//////
о со
о
OS
Фиг.1
Изобретение относится к пакетосбороч- Кым машинам и может быть использовано в пшлепой - промышленности па су- цильпых комплексах для пггабелирования загруженных снрьем поддонов на тележку, а именно в п1табелиру1О1цих устройствах, где требуется обеспечить падежный с двух Сторон подхват штабелируемого предмета ррузонесушими подвесками в начале процесса и предохранить штабель от деформации при выходе его за пределы шта- белера.
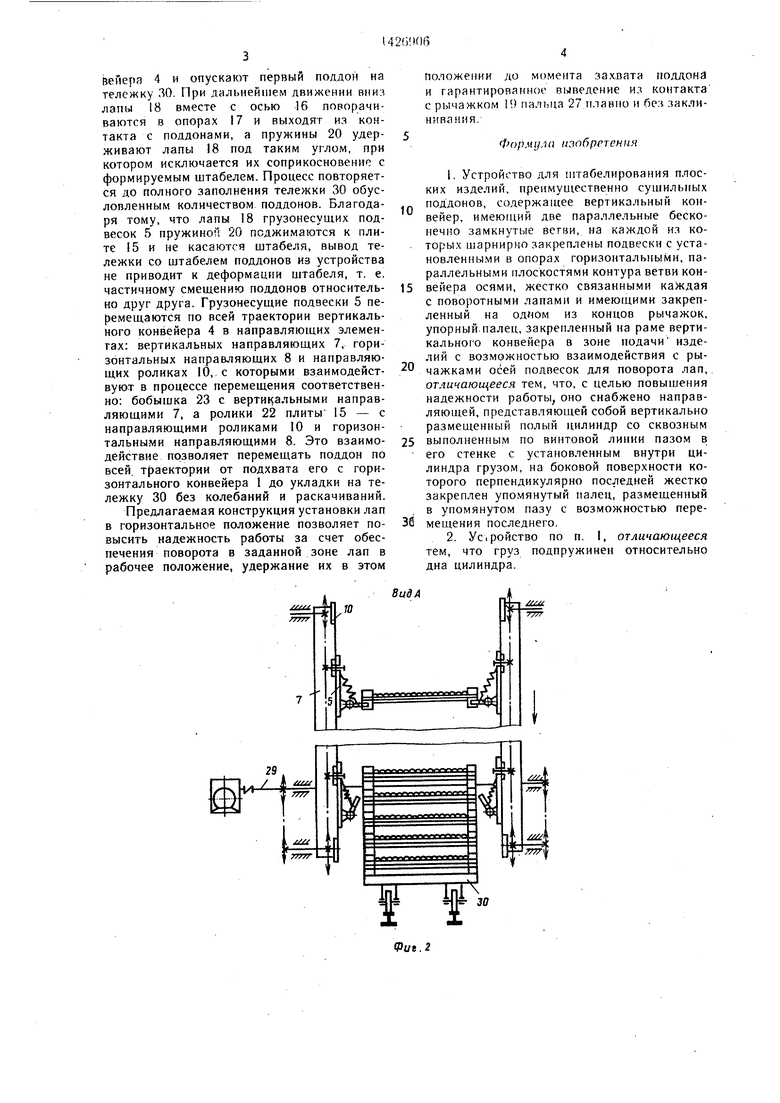
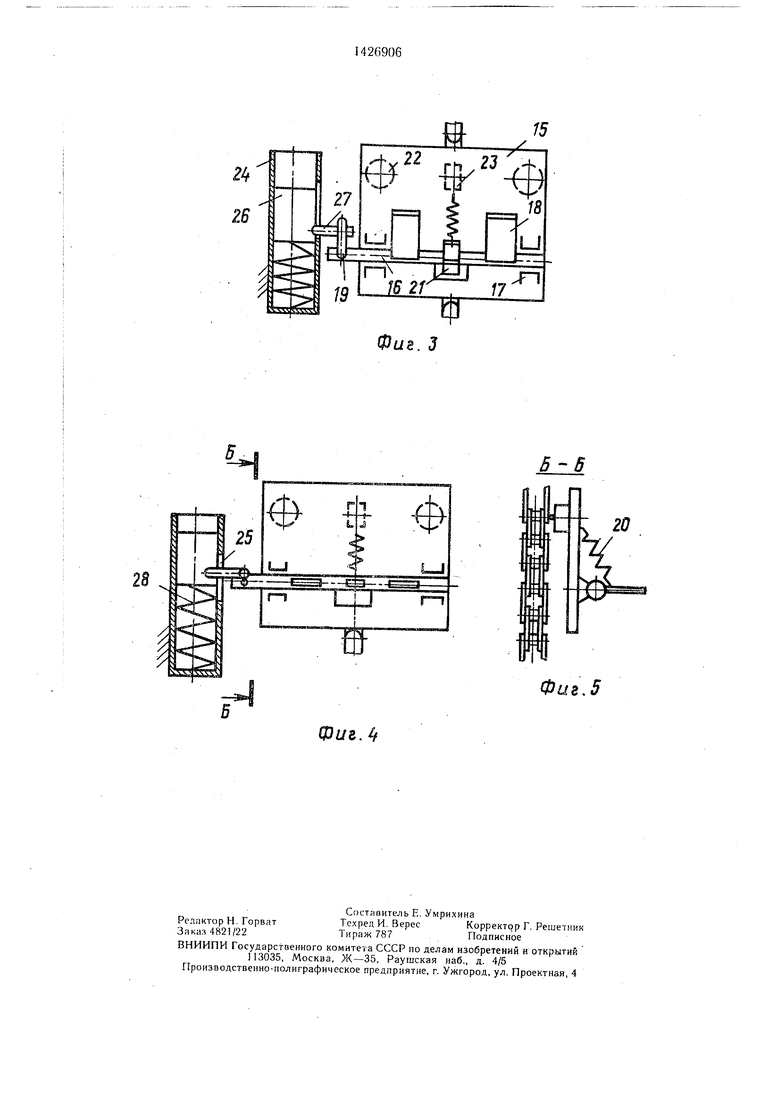
; 11,ель изобретения - повышение надежности работы.; На фиг. 1 схематически изображено устройство, вид сбоку; на фиг. 2 - вид А На фиг. 1; на фиг. 3 - грузонесу- |дая подвеска в -начале взаимодействия с механизмом подвижного упора; па фиг. 4 - грузонесущая подвеска, и механизм подвиж- iHoro упора ао время установки лап в го- ;ризоптальное положение; на фиг. 5 - сече- iime Б-Б на фиг. 4.
Устройство содержит горизонтальный ;цепной конвейер 1 с неподвижным упором 2 для подачи поддонов 3 и вертикальный конвейер 4 с двумя бесконечными па- раллельпыми цепями, на которых на полу- осях шарпирно закреплены грузонесущие подвески 5, а также установленные на ста- : нине параллельно восходящим ветвям вертикального конвейера 4 два механизма 6 : поворота лап, вертикальные направляющие 7 и горизонтальные направляющие 8. Рядом с копсольно установленными отклоняющими звездочками 9 вертй кального конвейера установлены направляющие ролики 10 таким образом, что их оси находятся в одной горизонтальной плоскости с осью соответствующей отклоняющей звездочки 9.
На горизонтальном конвейере 1 установлен рычаг блокировки 11, приводимый тянущим электромагнитом 12, работающим по сигналу от конечных выключателей 13 и 14.
Каждая грузонесущая подвеска содержит плнту 15 и ось 16, имеющую возможность поворота в опорах 17, лапы 18 и рычажок 19, жестко соединенный с осью 16, пружину растяжения 20, связывающую плиту 15 и ось 16, а также ограничитель поворота 21 лап 18.
Кроме того, на плите 15 на стороне, обращенной к цепи, смонтированы два ролика 22 и прямоугольная бобышка 23, жестко связанная с плитой 15.
