иг.2
углом к подающему приводному роль- гаигу (Р) I и выполнен в виде основного и аналогичного последнему дополнительного цепных конвейеров 2 с ветвями 3 и 4 соответственно, состоящих из параллельных цепных контуров (К) 5-7 и 8-10, Средние К 6 и 9 смещены относительно крайних К 5,7 и 8,10 в направлении их перемещения. При этом дополнительный конвейер 2 расположен относительно Р I с проти- :воположной стороны, К 8-10 смещены относительно Р 1, а К 8-10 смещены относительно К 5-7 в поперечном направлении. На каждом К 5-10 установлено по одному кулачку с роликом, ось которого перпендикулярна К. Приводные звездочки основного и дополнителного конвейеров 2 установлены на валу, связанном с общим приводом. Система смонтирована на раме с регулируемыми упорами и датчиками крайних- положений и остановки кулачков. Для перемещения тары в поперечном направлении для подачи ее на позиции 44 . после включения привода кулачки К 5- 7 начинают движение в сторону позиции 44. При этом кулачки К 5 и 7 поднимают тару за переднюю лыжу, а кулачок К 6 - за заднюю и поднимают ее над Р 1. Продолжая движения, кулачки переносят тару на позицию 44 и опускают ее на раму.1 з.п.ф-лы, 8 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сушильная установка для мелких изделий | 1987 |
|
SU1513354A1 |
| Автомат для укладки рулонов на плоский поддон | 1979 |
|
SU781164A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Установка для шлифовки и полировки плит из естественного камня | 1973 |
