-J(
./ /
/ ы
4;
00
00 00
23
включается цилиндр 1 и перемещает К 7, 8 с шиберами, которые сталкивают груз с конвейера. В конце сталкивания К 7, 8 через упоры 6 упираются в Т 18. Последняя, перемещаясь по Н 9, 10, своими пальцами 20, 22 воздействует на пазы 14, 16. В результате Н 9 с шибером повернется по часовой стрелке, а Н 10 с шибером - против часовой стрелки. При переключении цилиндра 1 шиберы в повернутом положении возвратятся в исходное положение. При взаимодействии щеки 3 через упоры 5 на Т 17 последняя переместится на Н 9, 10. При взаимодействии пальцев 19, 21 с пазами 13, 15 Н 9 с шибером повернется против часовой стрелки, а Н 10 с шибером - по часовой стрелке. Шиберы вернутся в исходное положение для сталкивания грузов с конвейера. 7 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сталкиватель | 1988 |
|
SU1528709A1 |
| Устройство для передачи штучных грузов с одного конвейера на другой | 1980 |
|
SU967929A1 |
| Автомат для установки упругих колец в наружные канавки базовых деталей | 1980 |
|
SU904972A1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| Устройство для сталкивания штучных грузов с конвейера | 1980 |
|
SU901193A1 |
| МАШИНА ДЛЯ ПАКЕТИРОВКИ И ОБВЯЗКИ ПРОВОЛОКОЙ, НАПРИМЕР, СОРТОВОГО ПРОКАТА | 1996 |
|
RU2100112C1 |
| Устройство для подачи штучных заготовок в зону обработки | 1976 |
|
SU607625A1 |
| Сталкиватель груза к вилочному погрузчику | 1976 |
|
SU614023A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Устройство для укладки штучных грузов в пакет | 1984 |
|
SU1207952A1 |
Изобретение предназначено для передачи штучных грузов с конвейера на конвейер и позволяет повысить надежность работы. Сталкиватель включает направляющие (Н) 9, 10, на которых подвижно смонтированы связанные между собой каретки (К) 7, 8. Последние соединены с силовым цилиндром 1. На К 7, 8 прикреплены шиберы, которые имеют механизм поворота с соединением спиральный паз - палец. Для удержания шиберов в повернутом положении на них предусмотрены противовесы. Механизм поворота выполнен в виде траверс (Т) 17, 18, установленных на концах Н 9, 10 с возможностью перемещения вдоль последних и взаимодействия с К 7, 8 через упоры 5, 6 связывающих их щек 3, 4. Пальцы 19-22 закреплены на Т 17, 18, а пазы 13-16 выполнены на Н 9, 10, смонтированных в подшипниках 23. В исходном положении К 7, 8 с щиберами находятся в крайнем левом положении. При подходе груза на конвейере к месту сталкивания. g (Л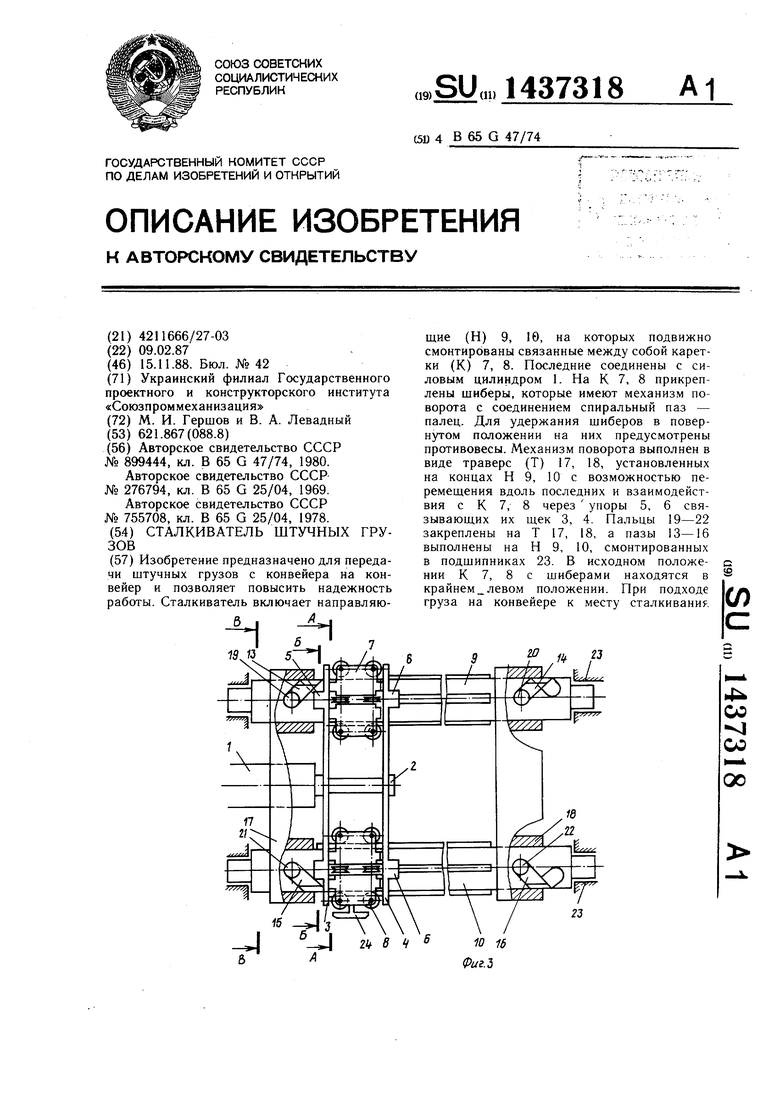
Изобретение относится к механизмам, используемым для передачи штучных грузов с конвейера на конвейер.
