Изобретение относится к обработке металлов давлением и может быть использовано для подачи в рабочую зону пресса листовых заготовок и удаления из рабочей зоны пресса деталей.
Целью изобретения является расширение технологических возможностей работы.
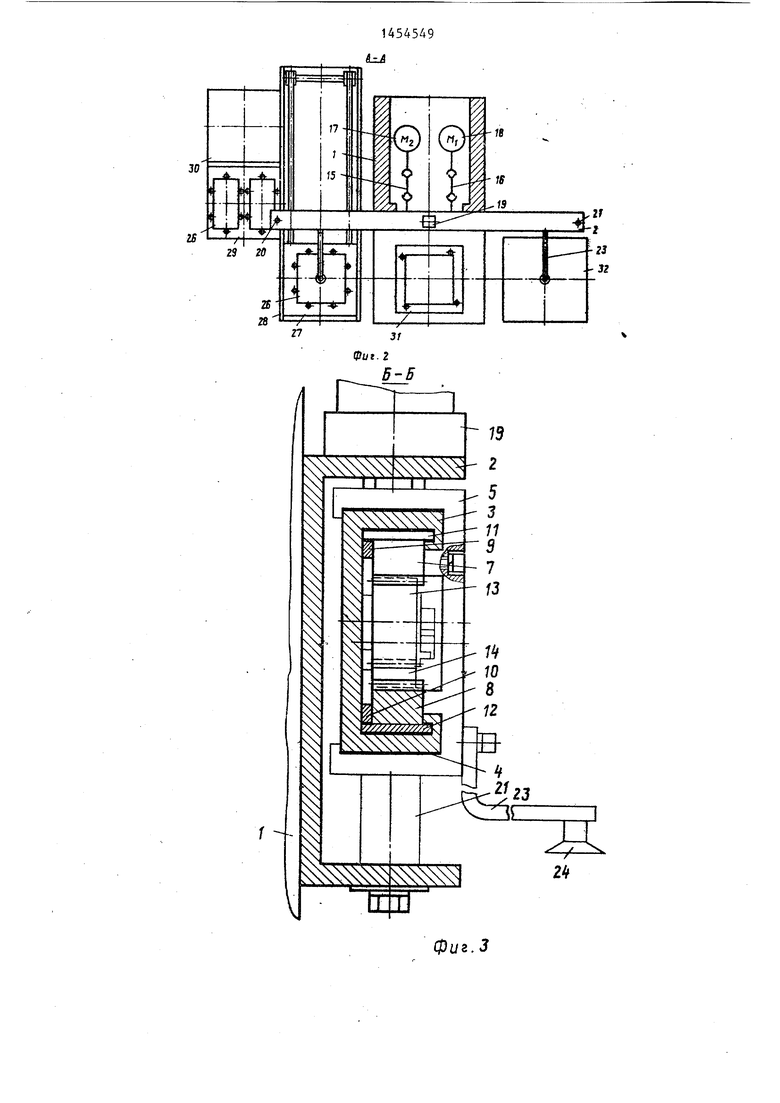
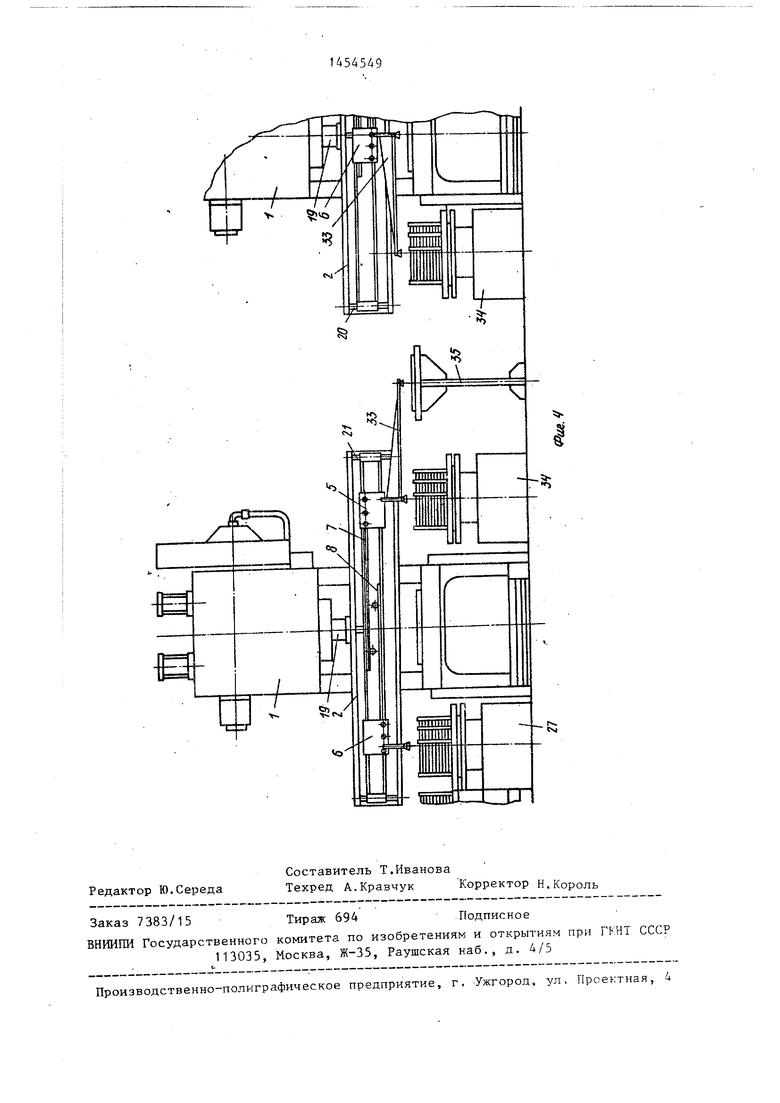
На фиг,1 схематично изображен предлагаемый промьшленньШ роботу на фиг.2 - сечение А-А на фиг.1},на фиг.З - сечение Б-Б на фиг.1; на фиг.4 - использование роботов для многооперационной штамповки,
Робот установлен на станине пресса 1 и содержит основание 2, траверсу 3, на которую с наружной и внутренней стороны наклеены капроновые прокладки 4. На траверсе 3 расположены две каретки 5 и 6, связанные с зубчатыми рейками 7 и 8, направлением для последних служат планки 9 и 10. Рейки 7 и 8 жестко установлены ни сталъньпс про- кладках 11 и 12 и через шестерни 13 и 14, карданные валы 15 и 16 связаны с электродвигателями 17 и 18.
Вертикальное перемещение травер- сы 3 осуществляется от пневмоцилинд- ра 19 по направляющим 20 и 21. На каретках расположены штанги 22 и 23 со схватами 24 и 25. Заготовки 26 укладываются в подающее устройство 27, которое содержит кассету 28 со стопо заготовок 26 на рабочей позиции у пресса 1 и дополнительную кассету 29 с стопами заготовок,а также свободную позицию 30 для пустой кассеты. Из подающего устройства 27 заготовки 26 укладываются в штамп прес са 31,, а готовые изделия в тару 32, Для многооперационной штамповки устанавливается штанга 33, магазинные устройства 34 и промежуточный стол 35
Промьшшенный робот работает следующим образом.
