Изобретение относится к системам, обслуживающим автоматические линии, в частности к поперечным конвейерам, автоматизированных участок с парал- лельно-поперечной схемой агрегатирования однотипных линий.
Целью изобретения является повышение надежности работы автоматизированного участка.
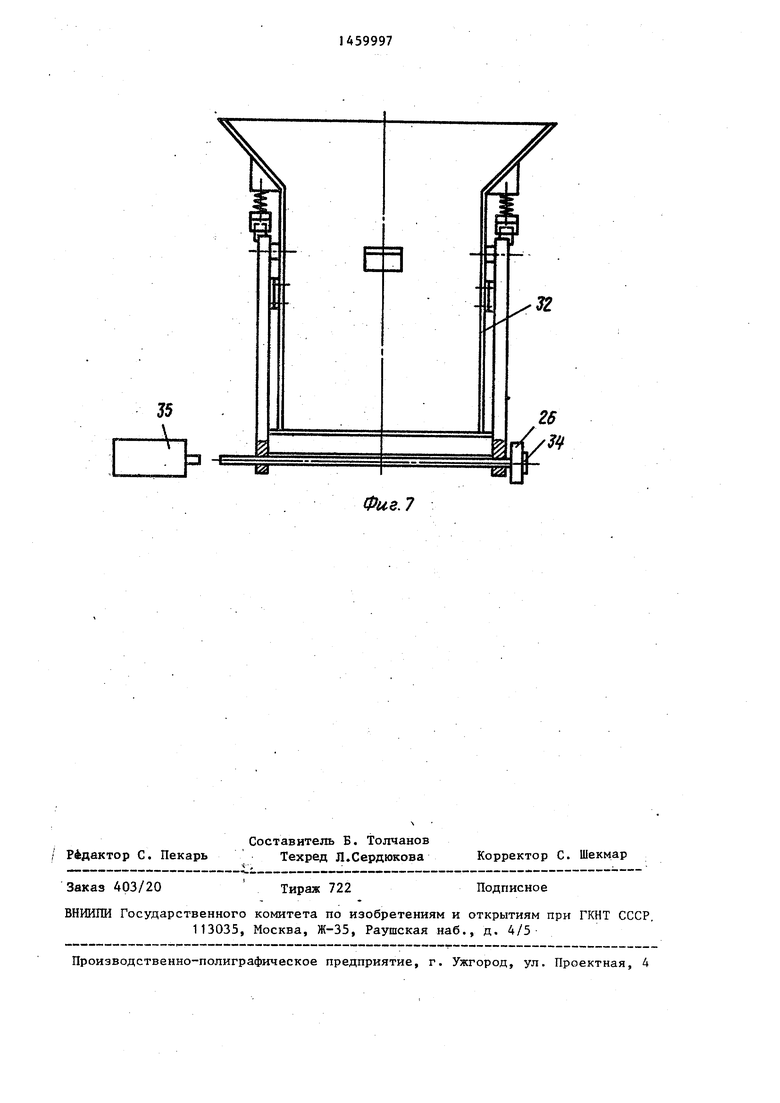
На фиг. 1 изображен элемент автоматизированного участкаi на фиг. 2 - часть транспортной системы автоматизированного участка, на фиг. 3 - тележка, вид спередиj на фиг. 4 - фиксатор рычага (узел I на фиг. 3), на фиг. 5 - упругий тормозной элемент (сечение А-А на фиг. 3)j на фиг. 6 - бункер-накопитель, вид спереди, на фиг. 7 - то же, вид сбоку.