Целью изобретения является повышение надежности работы устройства.
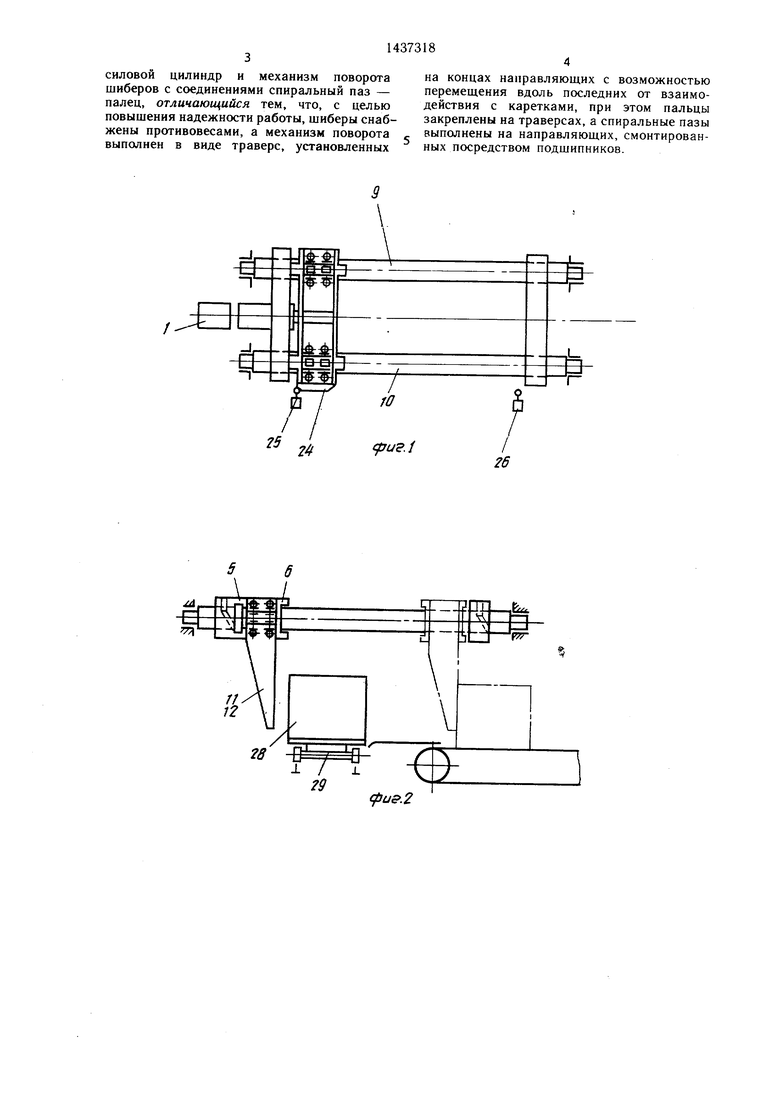
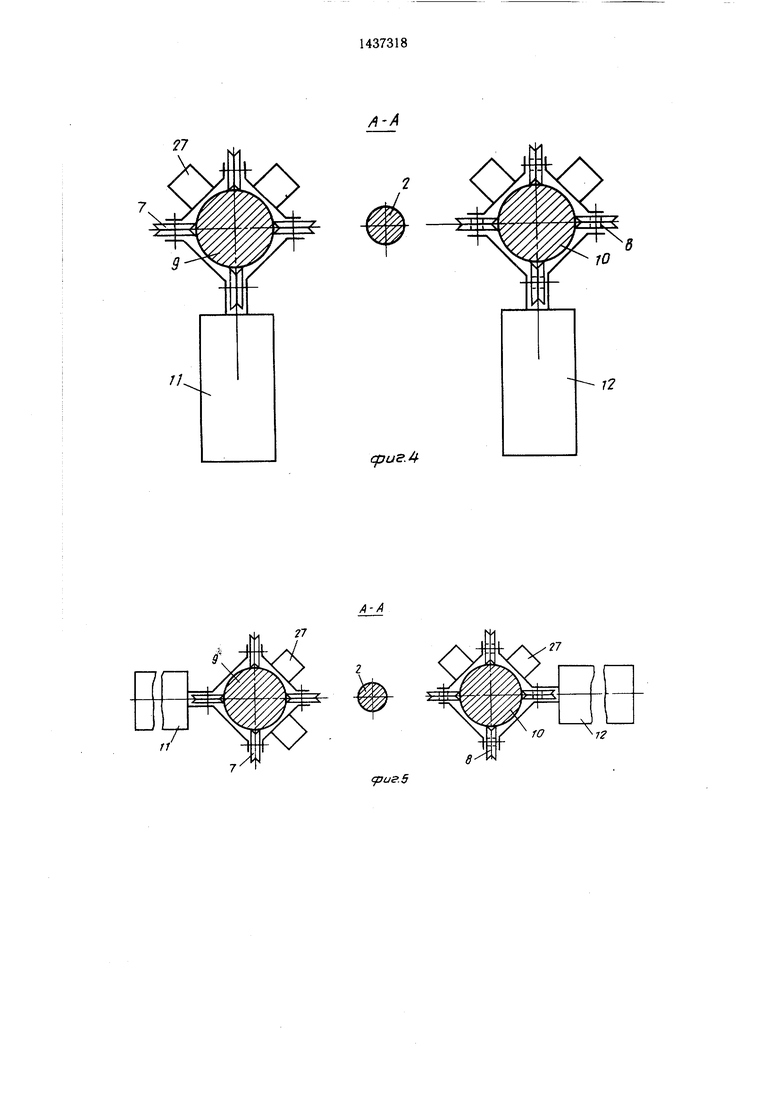
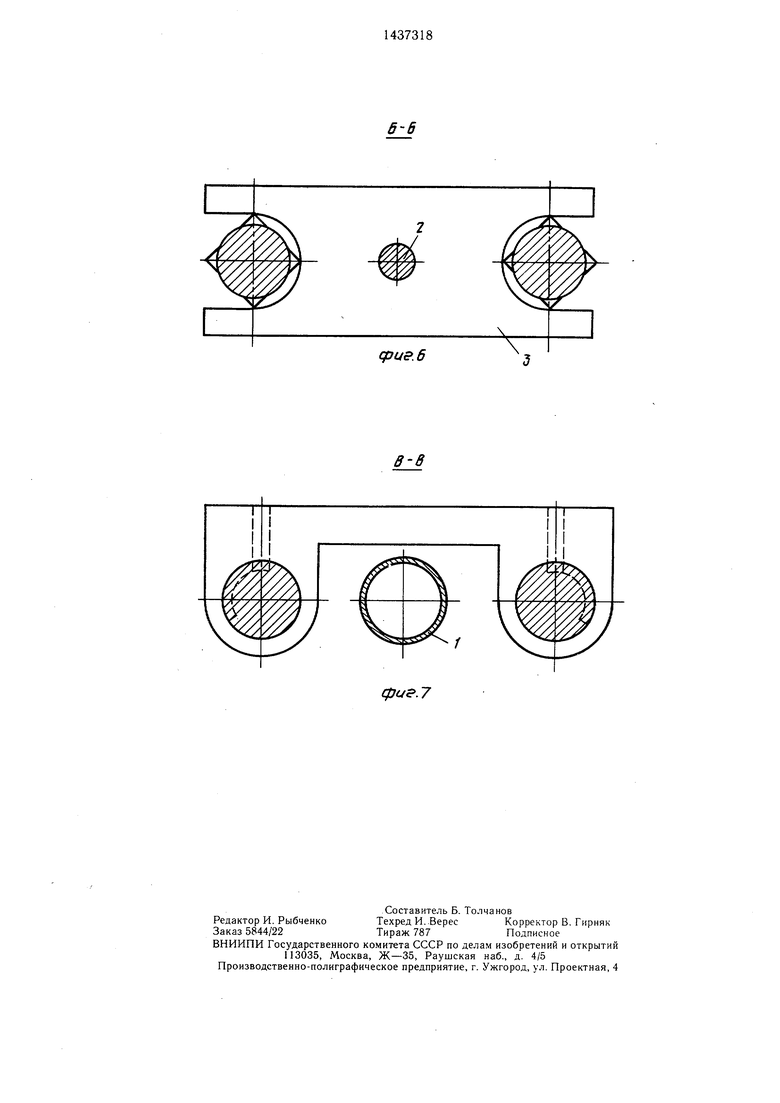
На фиг. 1 изображен предлагаемый сталкиватель, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - сталкиватель, вид сверху, с вырезом; на фиг. 4 - разрез А-А на фиг. 3, с шиберами в рабочем положении; на фиг. 5 - то же, с шиберами в нерабочем положении; на фиг. 6 - разрез Б-Б на фиг. 3; на фиг. 7 - разрез В-В на фиг. 3.
