2 J
в
12
со 00
00 со
I Изобретение относится к области роботостроения и предназначено для механизации и автоматизации технологических процессов. Целью изобретения является повышение надежности работы за счет увеличения |усилия трогания с места. I На чертеже изображена схема руки Промышленного робота.
Схема содержит основной цилиндр 1 циаметра D, в нем помешен поршень 2, «естко связанный с полым штоком 3 гиаметра d. К основному цилиндру 1 оаксиально пристыкован дополнительный :иловой цилиндр 4, в котором находится юршень 5. На конце полого штока 3 ыполнена расточка, в которой находится :оршень 6 захватного устройства, шток .оторого оснащен коническим толкателем 7. Ълкатель 7, воздействуя на ролик захват- ого устройства, приводит/ в действие схват , который, схватывая заготовку, переме- цает ее на поддон 9. Рука содержит акже фланец 10 и пружины 11, 12.
Рука промышленного робота работает ледуюшим образом.
При подаче рабочей среды в одну из юлостей основного цилиндра 1 (например, 1евую) nopnieHb 2 и связанный с ним пток 3 перемещаются из крайнего левого 1 крайнее правое положение до упора в ||цток поршни 5, имеющего на торце пазы. : При подаче рабочей среды в правую 1| олость пневмоцилиндра 4 происходит сле- Аующее. Рабочая среда воздействует одновременно через пазы между поршнями FJ пазами на торце штока поршня 5
0 с 0
5
0
на поршень 5 и на поршень 2 основного цилиндра 1.
Одновременное воздействие поршня 2 основного цилиндра 1 и поршня 5 продолжается до тех пор, пока поршень 5 не упрется во фланец 10.
Захватное устройство работает следую- шим образом. Рабочая среда подается на поршень 6 захватного устройства. Поршень 6, преодолевая сопротивление пружины 11, перемещает вправо конический толкатель 7, который при перемеш,ении воздействует на ролик схвата 8.
Схват 8, сжимая пружину 12, обеспечивает перемещение изделия на поддон 9 при движении поршня 2 и связанного с ним штока 3 в левую сто рону.