Механизм 6 поворота лап состоит из полого цилиндра 24, снабженного сквозным пазом 25, выполненным по винтовой линии, контргруза 26 и жестко связанного с ним пальца 27, имеющего возможность перемещения по пазу 25, а также аморти- затора 28.
Г1ривод вертикального конвейера 4 осуществляется электродвигателем и редукто
0
5
0
5
(
5
5
0
ром через распределительный вал 29 (при вод горизонтального конвейера не показан).
Штабелирование поддонов 3 прои.яводит- ся на тележку 30 и после набора njTa- беля из 25 поддонов тележка 30 выкатывается из штабелера и закатывается в туннельную сушилку.
Устройство работает следующим образом.
При включении приводов начинают работать горизонтальный конвейер 1 и вертикальный конвейер 4. Поступающий на конвейер 1 пустой поддон 3 загружается сырьем, проходя под устройством для за- грузки поддонов |(не показано), и доходит до рычага блокировки 1, где оста- навливается, ожидая подхода пары грузоне- сущих подвесок 5 и воздействуя на конеч; ный выключатель 13, дающий электрический сигнал на тянущий электромагнит 12. Грузонесущие подвески 5 при своем перемещении воздействуют на конечный выключа-. тель 14, который подает второй сигнал на электромагнит 12, который после получения второго сигнала срабатывает и поворачивает рычаг блокировки 11, пропускающий поддон до упора 2 в зону перемещения подвесок 5.
Скорости вертикального конвейера 4, горизонтального конвейера 1,расстояние между подвескам1 5 и расположение конечных вы- ключа елей 13 и 14 выбраны так, чтобы совместные сигналы от конечных выключателей держали рычаг блокировки 11 повернутым и позволяли поддону 3 дойти до упора 2 до подхода очерёдной пары подвесок 5.
При дальнейшем перемещении по восхо- дящим ветвям вертикального конвейера 4 грузонесущие подвески 5 своими рычажками 19 .упираются в пальцы 27 механизмов 6 поворота лап, под воздействием которых поворачивают в опорах 17 ось 16 с лапами 18, которые устанавливаются в горизонтальном положении и в этом положении фиксируются ограничителем поворота 21.