Сталкиватель содержит силовой цилиндр (пневмоцилиндр) 1, шток,2 которого прикреплен к ш,екам 3 и 4, имеющим упоры 5 и 6 (фиг. 3). Между щеками 3 и 4 свободно расположены каретки 7 и 8, перемещающиеся по направляющим 9 и 10. К. каретке 7 прикреплен шибер 11, а к каретке 8 - шибер 12. Направляющая 9 снабжена передним 13 и задним 14 левыми спиральными пазами, а направляющая 10 снабжена передним 15 и задним 16 правыми спиральными пазами. На направляющих 9 и 10 размещены траверсы 17 и 18 с пальцами 19, 20 и 21, 22. Траверсы 17 и 18 с пальцами 19- 22 и пазы 13-16 направляющих 9 и 10 представляют механизм поворота шиберов. Направляющие 9 и 10 размещены в подшипниках 23. Изменение направления движения сталкивателя осуществляется поочередной подачей сжатого воздуха в переднюю или заднюю полость пневмоцилинд- ра 1 благодаря воздействию линейки 24 на тормозной золотник 25 или 26. Для удержания щиберов 11 и 12 в повернутом положении предусмотрены противовесы 27. Груз 28 подается на конвейере 29 к месту сталкивания.
Сталкиватель работает следующим образом.
В исходном положении шиберы 11 и 12 находятся в своем крайнем левом положении. При подходе груза 28 на конвейере
29 к месту сталкивания воздух подается в заднюю полость пнвмоцилиндра 1 и шток 2 начинает выдвигаться. Одновременно с выдвижением штока начинают перемещаться
каретки 7 и 8, которые передают шиберам 11 и 12 поступательное движение, в результате чего груз 28 начинает сталкиваться с конвейера 29. Перед концом сталкивания щека 4 своими упорами 6 упирается в траверсу 18, которая получает перемещение вдоль направляющих 9 и 10 и своими пальцами 20 и 22 воздействует на спиральные пазы 14 и 16, в результате чего направляющая 9 с шибером 11 поворачивается по часовой стрелке,
5 а направляющая 10 с шибером 12 поворачивается против часовой стрелки. В конце хода линейка 24 воздействует на тормозной золотник 26, который переключает сжатый воздух в переднюю полость пнев- моцилиндра 1, в результате чего шиберы
0 11 и 12 в повернутом положении перемещаются в исходное положение, проходя при этом над очередным грузом на конвейере 29. Перед возвращением в исходное положение щека 3 своими упорами 5
5 достигает траверсы 17, которая получает перемещение вдоль направляющих 9, 10 и своими пальцами 19 и 21 воздействует на пазы 13 и 15, в результате чего направляющая 9 с шибером 11 поворачивается против часовой стрелки, а направляю0 щая 10 с шибером 12 поворачивается по часовой стрелке, т. е. шиберы 11 и 12 вновь возвращаются в исходное положение - положение сталкивания. В конце хода штока 2 линейка 24 воздействует на тормозной золотник 25, который переклю5 чает сжатый воздух в заднюю полость пневмоцилиндра 1, и цикл повторяется.
Формула изобретения
Сталкиватель штучных грузов, включающий направляющие, подвижно смонтированные на них связанные между собой каретки с щиберами, соединенный с каретками
силовой цилиндр и механизм поворота шиберов с соединениями спиральный паз - палец, отличающийся тем, что, с целью повышения надежности работы, шиберы снабжены противовесами, а механизм поворота выполнен в внде траверс, установленных
на концах направляющих с возможностью перемещения вдоль последних от взаимодействия с каретками, при этом пальцы закреплены на траверсах, а спиральные пазы выполнены на направляющих, смонтированных посредством подщипников.
,Е
ри&.2
//
П
12
сригЛ
cfjue.S
сри&.б
.7
| Сталкивающее перегрузочное устройство тележечных конвейеров | 1980 |
|
SU899444A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ШАГОВЫЙ ТРАНСПОРТЕР С ФЛАЖКАМИ | 0 |
|
SU276794A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Авторское свидетельство СССР № 755708, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