|
SU441133A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Линия для производства керамической плитки | 1985 |
|
SU1284837A1 |
| Линия технологической обработки щитовых изделий | 1988 |
|
SU1549880A1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1150198A1 |
| Пакеторазборная машина для штучных грузов | 1974 |
|
SU667469A1 |
Изобретение относится к пром., транспорту и м.б. использовано в гру- зораспределительных системах автоматизированных складов и автоматизированных транспортно-складских системах для гибких производственных систем. Цель изобретения - повьш ние емкости накопления. Передающе-накопитель- ный механизм расположен под прямым
1
Изобретение относится к промышленному транспорту, в частности для перемещения и накопления штучных грузов, например тары с жестким основанием, в грузораспределительнь1х системах автоматизированных складов и автоматизированных транспортно- складских системах для гибких производственных систем.
Целью изобретения является повьппе ние емкости накопления.
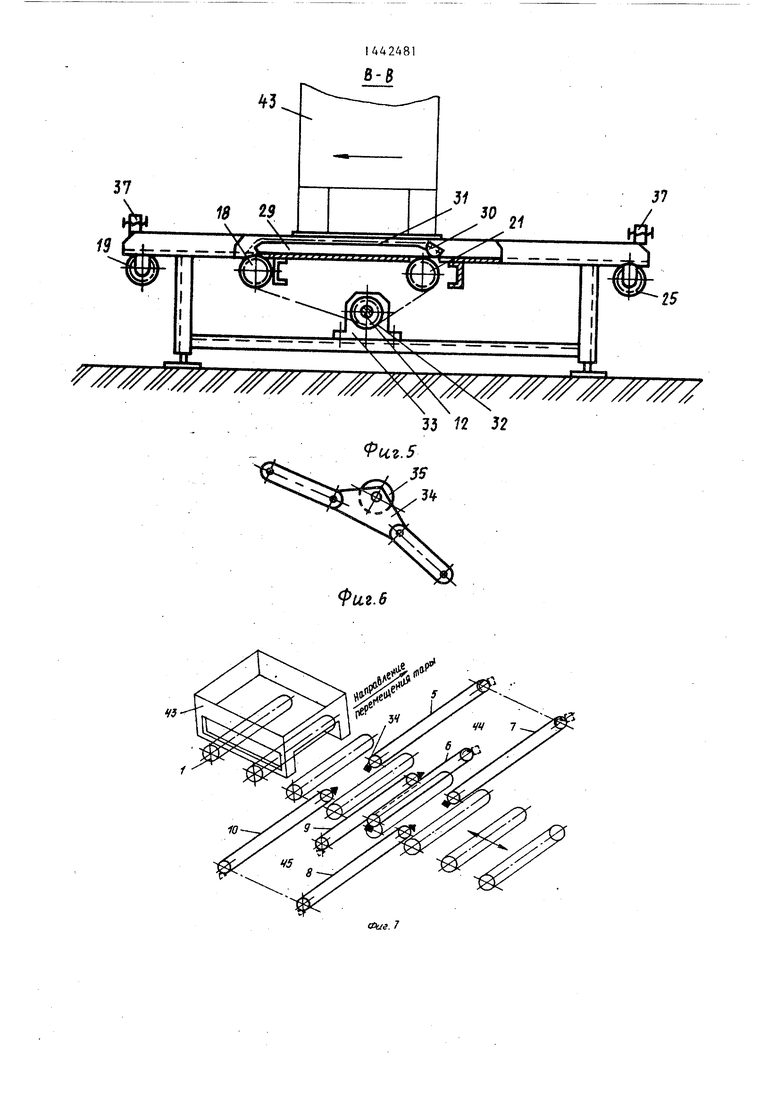
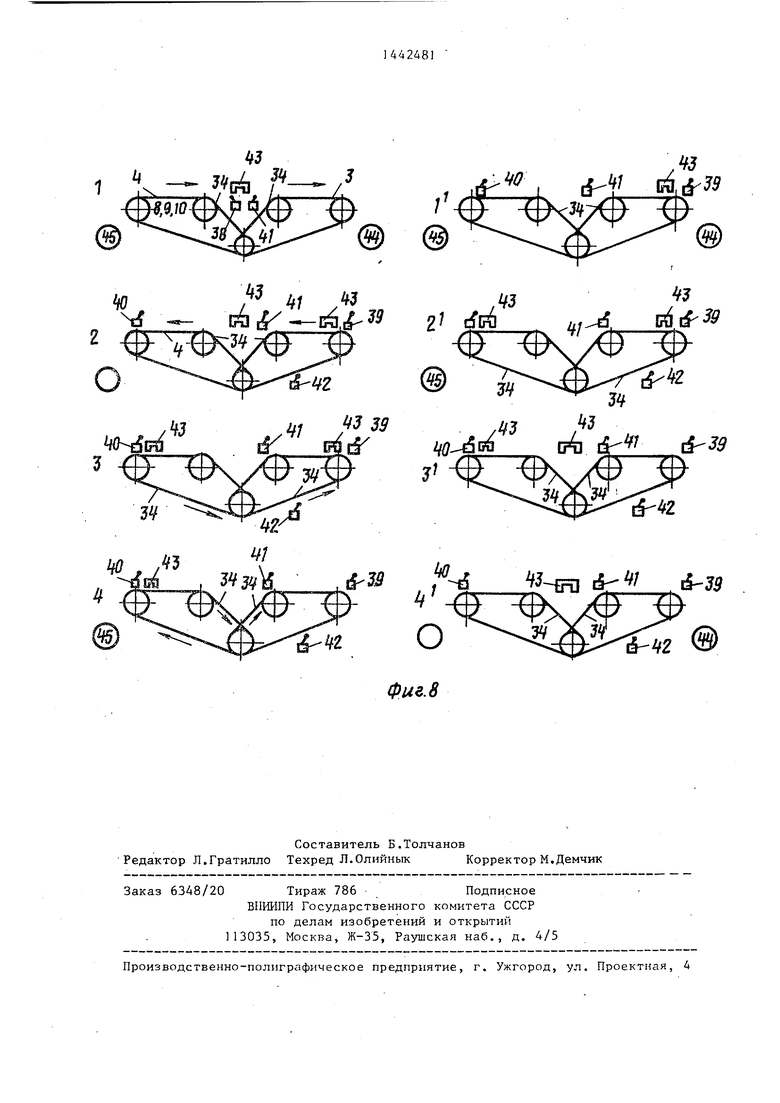
На фиг.1 дано устройство для перемещения и накопления грузов; на фиг,2 - то же, вид сверху; на фиг.З разрез А-А на фиг.1; на фиг.4 - разрез Б-Б на фиг.1; на фиг.5 - разрез В-В на фиг.; на фиг.6 - кулачок, установленный на цепи; на фиг.7 - структурная схема механизма; на фиг,8 -- схема работы механизма.
