Изобретение относится к области автоматизации конвейерного транспорта, и может быть использовано для контроля проскальзывания и скорости лент транспортирующих машин непрерывного действия, предназначенных преимущественно для перемещения сыпучих материалов в различных областях производства.
Цель изобретения - повышение надежности контроля проскальзывания и скорости ленты конвейера.
На фиг. 1 показаны графики изменения во времени величины текущей скорости ленты и ее составляющих; на фиг. 2 - типичные спектральные плотности низкочастотной и высокочастотной составляющих колебаний скорости ленты и амплитудно-частотные характеристики механических систем электродвигатель - натяжной барабан и лента - натяжной барабан; на фиг. 3 - графики плотностей вероятности величин соответственно текущей скорости (а), низкоастотной составляющей скорости (б) и вы- окочастотной составляющей скорости (в); а фиг. 4 - идеализированный график выокочастотных колебаний скорости на коотком интервале времени и график изменения модуля колебаний высокочастотной со- 5 тавляющей скорости; на фиг. 5 - блок- схема устройства для реализации способа контроля проскальзывания и скорости лены конвейера.
Устройство содержит фильтры 1 и 2, блок Q 3 определения .модуля сигнала, блок 4 усреднения, блок 5 масштабирования, сумматоры 6 и 7, компараторы 8 и 9.
Способ осуществляется следующим образом.
В реальных условиях работы ленточных 15 конвейеров текущее значение скорости лены V(/) вследствие ее колебаний является случайной функцией времени. Параметры случайного процесса изменения текущего значения скорости ленты (например, спект- 2Q ральный состав) определяются двумя группами факторов, влияющих на скорость ленты, а именно изменениями напряжения At/, час- готы wc и коэффициента мощности Асохф сети питания приводного электродвигателя конвейера, а также изменениями момента 25 A/We сил сопротивления, приведенных к валу электродвигателя, ввиду изменения нагрузки на тяговом органе конвейера - ленте, т. е. факторами, которые оказывает влияние на скорость ленты вследствие изменения скорости вращения электродвигателя; изменениями фрикционных свойств контактной пары приводной барабан - контактирующий о ним участок ленгы, пульсациями нагрузки на тяговом органе ввиду обрыва грузо- несущих органов, заторов и т. д., упругими продольными и поперечными колебаниями самой ленты при ослаблении ее натяжения. Изменения этих факторов могут вызвать проскальзывание ленгы относительно приводного барабана и, следовательно, повлияют на величину текущей скорости ленты. 40
Факторы первой группы обуславливают медленные (низкочастотные) изменения скорости ленты, так как, во-первых, эти факторы сами меняются как правило медленно, во-вторых, даже если происходит скачкообразное их изменение, то вследствие инерционности механической системы электродвигатель - механическая передача (редуктор) - приводной барабан - лента - натяжной барабан скорость ленты будет из30
45
меняг-ься плавно, в соответствии с динами
ческими (частотными) свойствами системы по каналу А (У - А У, либо Ашс - А У, либо icoscp - ДУ, либо - А У
Таким образом, если из сигнала текущей скорости ленты каким-либо образом выделить составляющую с высокочастотным спектром колебаний и составляющую с низкочастотным спектром колебаний, то, сравнивая параметры этих двух составляющих с
5
Q
5 Q 5 0
0
5
0
5
соответствующими заданными их уровнями, возможно по результатам этих сравнений осуществлять контроль проскальзывания и скорости ленты, а именно по изменению параметров составляющей с высокочастотным спектром колебаний осуществлять контроль проскальзывания ленты и по изменению параметров составляющей с низкочастотным спектром колебаний осуществлять контроль скорости ленты.
