4 4: Jlik
СО 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки грузоподъемного механизма на транспортное средство | 1986 |
|
SU1493505A1 |
| Устройство для установки грузоподъемного механизма на транспортное средство | 1986 |
|
SU1444191A1 |
| Машина для вскрытия кюветов от снега | 1988 |
|
SU1602955A1 |
| Гидропривод мобильной машины | 1988 |
|
SU1643810A1 |
| Самосвальное транспортное средство для перевозки бетонной смеси | 1986 |
|
SU1395533A1 |
| Бульдозер | 1988 |
|
SU1553631A1 |
| Рабочий орган планировщика | 1986 |
|
SU1384671A1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| Автогрейдер | 1986 |
|
SU1490315A1 |
| Система управления противовесом погрузчика | 1986 |
|
SU1409585A1 |
Изобретение относится к спецна-, лизированному транспорту для транспорч тировки и погрузки грузов, имеющему стреловой грузоподъемный механизм. Цель изобретения - повышение надежности, сокращение времени на крепление груза и облегчение условий труда. В известнымх устройствах усилие прижатия груза штангами не контролируется и получается различным,.а само прижатие осуществляется с помощью винтов с большой затратой сил и времени. Транспортное средство содержит качающиеся штанги, осуществляющие прижим груза к раме. Штанги выполнены в виде гидроцилиндров, штоковые полости которых соединены через вентили с гидроаккумуляторами. Гидроаккумулятор соединен одной гидролинией с показывающим манометрическим прибором, а другой гидролинией - с напорной гидромагистралью через обратный клапан и гидроклапан. 1 э.п. ф-лы, 1 ил. S S (Л
1Ч
114
Изобретение относится к специали- зироианному транспорту .опя транспортировки и погрузки грузов, имеющему стреловой грузоподъемный механизм.
Цель изобретения - повышение на- дажности, сокращение времени на крепление груза и облегчение условий труда.
На чертеже изображено транспортное средство со стреловым грузоподъемным механизмом.
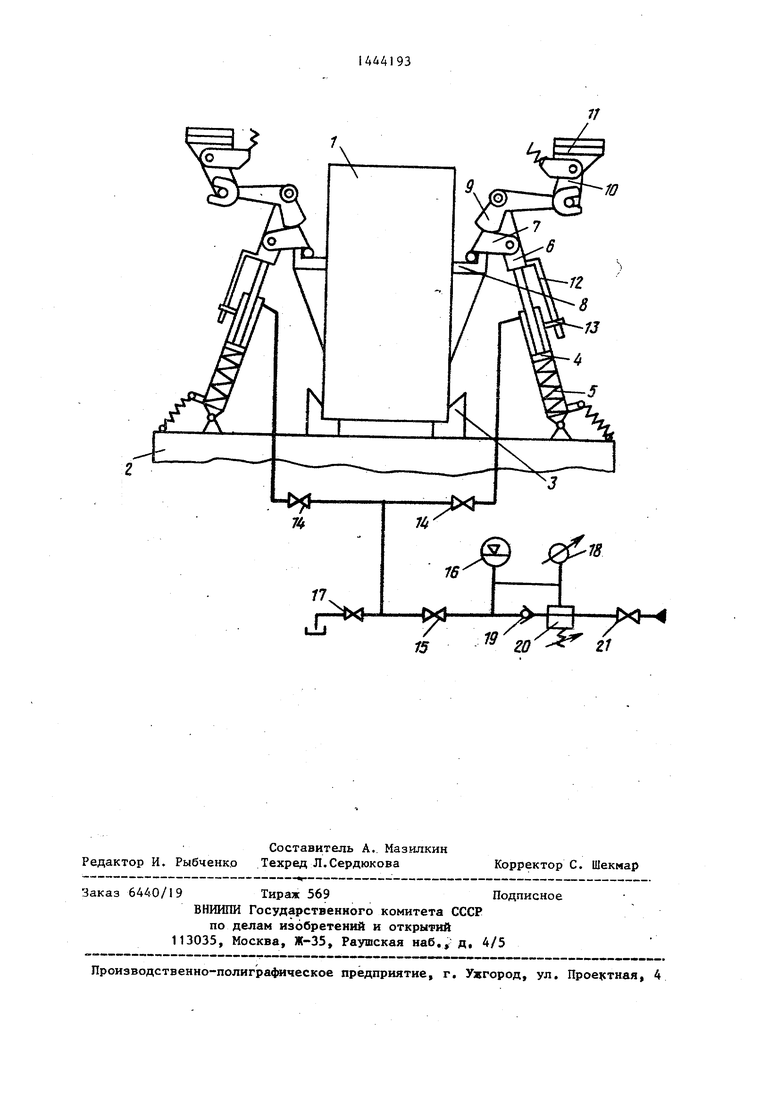
Груз 1 установлен на раме 2 трац- спортного средства с помощью опор 3. Устройство для крепления груза содержит качаго циеся штанги, выполненные в виде гидроцилиндров 4, бесштоковые полости которых снабжены пружинами 5. Корпусы гидроцнпиндров 4 шарнирно прикраплены к раме, а штоки неподвиж- но соедипены с корпусами замков 6, Запорные крюки 7 замков 6 взаимодействуют с кронштейнами
груза, а
двухплечне рычаги 9 имеют циливдри- ческие кулачки на одном Конце, взаи- модт ействующие с крюками 7, и вилку на другом конце, взаимодействующую ,с нажнмшлми кронштейнами 10, закрепленными на стреле 11, Штоки гидроци- линдров 4 могут совершать только возвратно-поступательные двийсения, а вращательное движение предотвращается стержнями 12 и направляющими скобами 13. Штоковые полости гидроцилиндров 4 соединены гидролиниями через вентили 14 и 15 с гидроаккумулятором 16, который соединен одной гид- ролииией через вентиль 17 с гидробаком., другой гидролипией - с манометром 18 и третьей гидролинией через обратный клапан 19, редукционный кла- 11 ан 20 и ве ггиль 21 - с напорной гид- ромагистралыо. Манометр имеет две шкалы, одна из которых проградуирова