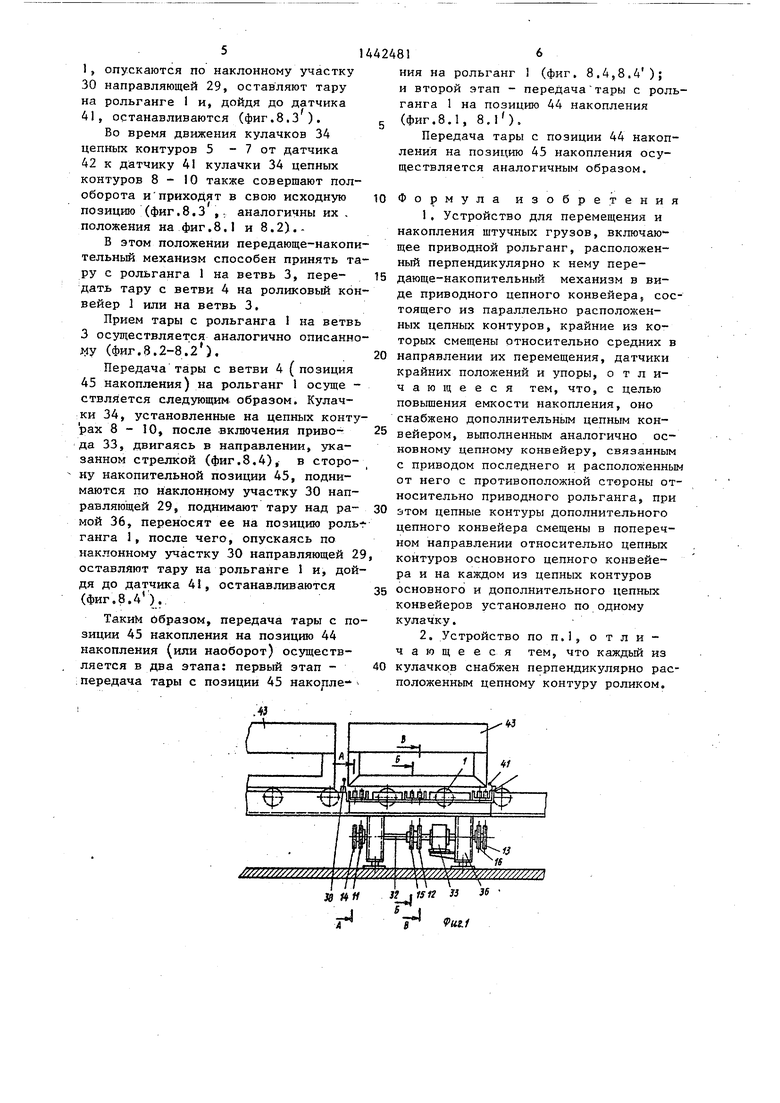
Устройство для перемещения и накопления штучных грузов содержит подающий приводной рольганг 1 (фиг.1 и 2), расположенный под прямым уг- лом к нему передающе-накопительный механизм в виде основного и дополнительного цепных конвейеров 2 с ветвями соответственно 3 и 4, состоящих из аналогичных цепных конту- ров 5 - 7 и 8 - 10, при этом цепные контуры 5 и 7, 8 и 10 являются крайними, а 6 и 9 средними. Средние цепные контуры 6 и 9 смеп(ены относительно крайних 5 и 7, 8 i; 10 в направлении их перемещения на величину (фиг.4). Дополнительный конвейер с :противоположной стороны относительно рольганга основного конвейера.и цепные контуры дополнительного цеп- ;Ного конвейера смещены в поперечном направлении относительно цепных контуров основного конвейера.
Контуры включают приводные звездочки 11 - 13 и 14. - 16 и неприводные звездочки 17 - 22 и 23 - 28. Каждый из цепных контуров 5-10 опирается на направляющую 29, имеющую наклонные 30 и прямолинейный 3 участки.
Приводные звездочки 11 - 13 и 14-16 установлены на валу 32, который связан с общим приводом 33,
На цепных контурах 5 - 7 и 8 - 10 установлены кулачки 34 с роликами 35, ось которых перпендикулярна цепному контуру.
Вся система смонтирована на раме 36, на которой установлены регулируемые упоры 37, датчики 38 - 40 крайних положений и датчики 41 и 42 остановки кулачков 34. -По механизму перемещается тара 43, Ветви 3 и 4 двухвет вевого цепного конвейера 2 обслуживают соответственно места 44 и 45 комплектовки (накопления).
Датчики 38 - 40 сообщают о наличии или отсутствии тары на приводном
31442481
рольганге на позициях 44 и 45 комплек- (фиг.8,2) тонки (накопления). Величина А равна расстоянию между поперечными осями 46 лыж тары 43. Расстояние между кулачками 34, установленными на контурах 5,7 и 6 или 8, 10 и 9, меньше поперечного размера тары 43, но
она может быть либо про щена по рольгангу I, либо при необ ходимости передана на накопление, вторую ветвь 4 передающе-накопител ного механизма 2. Для этого после, остановки тары 43 на рольганге .1 . привод 33 включается в обратную ст
больгае расстояния между внутренними по- рону.Купачки 34, установленные на
верхностями 47 лыж тары.