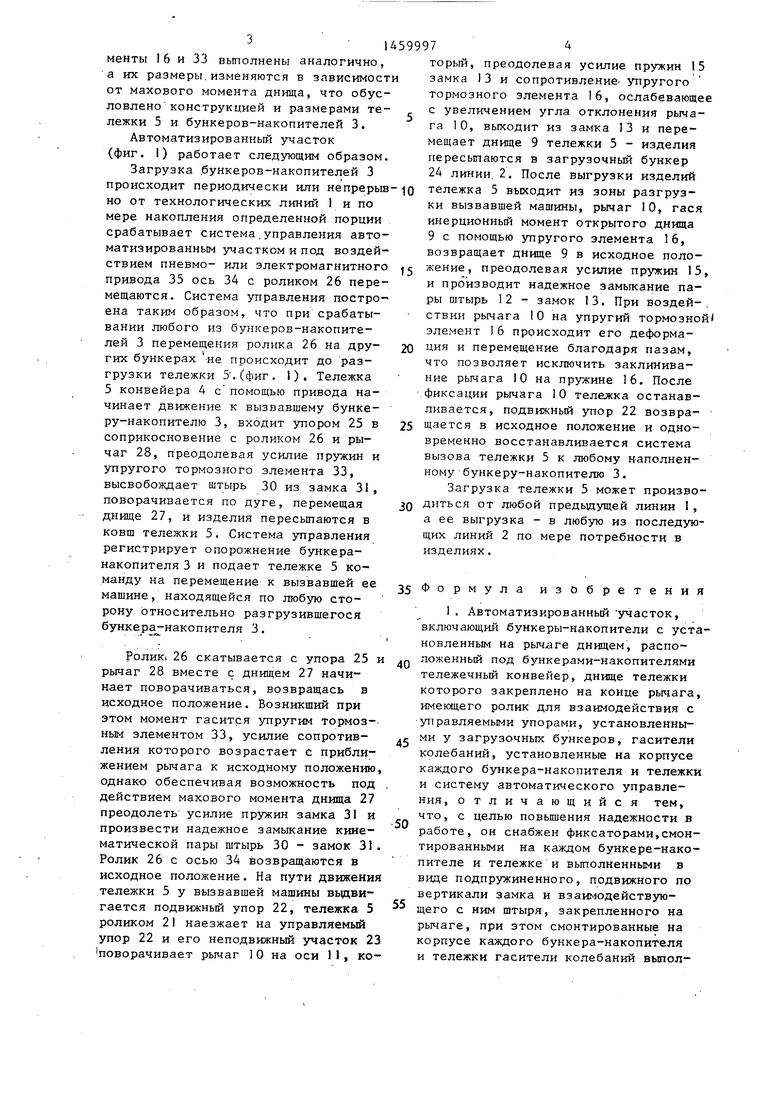
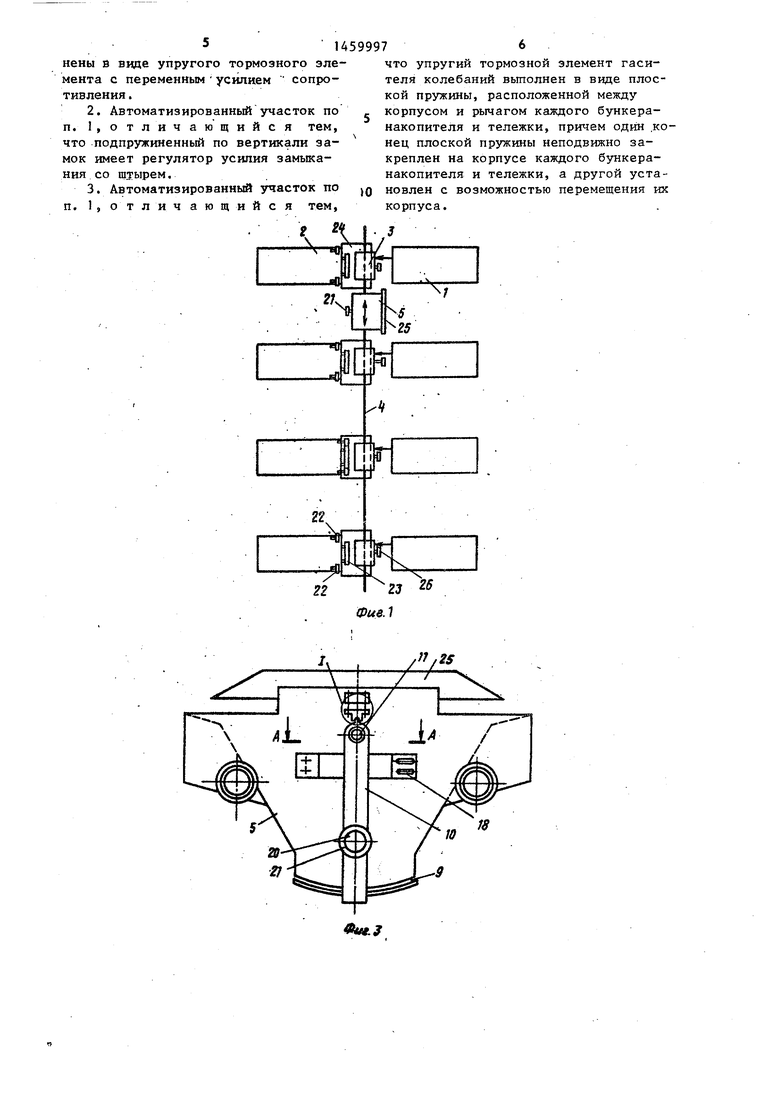
Автоматизированньй участок (фиг. 1) включает несколько одинаковых линий, расположенных параллельно другу другу, каждая из которых содержит станки 1,2 (роторные или роторно-конвейерные линии), распооженные по ходу технологического процесса, между которыми находятся бункеры-накопители 3, связанные с последующими линиями расположенным под ними тележечным конвейером 4. Тележка 5 конвейера 4 (фиг. 2) перемещается под бункерами-накопителями 3 по направляющим 6 с помощью катков 7, закрепленных в корпусе 8, тележки, выполненной с дугообразным днищем 9 (фиг. 3), которое закреплено на одном конце рьмага 10 узла управления смещениями днища. Фиксаторы выполнены в виде смонтированного на одном конце рычага 10, шарнирно установленного на корпусе с помощью оси 11 штыря 12 и взаимодействующего с ним замка 13, имеющим возможность перемещения по вертикали с помощью винтовых направляющих 14, закрепленных в выступе тележки 5. -Для регулирования усилия замыкания на направляющих 14 установлены пружины 15. ежду рычагом 10 и корпусом 8 тележки 5 установлен гаситель колебаний в виде упругого тормозного элемента 16 из плоской пружины с переменным усилием сопротивления, один конец
0
5
0
5
0
5
0
5
0