В исходном положении каретка 5 находится в крайнем правом положении, а каретка 6 - в крайнем левом положении, при этом захватные орга- ны 24 и 25 находятся соответственно: 24 над тарой 32,, а 25 над подающим устройством 27.
При нажатии кнопки Пуск траверса 3 с расположенными на ней карет- ками 5 и 6 под действием пневмоци- линдра 19 опускается вниз по скалкам 20 и 21. Включается схват 25 и
0
5
0 5
s
35
0
30
захватывает заготовку, расположенную в кассете 28 подающего устройства 27, после чего траверса 3 возвращается в первоначальное положение, Затем включается электродвигатель Ml и каретка 6 перемещается в штамп пресса 1, траверса 3 опускается вниз, схват освобождает заготовку, и траверса возвращается в верхнее положение. Двигатель Ml включается и как только каретка 6 выйдет на зоны действия штампа, пресс совершает рабочий ход. Одновременно с двигателем Ml включается двигатель М2, каретка 5 медленно начинает перемещаться влево и постепенно, набирая скорость после завершения хода пресса, останавливается над штампом 31. В то время каретка 6 останавливается над подающим устройством 27. Срабатывает пневмоцилиндр 19 и направляющая 3 опускается вниз, при этом захватный орган 24 захватывает заготовку в штампе пресса 1, а 25 - в подающем устройстве, траверса 3 поднимается в крайнее верхнее положение и происходит одновременное включение двух электродвигателей Ml и И2, в результате ч его каретка 6 останавливается над штампом пресса, а карет- ка 5 - над тарой 32. После опускания на траверсу 3 происходит освобождение заготовок, траверса 3 поднимается вверх и каретка 6 возвращается в исходную позицию. Затем цикл повторяется.