Находящиеся в горизонтальном положении лапы 18 грузонесущих подвесок подхватывают поддон 3, а пальцы 27, ведомые рычажками 19, некоторое время перемещаются по пазу 25 цилиндра 24. При дальнейшем движении подвесок 5 пальцы 27 выходят из зацепления с рычажком 19 и благодаря контргрузу 26 возвращаются в исходное положение, а амортизатор 28 смягчает падение контргруза 26.
К выходу пальцев 27 и рычажков 19 КЗ зацепления друг с другом лапы 18 успевают подхватить поддон. Принудительное от пальцев 27 горизонтальное положение лап 18 грузонесущих подвесок гарантирует своевременный и правильный с двух сторон подхват поддона.
Грузоиесущие подвески 5 переносят поддон на нисходящую ветвь вертикального конВ ид А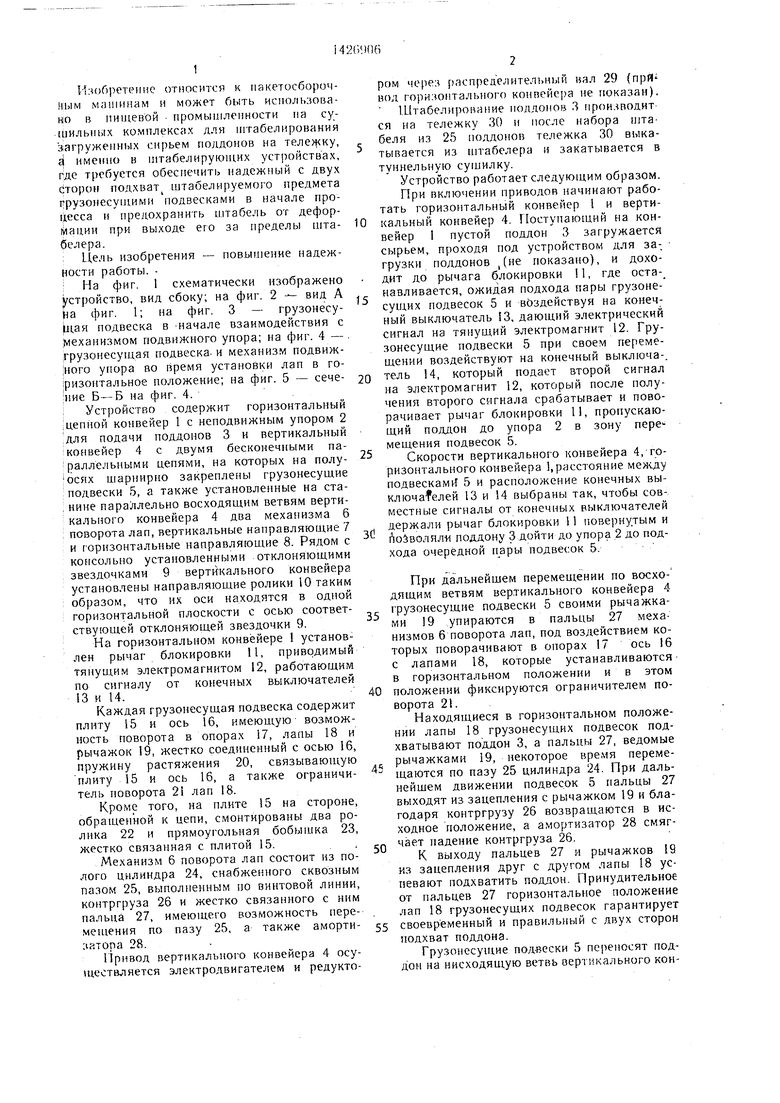
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Устройство для навешивания и съема крупногабаритных изделий с грузонесущих подвесок подвесного конвейера | 1980 |
|
SU956385A1 |
| Линия для химической и термической обработки изделий | 1982 |
|
SU1039841A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| ЛИНИЯ НАБОРА НОСЫЛОВ ПЕЧАТИ В ГАЗЕТНО- ЖУРНАЛЬНЫХ ЭКСПЕДИЦИЯХ | 1972 |
|
SU341540A1 |
| Установка для разгрузки грузов | 1979 |
|
SU819023A1 |
| Подвеска грузонесущего конвейера | 1982 |
|
SU1022886A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ, ОБЖИГОВАЯ МНОГОЩЕЛЕВАЯ ШАХТНАЯ ПЕЧЬ ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ И СУШИЛЬНАЯ КАМЕРА ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 1993 |
|
RU2046708C1 |
| Подвесной грузонесущий конвейер | 1977 |
|
SU745801A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |

1л1
f
30
Zii ,6
Фиг.
Фие. 3
6-6
20
Фиг.5
| Устройство для сборки ящиков в стопки | 1973 |
|
SU611838A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