Устройство работает следующим образом.
В исходном положении кулачки 34 взаимодействуют с датчиком 41 и расположены ниже относительно несущей плоскости рольганга 1. Тара 43 находится на рольганге 1 и взаимодействует с датчиком 38. На позициях 44 и 45 комплектовки (накопления) тары нет.
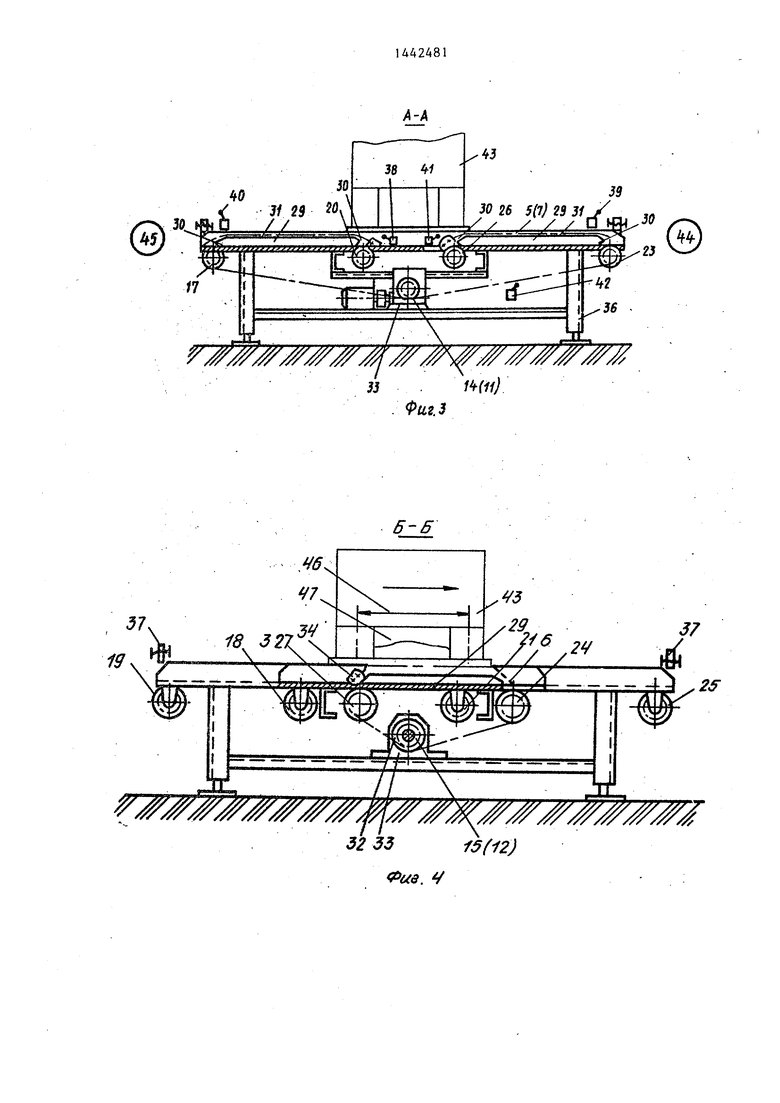
При необходимости перемещения тары 43 в поперечном направлении для - подачи ее, например, к комплектовщику, находящемуся в позиции 44, рольганг 1 останавливается от срабатьша- ния датчика 38 (исходная позиция, фиг.8.1), Включается привод 33 и кулачки 34, установленные на цепных : контурах 5-7, начинают движение в сторону позиции 44. При этом кулачки 34, установленные на цепных контурах 5 и 7, поднимаясь по наклонному участку 30 направляющей 29, поднимают тару 43 за переднюю лыжу (фиг.З), а кулачок 34, установленный на цепном контуре 6, - за заднюю, и поднимают ее над приводным рольгангом (фиг.4). Продолжая движение, кулачки 34 переносят тару 43 в позицию 44, а потом, опускаясь по второму наклонному участку 30 направляющей 29, опускают тару 43, ставят ее на раму 36 и, продолжая движение, останавливаются на датчике 41 (исходная позиция, фиг.8.1).