пазах, и перемещается вдоль тележки 5,.деформируясь под действием рычага 10. Максимальное значение усилия сопротивления достигается в момент замыкания рычага 10. На раскрьшаю- щем рычаге 10 на оси 20 установлен ролик 21 который взаимодействует с подвижными управляемыми упорами 22 и с их неподвижным участком 23, размещенным возле каждой линии на пути движения тележки. Вьщвижение подвижного упора 22 до смыкания его с неподвижным участком 23 осуществляется с помощью пневмо- или электромагнитного привода (не показан) по команде системы управления автоматизированным участком при отсутствии полуфабриката в загрузочном бункере 24 последующих в технологической цепочке линий 2. Наверху тележки установлен упор 25 (фиг. 3) для взаимодействия с роликом 26 (фиг. 7) бункеров-накопителей 3. Каждый бункер-накопитель 3 (фиг. 6) также имеет дугообразное днище 27 механизм управления им в виде рычага 28, установленного шарнирно по линии оси симметрии бункера- накопителя 3 на оси 29, один конец которого закреплен на днище 27, а на другом конце (аналогично тележке 5) закреплен штырь 30, взаимодействующий с замком 31, установленным с возможностью перемещения по вертикали, т.е. вертикальной оси бункера-накопителя, с помощью .винтовых направляющих, закрепленных в выступе бункера- накопителя 3 и снабженных пружинами. Замок 31 и штырь 30 являются фиксаторами рычага с днищем.
