30
О|ргану. вследствие разжатия пружины 25. 25 пуса исполнительного органа, при этом
корпус исполнительного органа выполнен в виде двух планок, соединенных скалками, установленными параллельно одна другой, а механизм линейного перемещения выполнен в виде зубчато- реечной передачи, одна из зубчатых реек которой жестко связана с механической рукой, а другая вьтолнена на одном из упоров системы управления, а зубчатые колеса этой передачи установлены на оси корпуса исполнительного органа и отношение диаметров этих зубчатых колес равно тангенсу угла наклона поверхностей одного из копиров к плоскости перемещения механической руки относительно исполнительного органа.
Угол наклона поверхности 41 гори- з1онтального участка копира 27 и делительные диаметры зубчатых колес 21 и 22 зубчато-реечных передач подбираются таким образом, чтобы скорости исполнительного органа и корпуса 17 были равны. Таким образом, при движении исполнительного органа корпус 17 с деталью 42 относительно патрона обслуживающего станка остается в покое. При этом деталь 42 зажимается кулачками патрона, и захватное устройство 12 возвращается вместе с корпусом 17 в исходное положение.
Захватное устройство 12, возвра- щ{аясь в исходное положение, раскры35
40
37
ГО
(fu.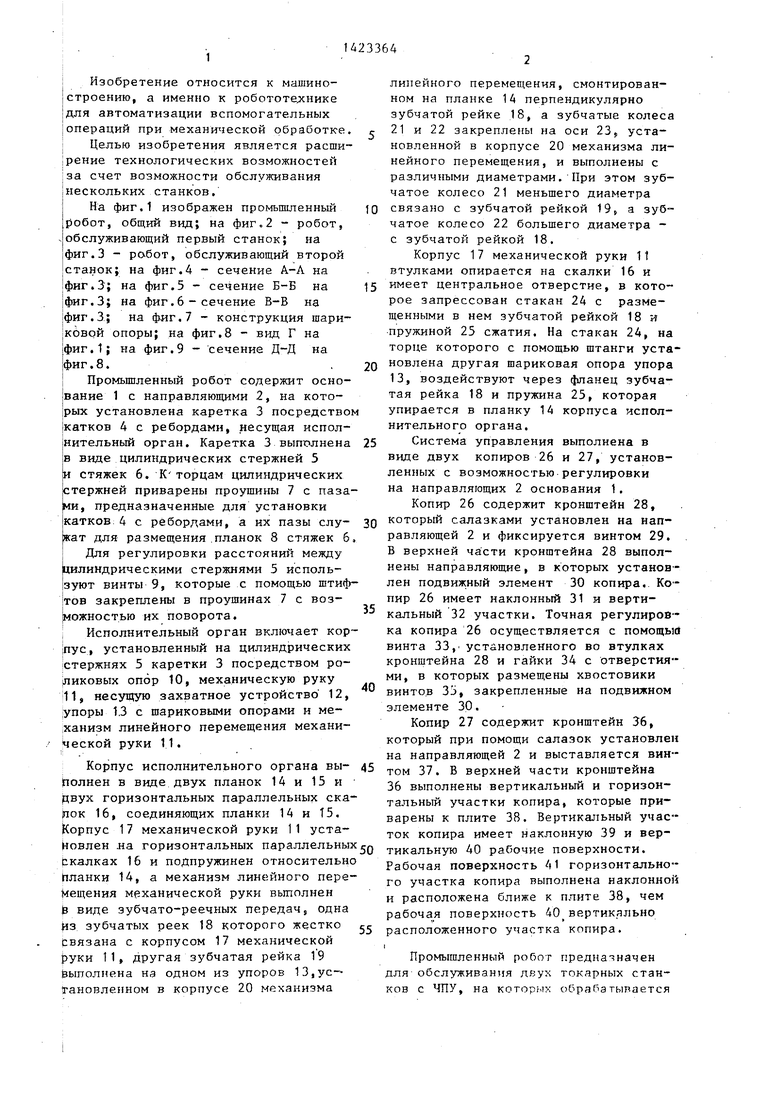

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1986 |
|
SU1371896A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Загрузочное устройство | 1985 |
|
SU1298038A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Автооператор | 1979 |
|
SU837755A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| АВТОМАТ ДЛЯ ШЛИФОВАНИЯ КАНАВОК И СПИНОК СВЕРЛ | 1971 |
|
SU295650A1 |

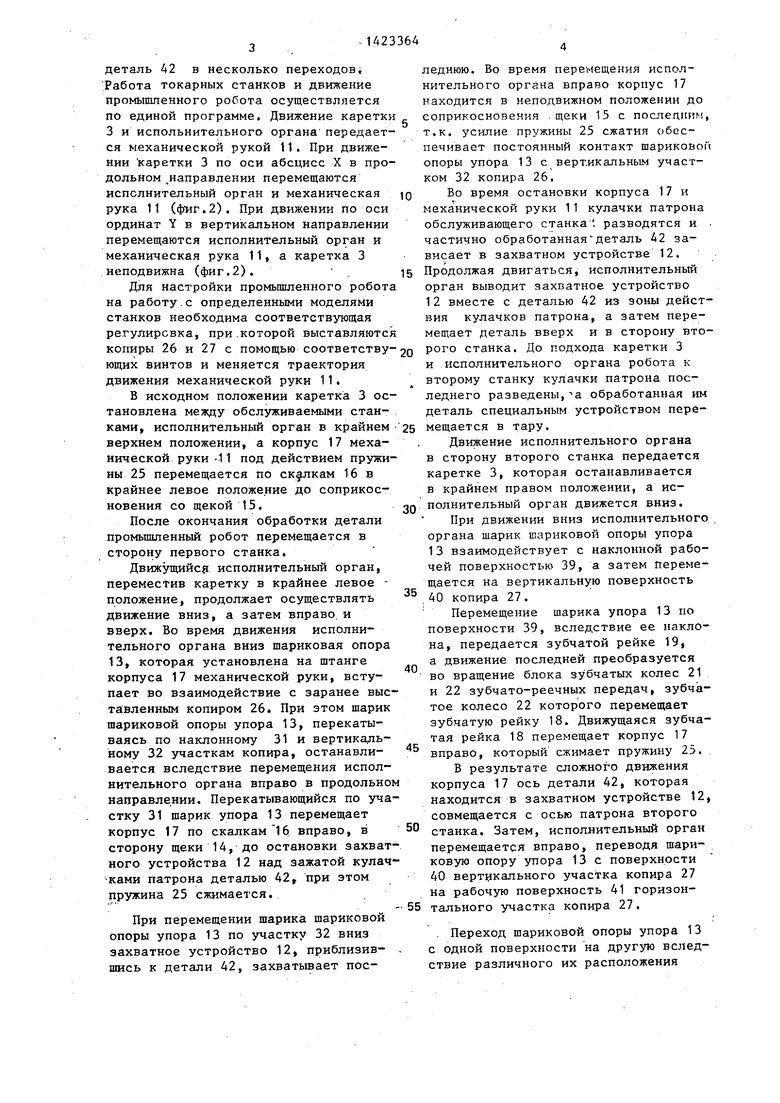
Изобретение относится к области машиностроения, а именно к робототехнике для автоматизации вспомогательных операций при механической обработке. Целью изобретения является расширение технологических возможностей за счет возможности обслуживания нескольких станков. В момент фиксации механической руки 11 над рабочей позицией останов каретки 3 не происходит, а корпус механической руки начинает перемещаться в направлении, противоположном направлению перемещения каретки 3, с той же скоростью за счет использования копира и механизма линейного перемещения механической руки в виде зубчато-реечной передачи. 9 ил. 
1
в 9 риг.5
S в
ера г. 6
6-6
(риг. 7
Л Д
дзи.З
duff Г пооррнуггтс
J/
иг. 8
| Манипулятор | 1974 |
|
SU547336A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