Формула изобретения Рука промышленного робота, содержа- ц;ая основной силовой цилиндр выдвижения руки с подводимой к нему рабочей средой, ме.ханизм выдвижения схвата, схват, отличающаяся тем, что, с целью повышения надежности работы за счет увеличения усилия трогания с места, она снабжена дополнительным силовым цилиндром, поршень которого установлен с зазором коаксиально поршню основного силового цилиндра и направлен в противоположную сторону, при этом между поверхностями штока дополнительного силового цилиндра и поршня основного силового цилиндра, обращенным одна к другой, выполнены пазы для подвода рабочей среды, а механизм выдвижения схвата расположен в штоке основного силового цилиндра.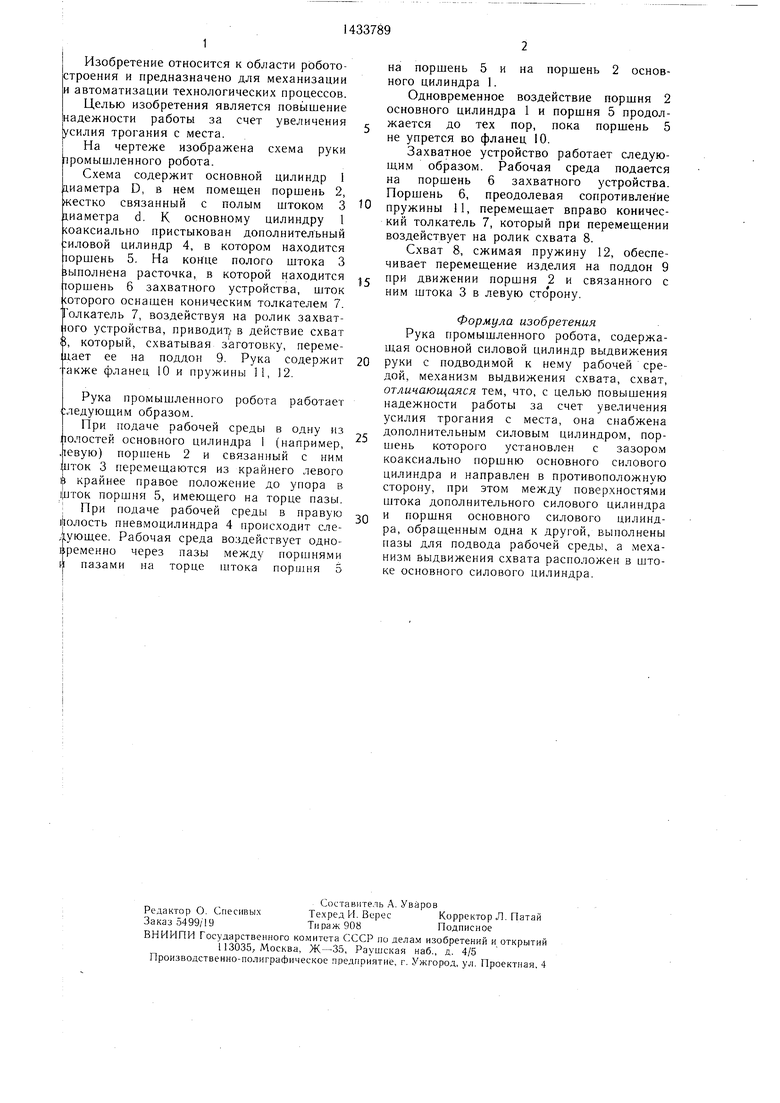
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1990 |
|
SU1756143A1 |
| Промышленный робот | 1980 |
|
SU905057A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука промышленного робота | 1979 |
|
SU776913A1 |
| Промышленный робот | 1986 |
|
SU1368166A1 |
| Промышленный робот | 1986 |
|
SU1335446A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
Изобретение относится к работо- строению и предназначено для механизации и автоматизации технологических процессов. Целью изобретения является повышение надежности в работе за счет увеличения усилия трогания с места. При подаче рабочей среды в правую полость дополнительного силового цилиндра 4 она воздействует на поршень 5 этого цилиндра и поршень 2 основного цилиндра 1. Происходит перемещение штока 3 вместе со схватом 8 влево. При этом на протяжении пути 1 на подвижные элементы руки воздействует бо.тьшее усилие. При подаче рабочей среды в левую полость цилиндра 1 происходит перемешивание поршня 2 вместе со схватом 8 вправо. 1 ил.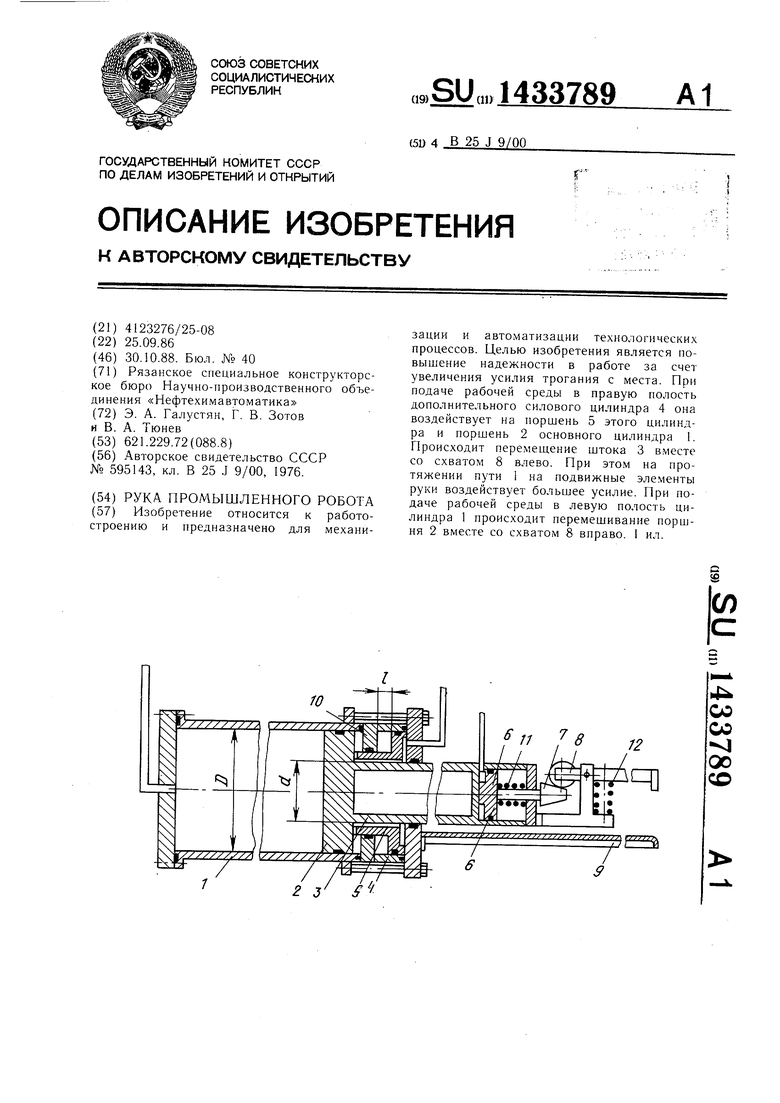
| Рука циклового робота | 1976 |
|
SU595143A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