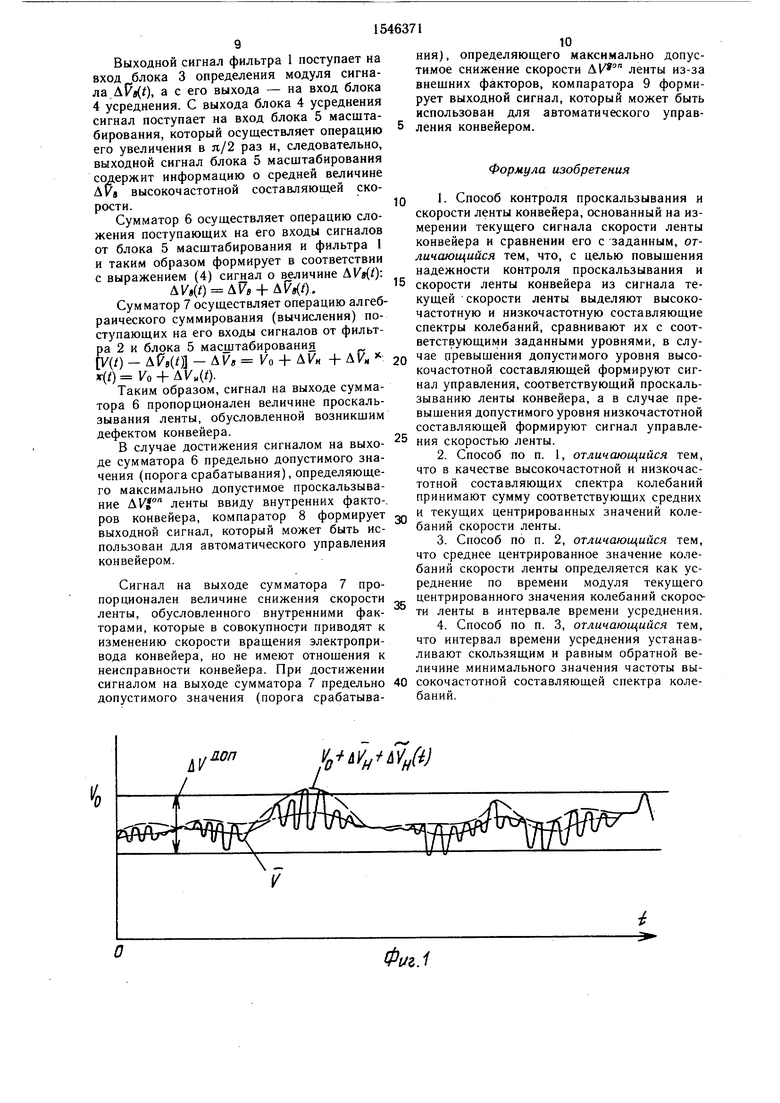
Поскольку на величину текущей скорости ленты V(t) одновременно оказывают влияние факторы обеих групп, то величина V(t) может быть представлена в виде трех составляющих
V(t) Уо + Л К, (0 + ДУ.(/),(1)
где УО - номинальное значергие V(t), т. е. величина текущей скорости ленты в идеальных условиях работы конвейера, когда отсутствуют все факторы, обуславливающие изменение скорости ленты;
ДУн(/)- низкочастотная составляющая колебаний скорости ленты; AVi(Ј) - высокочастотная составляющая колебаний скорости ленты. Из изложенного следует, что изменения как самой скорости V(t), так и ее составля ющих ДУ(/) и АУ(/) носят колебательный характер и поэтому каждая из этих трех величин может быть представлена детерминированной (средним значением составляю щей соответственно У, АУ« я AV0 и центри- рованной случайной составляющей соответственно V(t), АУ«(/) и АУй(/) с величинами спектральных плотностей 5(,(со), Sitrw(ti) и SAW (со), т.е.