Кулачки 34, установленные на цепных контурах 8 - 10, начинают движение одновременно с кулачками 34 цеп- нь1х контуров 5 - 7 и, поскольку они расположены симметрично с кулачками 34 на цепных контурах 5-7, но на обратной ветви 4 устройства, двигаются (в утопленном положении) в обратном направлении по направлению к позиции 45 и останавливаются в .исходной позиции (фиг.8.1)
При подходе следующей тары 43 на подающий приводной рольганг 1
(фиг.8,2)
она может быть либо пропущена по рольгангу I, либо при необходимости передана на накопление, на вторую ветвь 4 передающе-накопител ь- ного механизма 2. Для этого после, остановки тары 43 на рольганге .1 . привод 33 включается в обратную сто0
5
0
5
0
цепных контурах 8 - 10, начинают движение в сторону позиции 45 и, поднимаясь по наклонному участку 30 направляющей 29, поднимают тару 43, стоящую на подающем приводном рольганге 1, и переносят ее в позицию 45, а потом, опускаясь по второму наклонному участку 30 направляющей 29, уходят из-под тары, оставляя тару 43 на раме 36, и продолжают движение до тех пор, пока кулачки 34, установленные на цепных контурах 5 - 7, совершив пол-оборота, не дойдут до датчика 42 (фиг.2).
Таким образом, происходит накопление двух тар. При этом по рольгангу 1 может проДолжа.ться движение тар напрямую. При необходимости вьщать одну из накопленных двух тар 43 соответствующие кулачки 34 начинают , движение в сторону соответствующей тары, например правой тары 43 (фиг.8.3), поднимаются по наклонному участку 30 направляющей 29, поднимают эту тару над рамой 36 и, соверg щив пол-оборота и переместив эту тару в зону действия подающего приводного рольганга 1, оставляют ее на нем и останавливаются в исходном положении на датчике 41. При этом ку0 лачки 34, сидящие на второй (противоположной) ветви дополнительного конвейера, двигаются в утопленном положении.
Рассмотрим описанную работу пере5 дающе-накопительного механизма на примере выдачи на рольганг I одной из двух накопленных тар, например 43, стоящей на раме 36 у позиции 44 накопления (комплектования).,
0 Из положения (фиг.8.2 ) после включения привода 33 начинается движение кулачков 34, установленных на цепных контурах 5 - 7, в сторону позиции 44 накопления (фиг.8.3).В
5 процессе движения направляющей 29 поднимают тару 43, стоящую на раме 36 у позиции 44,и,совершив пол-оборота, перемещают эту тару в зону подающего приводного рольганга
1, опускаются по наклонному участку 30 направляющей 29, оставляют тару на рольганге 1 и, дойдя до датчика 41, останавливаются (фиг.8.3 ).
Во время движения кулачков 34 цепных контуров 5 - 7 от датчика 42 к датчику 41 кулачки 34 цепных контуров 8-10 также совершают полоборота и приходят в свою исходную позицию (фиг.8.3 ,, аналогичны их , положения на фиг.8.1 и 8.2)..
В этом положении передающе-накопи- тельный механизм способен принять тару с рольганга 1 на ветвь 3, пере- дать тару с ветви 4 на роликовый конвейер J или на ветвь 3,
Прием тары с рольганга 1 на ветвь 3 осуществляется аналогично описанно- W (фиг.8.2-8.2).
Передача тары с ветви 4 ( позиция 45 накопления) на рольганг 1 осуще - ствляется следующим образом. Кулачки 34, установленные на цепных контурах 8-10, после включения приво- да 33, двигаясь в направлении, указанном стрелкой (фиг.8.4), в сторону накопительной позиции 45, поднимаются по наклонному участку 30 направляющей 29, поднимают тару над ра- мой 36, переносят ее на позицию роль Ганга 1, после чего, опускаясь по наклонному участку 30 направляющей 29 оставляют тару на рольганге 1 и, дойдя до датчика 41, останавливаются (фиг.8.4).
Таким образом, передача тары с позиции 45 накопления на позицию 44 накопления (или наоборот) осуществляется в два этапа: первый этап - ; передача тары с позиции 45 накопле-
да «
н
ния на рольганг 1 (фиг. 8.4,8.4); и второй этап - передача тары с рольганга 1 на позицию 44 накопления (фиг.8.1, 8,1).
Передача тары с позиции 44 накопления на позицию 45 накопления осуществляется аналогичным образом.
Формула изобретения
зг, isfi 33 36
V
иг.1
.
. i(ii):
33
/(fl,
S233fSfi2)
.
. .3
6-Б
иг.б
/f3 d-V g5.
2 cfo
3
. d- d-
J
.«
| Устройство для перемещения штучных грузов в двух взаимно перпендикулярных направлениях | 1971 |
|
SU470159A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| НАСОС МНОГОСТУПЕНЧАТЫЙ | 2008 |
|
RU2387879C2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
