Изобретение относится к машиностроению, в частности к средствам механизации и автоматизации, и может быть использовано в автоматических линиях, например для перемещения.заготовок на рабочую позицию.
Целью изобретения является упрощение конструкции и повышение надежности,
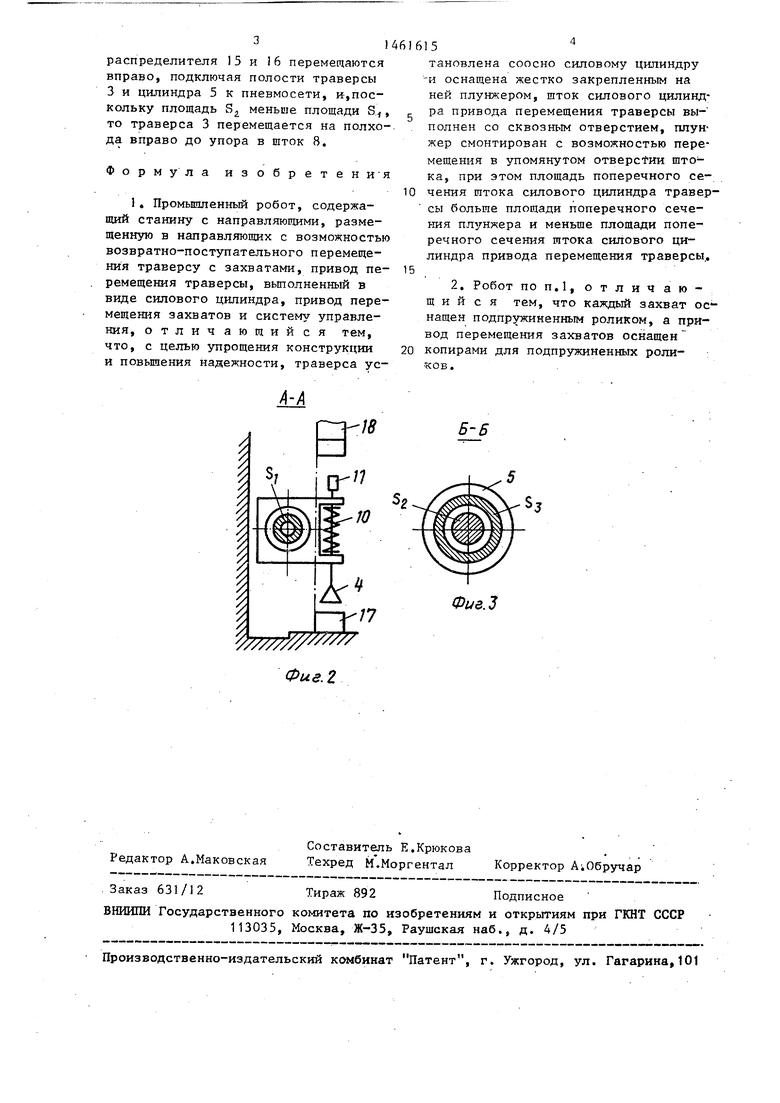
На фиг.1 изображен описываемый промышленньй робот, общий вид; на фиг. 2 - то же, разрез А-А на фиг.1| на фиг. 3 - разрез Б-Б на фиг,1«
Промьшшенный робот содержит смон- тированные на станине 1 направляющие 2, траверсу 3 с захватами 4, размещенную в направляющих 2 с возможностью возвратно-поступательного ПР- ремещения, привод перемещения траверсы 3, выполненный в видесилового цилиндра 5, привод 6 перемещения захватов и систему управления.
Траверса 3 установлена соосно силовому цилиндру 5, выполнена в виде силового цилиндра и оснащена жестко закрепленными, на ней плунжером 7. Шток 8 силового цилиндра 5 вьтолнен со сквозным отверстием, а плунжер 7 смонтирован с возможностью перемещения в упомянутом отверстии штока В Площадь 3 поперечного сечения штока 9 траверсы 3 больше площади Sg поперечного сечения плунжера 7 и меньше площади S поперечного сече- ния штока 8 привода .5
Каждый захват А оснащен подпружиненным пружиной 10 роликом 11, а привод 6 перемещения захватов 4 оснащен копирами 12 для роликов И. Ход тра- версы 3 ограничивается упором 13 слева и упором 14 справа, система управления содержит распределители 15 и 16. На станине 1 смонтированы штамп 17 И ползун 18.
