(Л
5
1
со
со со
; Изобретение относится к обработке
;металлов давлением, в частности к гибке
профиле и:5 т 1убных заготовок и может
быть использовано, ианример. для гибки
деталей товаров народ110|-о иогреб.юния
из цветных енлавов.
Цель изобретения -- повьннение надежности в работе.
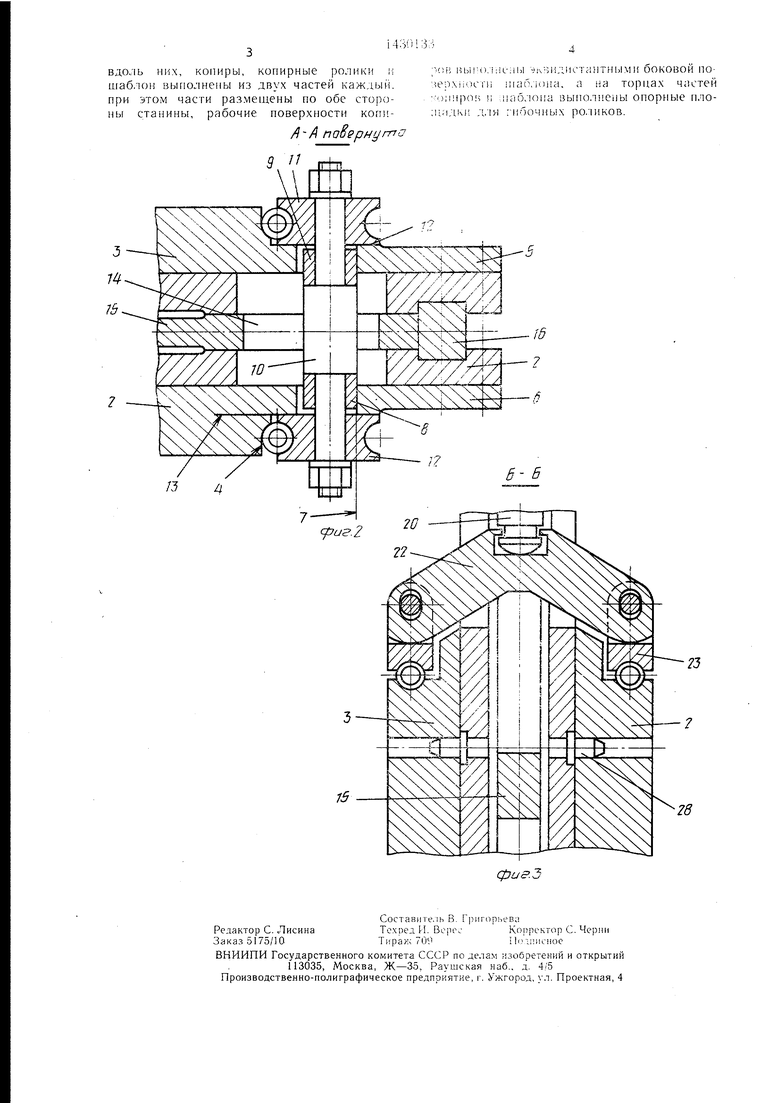
На фиг. 1 схематически изображено предлагае.мое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Устройство для гибки труб содержит неподвижно закрепленные на станине 1 части 2 и 3 гибочного шаблона с рабочими поверхностями в виде канавок, имеющие срез 4 в месте перехода профильного ручья в прямой участок. По обе стороны частей гибочного наблона ненодвижно установлены на станине 1 части 5 и б копиров. Части 2 и 5 закреплены на одной плоскости станины 1, а части 3 и,6 -- на противоположной. Части 5 и 6 копира имеют боковые конирные нове)хности 7, эквидистантные боковым рабочим новерхнос- тям наблона и служанше для поддерживания частей 8 и 9 коиирного ролика. Части копирных роликов установлены на осях К), на которых также CMOHTiipOBa- ны гибочные ролики 11. На торнах частей копиров и Н1абл011а выно, онорные площадки 12 и 13 для гибочных роликов 11. Оси 10 разме1нены в горизонтальных назах 14 траверсы 15, установленной между направляющими 16 станины 1. С помон1ью Т-образного паза 17 траверса 15 связана со пггоком 18 силового цилиндра 19. Устройство содержит также прижим в виде связанного со HITOKOM 20 силового цилиндра 21 коромысла 22 с niap- нирио установленными на его концах зажимами .23. Кроме того, на станине 1 для установки заготовок 24 имеется упор 25 с опорными пластинами 26, иарнирно ус- танов.ченными на упоре с возможностью по- iopora и возврата в исходное положепие до о|-раничителя с помощью пружины (не ноказаны). Опорная пластина служит дополнительной- онорой для заготовки. Цилиндры 19 и 21 управляются трехпози- ционным краном 27 носледователыюго действия (трубопроводы и иневмомагистра- ли не изображены). Части гибочного Н1аб- лона и копиров установлены на станине с помощью пальцев 28 и 29 и болтов 30 и могут быть при необходимости заменены. Цри этом заменяются также и гибочные ролики 11.