V(t) (t); „(2)
дУ(/) АК« + ДКиф;(3)
ДУ8(0 АУа(0-1-ЛУвШ.(4)
Таким образом, как следует из (3) и (4), в качестве параметров составляющих с низкочастотным и высокочастотным спектрами колебаний можно принять суммы средних и текущих центрированных значений скорости ленты. В соответствии с (1), (3) и (4) можем записать
V(t) Уо + АУЯ(/) + АУ(0 Уо + А У + + ДУ«(0 + АУв + АУв(0.(5)
Изменения во времени текущей скорости ленты У(/) и ее составляющих показаны на фиг. 1.
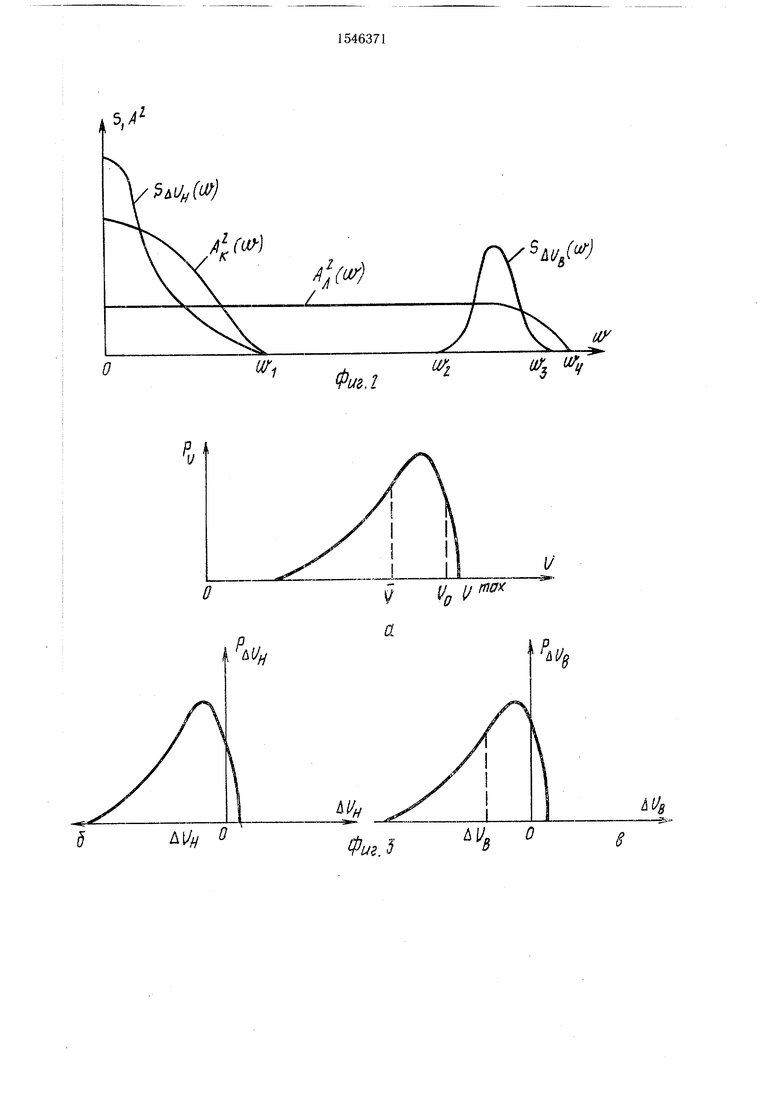
Рассматривая колебания текущей скорости V(t), обусловленные факторами первой группы, как низкочастотную составляющую колебаний скорости ДУц(), с учетом сказанного ее спектральный состав (спектральная плотность Sfltr co) будет определяться следующим выражением:
SAVH И Al ((o)Sf ,(ю),(6)
где Л«(со) - амплитудно-частотная характеристика механической системы электродвигатель-натяжной барабан, в которую входят электродвигатель, механическая передача (редуктор), приводной ба рабан, лента, натяжной барабан;
Sf, (со)- спектральная плотность изменения факторов первой группы.
Вид зависимостей (а) и /4 (со) показан на фиг. 2.
