициент пропорциональности;
5(2)5/ 1(2)-5л.1(2) -значение асимметрии полосы от, носительно оси прокатки.
2. Устройство для центрирования полосы преимущественно на реверсивном толстолистовом прокатном стане, содержащее два датчика усилий реакций опоры валков, уста- новленных под правым и левым нажимными винтами, четыре сумматора, четыре датчика положения кромок полосы, расположенные перед и за клетью, и два коммутатора, два регулятора положен ия, выходами соединенные с приводами передних и задних мани- пуляторов, два логических элемента И, два датчика наличия раската в зоне работы манипуляторов и датчик наличия полосы перед клетью, отличающееся тем, что, с целью снижения поперечной разнотолщинности листа и обеспечения устойчивой деформации металла в валках, оно снабжено блоком формирования команд, двумя нуль-органами, двумя сумматорами, логическим элементом И, логическим элементом ИЛИ, блоком деления и множительным блоком, девятью ре- гистрами памяти, причем выход первого датчика усилия реакции опор валков соединен с входом первого и второго сумматоров, выход второго датчика усилия реакции опор валков соединен с вторыми входами первого и второго сумматоров, выход первого сум- матора соединен с первыми входами первого, второго и третьего регистров памяти и с входом блока формирования команд, выход второго сумматора соединен с первыми входами четвертого-, пятого и шестого регистров памяти, вторые входы первого и щестого регистров памяти соединены с первым выходом блока формирования команд, первыми входами первого и второго коммутаторов, первым входом седьмого регистра памяти и первым входом первого логического элемента И, вторые входы третьего и четвертого регистров памяти соединены с вторым входом блока формирования команд, вторыми входами первого и второго коммутаторов
0
0
5 0 5 п 5 0
и с первым входом восьмого регистра памяти вторые входы второго и пятого регистров памяти соединены с третьим выходом блока формирования команд, третьими входами первого и второго коммутаторов, первыми входами девятого регистра памяти и первым входом логического элемента ИЛИ, второй вход .которого соединен с выходом .второго логического элемента И, входы которого соединены с выходами датчиков наличия полосы перед клетью и направления движения раската и блока команды «Конец цикла, выход логического элемента ИЛИ соединен с первым входом третьего логического элемента И, второй вход первого логического элемента И соединен с выходом третьего сумматора и. входом первого нуль-органа, выход которого соединен с одним входом первого регулятора положения, другой вход которого соединен с выходом первого логического элемента И, выход первого регулятора положения соединен с входом привода первого манипулятора, другие входы которого соединены с выходами датчика наличия раската в зоне первого манипулятора и блока команды «Конец цикла, второй вход третьего логического элемента И соединен с выходом четвертого сумматора и входом второго нуль-органа, выход которого соединен с первым входом второго регулятора положения, второй вход которого соединен с выходом третьего логического элемента И, выход второго регулятора положения соединен с входом привода второго манипулятора, другие входы которого соединены с выходами датчика наличия раската в зоне второго манипулятора и блока команды «Конец цикла, выходы первого и второго датчиков положения кромки полосы соединены с выходами пятого сумматора, выход которого соединен с первым входом третьего сумматора, второй выход которого соединен с выходом восьмого регистра памяти и первым входом четвертого сумматора, второй вход которого соединен с выходом девятого регистра памяти, третий вход четвертого сумматора соединен с выходом щестого сумматора, входы которого соединены с выходами третьего и четвертого датчиков положения кромки полосы, третий вход третьего сумматора соединен с выходом седьмого регистра памяти, вторые входы седьмого, восьмого и девятого регистров памяти соединены с выходом блока умножения, входы которого соединены с выходами блока задания половины расстояния между реакциями опор и блока деления, входы которого соединены с выходами первого и второго коммутаторов, четвертый вход первого коммутатора соединен с выходом второго регистра памяти, пятый вход - с выходом третьего регистра памяти и шестой вход - с выходом первого регистра памяти, четвертый вход второго коммутатора соединен с выходом щестого регистра памяти, пятый вход - с выходом
пятого регистра памяти, шестой вход -- с выходом четвертого регистра памяти.