Устройство работает следуюни м об)азом.
Заготовки 24 устанавливаются на горизонтальные участки ручьев частей гибочного шаблона и онорные пластины 26 и досылаются до упора 25. Рукояткой крана 27 управления включается цилиндр 21, щток 20 которого, выдвигаясь, перемещает
0
0 5 0
0
5
коромысло 22 с зажимами 23 вниз, фижимая заготовки к ручьям щаблона. Дальнейщим поворотом рукоятки крана управления включается цилиндр 19, HJTOK 18 которого, воздействуя на траверсу 15, перемещает ее вниз по нанравляюй,им 16. При это.м стенки пазов 14 воздействуют на оси to, которые перемещаются вниз одновременно с траверсой. На первом этапе перемещения части 8 и 9 копирных ро.тиков контактируют с боковы.ми кромками пшб.юна. Затем гибочные ролики 11, нереместивщись до касания с заготовка- .ми 24, отжи.мают части 8 и 9 копирных роликов до касания ими поверхностей 7. Тем самым обеспечивается необходимая траектория неремещения гибочных роликов, обкатывающих заг отовки относительно гибочного 1паблона. При это.м конец каждой заготовки нажимает на опорную пл&с- тину 26, поворачивает ее на оси и неремещается в вертикальной плоскости до окончания процесса гибки, а пластина 26 возвращается в исходное положение. Затем последовательным включением с помощью крана управления механизмы возвращаются в исходное положение: сначала возвращаются гибочные ролики, после чего механизм прижима освобождает готовые детали. Съем готовых деталей производится вручную перемещением детали вверх и в сторону.
Предлагаемое устройство вследствие по- вьинения жесткости и наличия направляющих для траверсы и гибочпых роликов надежно в работе и характеризуется сокрац1,е|-|ием металлоемкости станка на 20- 30%; сокранхением габаритов на 10-15%, а также сокращением хода щтока цилинд ра механизма прижима в результате -применения раздельного привода и неполного профиля ручья шгибочного щаблона. Указанные преимущества выявлены в результате опытных проверок экспериментального образца устройства при изготовлении трубчатых деалей из алюминиевых сплавов хозяйственной сумки-тележки типа СТ-2.00.