45
50
на в единицах давления, а другая - в единицах С1шы.
Транспортное средство.работает следующим образом.
В рабочем -состоянии все механи- ч 5ские элементы транспортного средства занимают позиции, изображенные на чертеже. Вентили 14, 15 и 21 открыты, а вентиль 17 закрыт. Гидроаккумулятор 16 заряжен, и величина давления его зарядки соответствует ус- тановленноь у усилию прилсима груза 1 щ-тангами. Давление зарядки гидроак- --.улятора 16 регулируется с помощью еЯнтилей 15 и 17, обратного клапана
932
19 и клапана 20, а контролируется с помощью манометра 18, Поскольку што- ковые полости гидроцилиндров 4 соединены с гидроаккумулятором 16, то штоки через замки 6 осуществляют равномерное прижатие груза 1 к раме 2 транспортного средства с заданной величиной усилия. Величина усилия прижатия контролируется по соответствующей щкале манометра 18. При транспортировании груза происходит деформация рамы 2 в плоскости механизмов крепления и соответствующие перемещения штоков относительно корпусов гид роцилиндров 4.. Б зависимости от направления деформации каждой штанги штоковая .полость гидроцилиндра или заполняется рабочей жидкостью из гидроаккумулятора 1 6 , или рабочая жидкость вытесняется из щтоковой полости в гидроаккумулятор 16, однако усилие прижатия груза 1 к раме 2 остается неизменным и не превышает допустимой величины.
Для освобождения груза вентиль 15 закрывается, а вентиль 17 открьшает- ся, сообщая штоковые полости гидроцилиндров 4 с гидробаком. Штоки гидроцилиндров 4 выдвигаются, а сами штанги отводятся в стороны, освобождая груз.
При закреплении, груза указанные вьщ1е операции производятся в обратной
последовательности.
I
Формула изобретени я
на крепление груза и облегчения условий труда, цилиндром и подпружиненным штоком штанги образован гидроцилиндр, в бесштоковой полости -которого размещена пружина, а штоковая полость сообщена соответствующими вентилями со сливом и с гидроаккумулятором, последний из которых сообщен с напорной .магистралью последовательно включен-: ными обратным клапаном и редукционным клапаном, управляющая камера кот торого сообщена с гидроаккумулятором,
zi
| Транспортное средство со стреловым грузоподъемным механизмом | 1977 |
|
SU677959A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Транспортное средство со стреловым грузоподъемным механизмом | 1978 |
|
SU787214A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