Между корпусом 32 бункера-накопителя и раскрьшающим рычагом 28 установлен гаситель колебаний в виде упругого тормозного элемента 33 с переменным усилием сопротивления (аналогично тележке 5), достигающим максимального значения в момент фиксации рычага. Ролик 26 установлен на оси 34, перемещаемой в направляющих бункеров-накопителей 3 с помощью пневмо- или электромагнитного привода 35 по команде системы управления автоматизированным участком при заполнении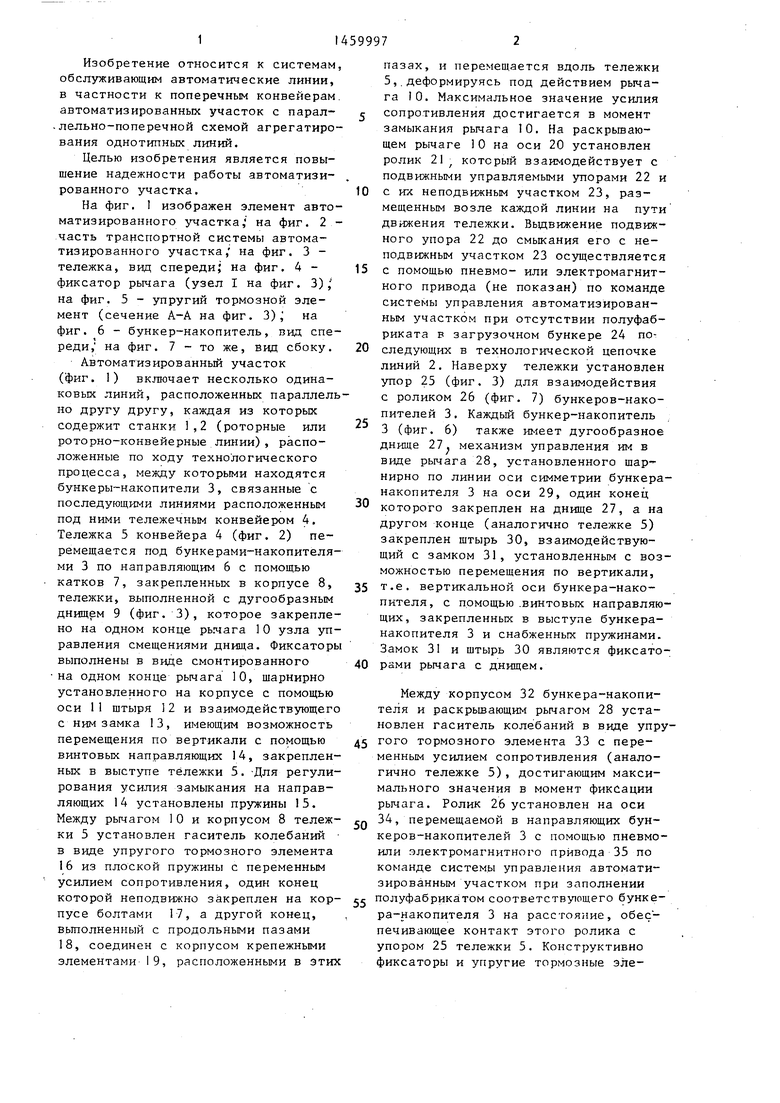
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1979 |
|
SU806557A1 |
| Вертикально замкнутый тележечный конвейер-накопитель | 1988 |
|
SU1609728A1 |
| Тележечный конвейер | 1975 |
|
SU602424A1 |
| Тележечный конвейер | 1981 |
|
SU1008102A1 |
| ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1972 |
|
SU328038A1 |
| Поточная линия для сборки и сварки изделий | 1978 |
|
SU747673A1 |
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |
| Автоматизированный участок | 1980 |
|
SU910496A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |
| ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1971 |
|
SU317588A1 |
Изобретение относится к системам, обслуживающим автоматические линии, и позволяет повысить надежность в работе. Автоматизированный участок включает бункеры-накопители (БН) 3 с установленным на рычаге 28 днищем (Д) 27, расположенный под БН 3 тележечный конвейер и систему автоматического управления. На тележке -(Т) 5 тележечного конвейера через -рычаг 10 укреплено Д 9, имекщее ролик 21 для взаимодействия с управляемыми упорами 22, установленными у загрузочного бункера 24. На корпусе -П каждого БН 3 и Т 5 установлены гасители колебаний и фиксаторы. Фиксаторы Т 5 и БН 3 выполнены в виде подпружиненных по вертикали замков 13, 31 и закрепленных на рычагах 10, 28 и взаимодействующих с ними штырей 12, 30. Гасители колебаний Т 5 и БН 3 выполнены в вцце упругих тормозных элементов 16, 33 соответственно с переменным усилием сопротивления. К рычагу 28 прикреплен ролик 26. На Т 5 смонтирован в верхней части упор 25. Последний при перемещении Т 5 входит во взаимодействие с роликом 26, отклоняет рычаг 28 с Д 27, и изделия пересыпаются в Т 5. При уходе Т 5 рычаг-28 возвращается в исходное положение и его колебания гасятся элементом 33, после чего он фиксируется входом штыря 30 в замок 31. При разгрузке Т 5 вьщвигается упор, с которым взаимодействует ролик 21, отклоняющий рычйг 10 с Д 9, и изделия высьтаются в бункер 24. 2 з.п. ф-лы, 7 ил. J 30 S i (Л ел
которой неподвижно закреплен на кор- полуфабрика том соответствующего бункепусе болтами 17, а другой конец, ,ра-накопителя 3 на расстояние, обесвьтолненный с продольными пазамипечивающее контакт этого ролика с
18, соединен с корпусом крепежнымиупором 25 тележки 5. Конструктивно
элементами 19, расположенными в этихфиксаторы и упругие тормозные эле
менты 16 и 33 выполнены аналогично, а их размеры.изменяются в зависимос от махового момента днища, что обусловлено конструкцией и размерами тележки 5 и бункеров-накопителей 3.