Совместньй ход штока 8 и плунжера 7 равен половине хода траверсы 3, вторая половина хода осуществляется при вьщвижении плунжера 7 из.штока 8
Промышленньй робот работает еле- дующим образом
В исходном положении захваты 4 находятся в среднем положении, В это время полости траверсы 3 (корпуса цилиндра) и силового цилиндра 5 нахо- дятся под воздействием давления от пневмосети. Распределители 15 и 16 установлены в правом положении. Поскольку площадь S/ штока 9 траверсы ,3
меньше площади 83 штока 8 цилиндра 5, то шток 8 вьздвинут влево до упора на полную величину своего хода, составляющего половитгу хода траверсы 3. А так как площадь S-) штока 9 больше площади Sg плунжера 7, то траверса
3упирается упором.I4 в шток 8 цилиндра 5. В этом положении происходит штамповка заготовки при опускании под воздействием силы Р ползуна 118 и смыкания штампа. После штамповки ползун 18 поднимается в верхнее крайнее положение, давая сигнал на перемещение траверсы.3 влево, для чего распределитель 15 смещается влево. Полость траверсы 3 соединяется
с атмосферой и плунжер 7 по направляющим 2 перемещает траверсу 3 вместе с захватами 4 в крайнее левое положение до упора 13. Левьй захват 5 устанавливается над заготовкой, а правьй - над отштампованной заготовкой, находящейся в штАмпе. Поступает команда на поперечное перемещение захватов 4, т.е. вниз, до соприкосновения и прихвата заготовок, для чего привод 6 перемещения захватов
4перемещает копиры 12, которые,воздействуя на ролики 11, опускают зах ваты, после чего привод 6 возвраща - ет копиры 12 назад, и захваты 4 с заготовками под воздействием пружины 10 поднимаются. Поступает команда ha перемещение траверсы 3 вправо. Распределитель 16 отключается, сместив- .тисъ влево, а распределитель 15 включается в сеть, переместившись вправо. Воздух из пневмосети через верстие в штоке 9 поступает в полость траверсы 3.и перемещает ее до соприкосновения упора 14 в шток 8, а затем перемещает и его до тех пор,пока траверса 3 не упрется в цилиндр 5 в своем крайнем правом положении.После этого снова включается привод 6, опускающий захваты 4 описанным вьште способом. Отштампованная заготовка, освобождаясь от захвата 4, вьтадает в тару, а новая заготовка устанавливается в штамп. Привод 6, возвращая сь снова поднимает захваты 4. Включается в пневмосеть цилиндр 5 при сохранении давления в полости траверсы 3, которая перемещается на полхода влевос Цикл повторяется.
При необходимости вывода захратов 4 из левого в среднее положение,например при аварийной ситуации, оба
распределителя 15 и 16 перемесдаются вправо, подключая полости траверсы 3 и цилиндра 5 к пневмосети, и,поскольку площадь S меньше площади 3, то траверса 3 перемещается на полхо-. да вправо до упора в шток 8.
Формула изобретени я