Формула изобретения
Промьшшенньй робот, содержащий основания, траверсу, на которой смонтирован механизм для захвата и переноса заготовок со средствами его вертикального и горизонтального перемещения и приводами, о т л и ч а- ю щ и и с Я тем, что, с целью расширения технологических возможностей, механизм захвата и переноса заготовок выполнен в виде двух независимых одна от другой кареток, при этом средство для горизонтального перемещения каждой из кареток выполнено з виде зубчато-реечной передачи, связанной с приводом, а средство для вертикального перемещения выполнено в виде на- правляющи:к, по которым двигается вверх-вниз траверса с помощью привода.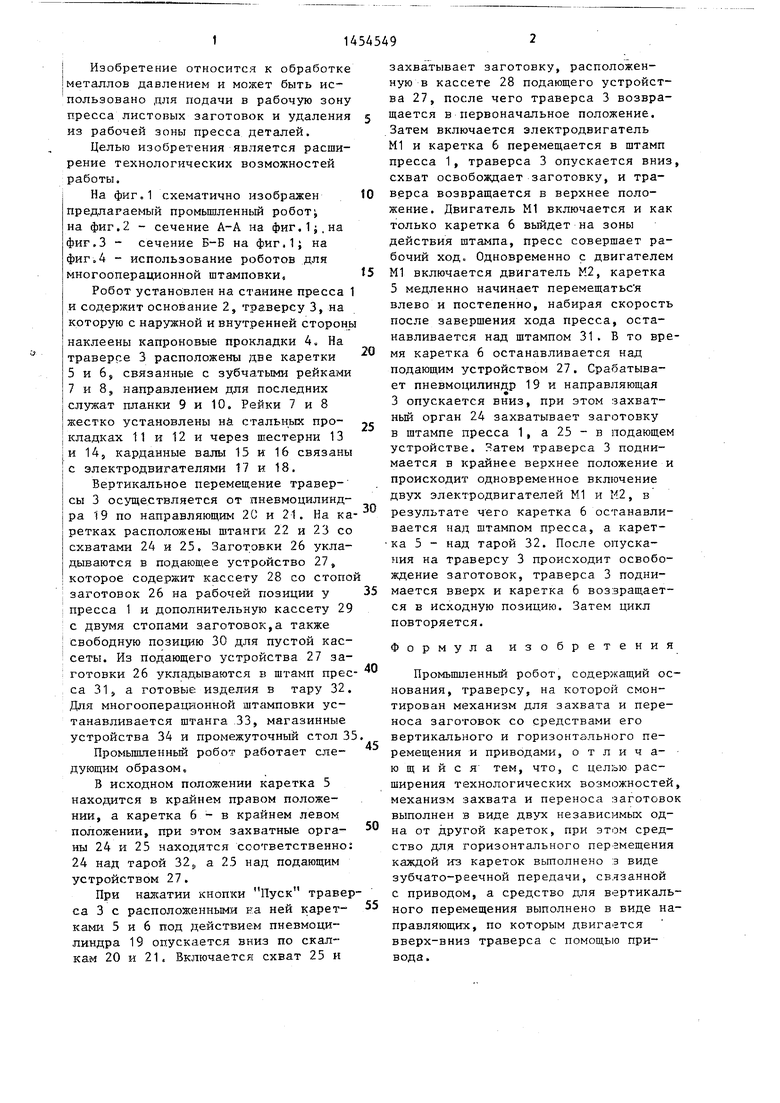
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Устройство для перемещения заготовок | 1986 |
|
SU1400732A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Гибкий производственный модуль холодной листовой штамповки | 1986 |
|
SU1535665A1 |
| Автоматическая линия | 1982 |
|
SU1043036A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
Изобретение относится к обработке металлов давлением и м.б. использовано для подачи в рабочую зону пресса листовых заготовок и удаления из рабочей зоны пресса деталей. Цель - расширение технологических возможностей. Робот установлен на станине Упресса 1 и содержит основание 2, траверсу 3, на которую с наружной и внутренней стороны наклеены капроновые прокладки. На траверсе 3 расположены две каретки 5 и 6, связанные с зубчатыми рейками 7 и 8. Направлением для последних служат планки. Рейки 7 и 8 жестко установлены на стальных прокладках и через шестерни, карданные валы связаны с электродвигателями. Вертикальное перемещение траверсы 3 осуществляется от пневмоци- линдра 19 по направляющим 20 и 21. На каретках 5 и 6 расположены штанги 22 и 23 со схватами 24 и 25. Устройство позволяет переносить заготовки с одной, двух или трех позиций в магазинном устройстве и укладывать их в штамп пресса без дополнительной переналадки робота и магазинного устройства и отказаться от промежуточной позиции. 4 ил. е (Л ел 4; СП 4 СО Фие.
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