Автоматизированный участок (фиг. 1) работает следующим образом
Загрузка бункеров-накопителей 3 происходит периодически или непрерьш но от технологических линий 1 и по мере накопления определенной порции срабатывает система.управления автоматизированным участком и под воздействием пневмо- или электромагнитного привода 35 ось 34 с роликом 26 перемещаются. Система управления построена таким образом, что при срабатывании любого из бункеров-накопителей 3 перемещения ролика 26 на других бункерах -не происходит до разгрузки тележки 5. (фиг . I) . Тележка 5 конвейера 4 с помощью привода начинает движение к вызвавшему бункеру-накопителю 3, входит зшором 25 в соприкосновение с роликом 26 и рычаг 28, преодолевая усилие пружин и упругого тормозного элемента 33, высвобождает штырь 30 из замка 31, поворачивается по дуге, перемещая днище 27, и изделия пересьтаются в ковш тележки 5. Система згправления регистрирует опорожнение бункера- накопителя 3 и подает тележке 5 команду на перемещение к вызвавшей ее машине, находящейся по любую сторону относительно разгрузившегося бункера-накопителя 3.
Ролик 26 скатывается с упора 25 и рычаг 28 вместе с днищем 27 начинает поворачиваться, возвращась в исходное положение. Возникший при этом момент гасится упругим тормоз-. ным элементом 33, усилие сопротивления которого возрастает с приближением рычага к исходному положению, однако обеспечивая возможность под действием махового момента днища 27 преодолеть усилие пружин замка 31 и произвести надежное замыкание кинематической пары штырь 30 - замок 31. Ролик 26 с осью ЗА возвращаются в исходное положение. На пути движения тележки 5 у вызвавшей машины вьщви- гается подвижный упор 22, тележка 5 роликом 21 наезжает на управляемый упор 22 и его неподвижный участок 23 поворачивает рычаг 10 на оси 1I, ко1459997
15
-|о
20
25
30
35
40
5
0
5
торый, преодолевая усилие пружин 15 замка 13 и сопротивление- упругого тормозного элемента 16, ослабевающее с увеличением угла отклонения рычага 10, выходит из замка 13 и перемещает днище 9 тележки 5 - изделия пересыпаются в загрузочный бункер 24 линии. 2. После выгрузки изделий тележка 5 выходит из зоны разгрузки вызвавшей машины, рычаг 10, гася инерционный момент открытого днища 9 с помощью упругого элемента 16, возвращает днище 9 в исходное положение, преодолевая усилие пружин 15, и производит надежное замыкание пары штырь 12 - замок 13. При воздей-. СТЕКИ рычага 10 на упругий тормозной элемент 16 происходит его деформация и перемещение благодаря пазам, что позволяет исключить заклинивание рычага 10 на пружине 16. После фиксации рычага 10 тележка останавливается, подвижный упор 22 возвра- щается в исходное положение и одновременно восстанавливается система вызова тележки 5 к любому наполненному бункеру-накопителю 3.
Загрузка тележки 5 может производиться от любой предьщущей линии I, а ее выгрузка - в любую из последующих линий 2 по мере потребности в изделиях.
Формула изобретения
.if
A-A
.S
28
21
Фиг. 6
J5
ЛРедактор С. Пекарь
Составитель Б. Толчанов Техред Л.Сердюкова
Заказ 403/20
Тираж 722
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР, 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг.7
Корректор С. Шекмар
Подписное
| Тележечный конвейер | 1975 |
|
SU602424A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Автоматизированный участок | 1980 |
|
SU910496A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