Формула изобретения
Устройство для двусторонней гибки труб, содержащее закрепленные неподвижно на станине гибочный н1аблон с двумя рабочими поверхностями и размещенные по обе стороны от щаблона копиры с боковыми конирными поверхностями, а также траверсу, несущую две параллельно раз.мешенные оси с двумя гибочными и копирными роликами, отличающееся тем, что, с целью повышения надежности и уменьщения габаритов устройства, станина снабжена направляющими для траверсы, в траверсе вьнюлнень горизонтальные пазы, оси роликов установлены в горизонтальных пазах траверсы с возможностью перемещения
15
28
фиа.-.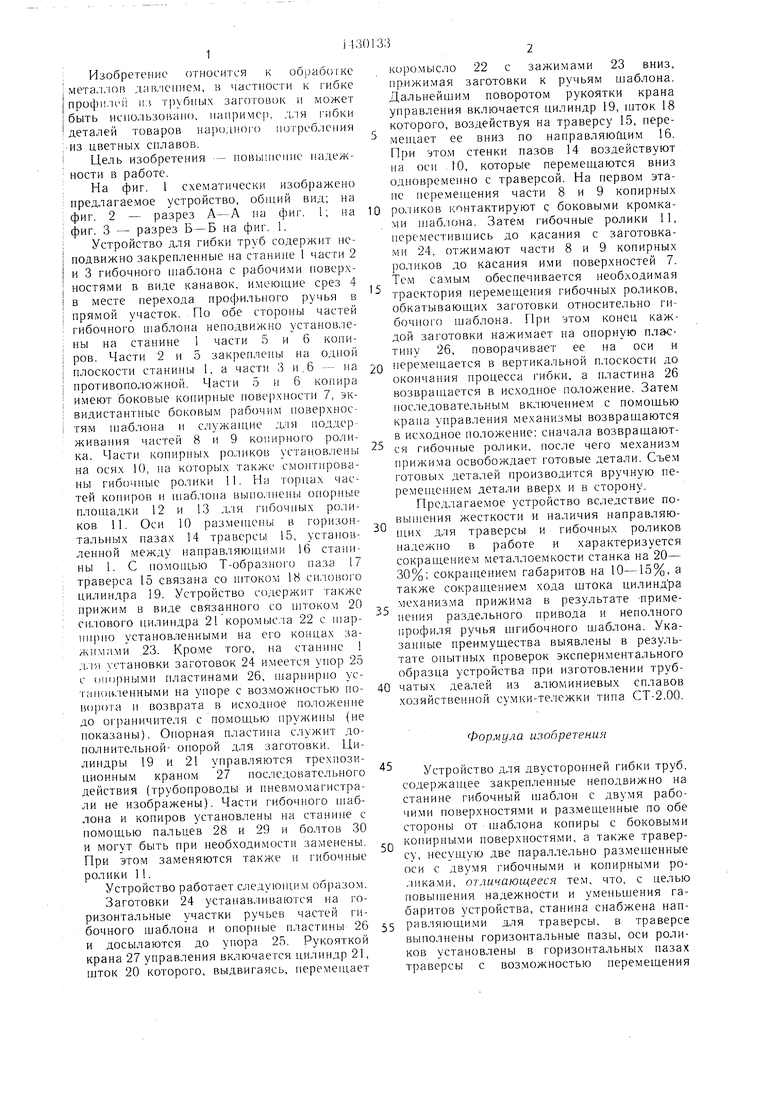
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибочный станок | 1976 |
|
SU601066A1 |
| Трубогибочный станок | 1984 |
|
SU1378982A1 |
| Полуавтомат для пространственной гибки труб | 1986 |
|
SU1378985A1 |
| Трубогибочный станок | 1980 |
|
SU940912A1 |
| Станок для двусторонней гибки деталей из труб | 1981 |
|
SU997904A1 |
| Машина для гибки труб | 1975 |
|
SU564044A1 |
| Устройство для гибки длинномерных изделий | 1988 |
|
SU1538953A1 |
| Станок для гибки длинномерных заготовок | 1984 |
|
SU1297966A1 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГИБКИ ЭЛЕМЕНТОВЗМЕЕВИКОВ | 1971 |
|
SU295590A1 |
| Трубогибочный комплекс | 1987 |
|
SU1470389A1 |

| Устройство для изготовления деталей гибкой | 1979 |
|
SU880558A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