1. Промышленный робот, содержа- пщй станину с направляющими, размещенную в направляющих с возможностью возвратно-поступательного перемещения траверсу с захватами, привод перемещения траверсы, выполненный в виде силового цилиндра, привод перемещения захватов и систему управления, отлич ающий ся тем, что, с целью упрощения конструкции и повышения надежности, траверса ус/)-/
1615
тановлена соосно силовому цилиндру -и оснащена жестко закрепленным на ней плунжером, шток силового цилинд- J- ра привода перемещения траверсы вы- полней со сквозным отверстием, плунжер смонтирован с возможностью перемещения в упомянутом oтвepctии штока, при этом площадь поперечного сечення штока силового цилиндра траверсы больше площади поперечного сечения плунжера и меньше площади поперечного сечения штока силового цилиндра привода перемещения траверсы,
2. Робот по п,1, о т л и ч а ю - щ и и с я тем, что каждый захват оснащен подпружиненным роликом, а привод перемещения захватов оснащен
копирами для подпружиненных роликов.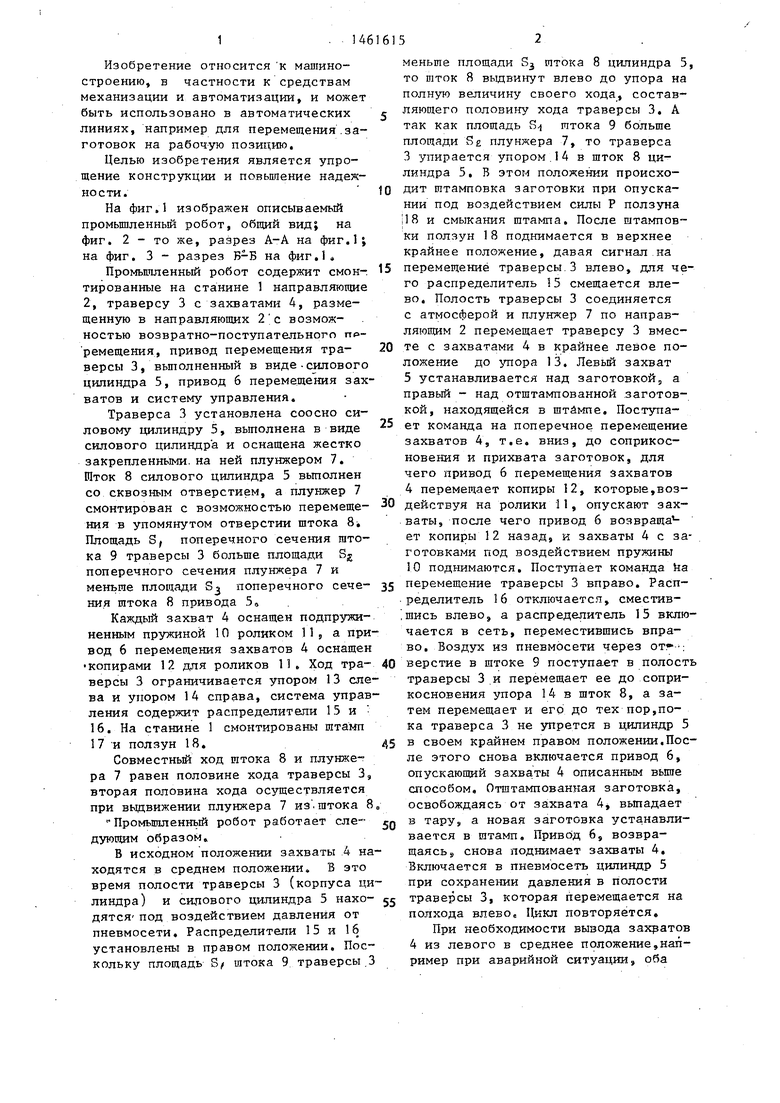
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи материала в зону обработки | 1987 |
|
SU1442299A1 |
| Робот к штамповочному прессу | 1985 |
|
SU1340868A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Автоматизированный комплекс для штамповки | 1987 |
|
SU1549649A1 |
| Многопозиционный пресс для штамповки деталей | 1988 |
|
SU1542670A1 |
| Устройство для загрузки и удаления деталей | 1982 |
|
SU1015995A1 |
| Ручное устройство для сборки | 1986 |
|
SU1324741A1 |
| Штамп для объемной штамповки | 1974 |
|
SU535130A1 |
Изобретение относится к мапшно- строению, в частности к средствам механизации и автоматизации, и может быть использовано в автоматических линиях, например для перемещения заготовок на рабочую позицию. Цель изобретения - упрощение конструкции и повьшение надежности. Траверса (т) 3 установлена в направляющих 2 соос- но силовому цилиндру (СЦ) 5 и оснащена жестко закрепленным на нейс плунжером 7. Плунжер 7 размещен с возможностью перемещения в сквозном отверстии штока 8 (СЦ) 5. Площадь поперечного сечения штока 9 Т 3 больше площади поперечного сечения плунжера 7 - и меньше площади поперечного сечения штока 8. При подаче давления в полости траверсы 3 и СЦ 5 щток 8 вьздвигается из СЦ 5 на полную величину своего хода, составляющую половину хода Т 3. В этом положении осуществляется рабочая операция. Полость Т 3 соединяется с атмосферой. Плунжер 7 перемещает Т 3 до упора 13. Привод 6 копирами 12 перемещает захваты к заготовкам. Давление подается в полость Т 3 через шток 9. Полость СЦ 5 соединяется с атмосферой. Т 3 перемещается до упора в СЦ 5. Заготовка, освобождаясь от захватов 4, попадает в тару, а новая заготовка попадает на рабочую позицию. Далее цикл повторяется. 1 з.п. ф-лы, 3 ил. ш (Л Од SD СП
Фиг.2
Фиа.З
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