3. Устройство по п. 2, отличающееся тем, НТО блок формирования команд содержит формирователь импульсов, вход которого рвляется входом блока, триггер, датчик на- |правления вращения валков прокатной кле- ги, подсоединенный к якорю тахогенератора, |два логических элемента И, выключатель потенциометр, причем первый выход блока соединен с выходом первого логического Элемента И, входы которого соединены с вы
ходами датчика направления вращения валков прокатной клети и формирователя импульсов и прямым выходом триггера, второй выход блока через выключатель соединен с потециометром, третий выход блока соединен с выходом второго логического элемента И, входы которого соединены с выходом формирователя импульсов и / -входом триггера, инверсный выход которого соединен с вторым входом второго логического элемента И, третий вход которого соединен с вторым выходом датчика направления вращения валков прокатной клети.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения текущих координат металла на реверсивном прокатном стане горячей прокатки | 1977 |
|
SU686793A1 |
| Устройство для регулирования температуры прокатываемого металла на реверсивном стане | 1976 |
|
SU598671A1 |
| Устройство для управления манипуляторными линейками реверсивного прокатного стана | 1984 |
|
SU1217512A1 |
| Система регулирования натяжения полос | 1980 |
|
SU931254A1 |
| Устройство для компенсации эксцентриситета валков прокатной клети | 1990 |
|
SU1704871A1 |
| Система стабилизации размеров проката | 1985 |
|
SU1271601A1 |
| Устройство для компенсации эксцентриситета валков прокатной клети | 1985 |
|
SU1346288A1 |
| Устройство управления скоростным режимом группы клетей непрерывного прокатного стана | 1986 |
|
SU1397111A1 |
| Устройство для регулирования формы полосы при непрерывной прокатке | 1990 |
|
SU1685566A1 |
| Устройство для автоматического сопровождения сварных швов и останова реверсивного прокатного стана | 1977 |
|
SU743739A1 |

Изобретение относится к процессу обработки металлов давлением, т. е. к прокатному производству, и касается автоматического центрирования полос относительно оси прокатки преимущественно в реверсивных клетях прокатных и дрессировочных станов. Цель изобретения - снижение поперечной разнотолщинности листа при прокатке на толстолистовых прокатных станах и обеспечение устойчивой деформации металла в валках - достигается смещением полосы в поперечном направлении при отсутствии соосности между полосой, валками и средствами контроля при контроле смещения полосы непосредственно в клети стана. Контроль смещения оси прокатки осуществляется путем нагружения валков перед прокаткой максимальным усилием, развиваемым нажимным механизмом клети, определения суммы и разности усилий реакций опор при отсутствии полосы между валками и вычисления величины смещения оси. Контроль смещения полосы относительно оси прокатки осуществляют в процессе прокатки, для чего непосредственно перед прокаткой производят центрирование полосы, задачу ее в клеть, измерение разности и суммы реакций опор и вычисление смещения полосы относительно оси прокатки отдельно в четных и нечетных пропусках. Формирование управляющих воздействий на перемещение полосы в горизонтальной плоскости производится отдельно для приводов манипуляторов, расположенных с передней и задней стороны клети, а перемещение полосы в последующих четных и нечетных пропусках осуществляется с учетом вычисленного смещения. При этом на полосу действуют усилием, при котором не нарушается потеря ее устойчивости и которое не снимается при окончании центрирования полосы. 2 ил. Ф сл 4 tc со to о о
в
/7
РЛ
/////////////
CpLl.i
Составитель А. Сергеев
Редактор В. Ковту иТехред И. ВересКорректор В, Гирияк
Заказ 4467/11 Тираж 467Подиисное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
fl3035, Москва, Ж--35, Раушская изб., д. 4,5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
дзи.2
| Способ центрирования полосы | 1975 |
|
SU558732A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ автоматического фиксирования положения линейками манипулятора | 1974 |
|
SU498052A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ автоматического центрирования полосы на агрегатах резки и отделки проката | 1974 |
|
SU501789A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для измерения шириныполосовых материалов | 1973 |
|
SU508661A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для регулирования положения движущейся полосы | 1977 |
|
SU721147A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для автоматического центрирования полосы при прокатке | 1980 |
|
SU908450A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