Очевидно, что диапазон частот, в котором 54сн(оз)0 не превосходит диапазон частот, где Л«(ш)0 и, следовательно, максимальную частоту (Oi спектра низкочастотных колебаний можно принять равной максимальной частоте полосы пропускания механической системы «электродвигатель - натяжной барабан.
Факторы второй группы обуславливают быстрые (высокочастотные) изменения скорости ленты в диапазоне частот ...(0з, так как, во-первых, сами эти факторы изменяются очень быстро и, во-вторых, инерционность механической системы, которая определяет верхнюю границу спектрального состава колебаний скорости, значительно мень- 20 ше, поскольку в механическую систему в этом случае входят только лента и натяжной барабан.
Рассматривая колебания текущей скоспектральными плотностями ее низкочастотной и высокочастотной составляющих S.H 5л„, (со) + S. ()(8)
Поскольку составляющие выражения (5) имеют разный спектральный состав, случайные низкочастотные и высокочастотные составляющие текущей скорости могут быть разделены частотной фильтрацией сигнала текущей скорости ленты V(t).
При раздельном измерении составляю- Ю щих ДУ«(0 и ДКв(0 входящих в выражение (1), для определения факта проскальзывания ленты, вызванного факторами второй группы, достаточно найти разность AV - - ДУ(0 и определить ее знак, где - допустимое отклонение текущего значения скорости ленты V(t). При sign{&V on - Al/XOK 0 величина проскальзывания больше допустимой.
Поскольку физически непосредственному измерению поддается только переменная V(t), то выделение составляющих ) и ДУХ/) возможно следующим образом. Колебания величин &VM(t) и ДУд(/) не являются симметричными, это объясняется гем обстоятельством, что превышение скоростью ленты
15
рости V(t), обусловленные факторами второй 25 величины о в силу свойств электроприво30
35
40
группы, как высокочастотную составляющую колебаний скорости ДУХО- ее спектральный состав (спектральная плотность SAUB(CO) будет определяться следующим выражением
Лл2(со)5/г(со),(7)
где АГ(Й) - амплитудно-частотная характеристика механической системы «лента - натяжной барабан, в которую входят лента и натяжной барабан;
Sf (to)-спектральная плотность изменения факторов второй группы. Вид зависимостей 54„в(со) и Д|(ш) показан на фиг. 2.
Очевидно, что диапазон частот, в котором 5ду6(сй) 0 не превосходит диапазона частот, где ЛЛ(со)-0) т. е. соз J «4, причем минимальная частота спектра высокочастотных колебаний равна или больше максимальной частоты спектра низкочастотных колебаний, т. е. , причем обычно coi. Таким образом, максимальную частоту спектра низкочастотных колебаний мож- 45 но принять равной максимальной частоте полосы пропускания механической системы электродвигатель - натяжной барабан, минимальную частоту спектоа высокочастотных колебаний принимают равной или большей максимальной частоты спектра низкочастотных колебаний, а максимальную частоту спектра высокочастотных колебаний принимают равной или меньшей максимальной частоты полосы пропускания механической системы лента - натяжной барабан. Спектральная плотность постоянной величины У о при со Ф О, т. е. S00 (o)) 0. Таким образом, спектральная плотность 5и(ш) текущей скорости V(t) полностью определяется
да и механической системы электропривод - приводной барабан - лента - натяжкой барабан менее вероятны, чем ее снижение относительно VQ.
Графики плотностей вероятности Р„, PavH и Pat,,, величин V(t), ДУл{0 и ДУ«(0 соответственно представлены на фиг. 3.
Математическое ожидание (среднее значение) скорости движения ленты определяется выражением
V J«Purdv,
1 Q . 1
где Vmax - практически возможное максимальное значение текущей скорости V(t).
Математическое ожидание (среднее значение) колебаний низкочастотной составляющей скорости определяется выражением
ДУ„ dV,
(10)
50
55
а математическое ожидание колебаний высокочастотной составляющей скорости определяется выражением
и ДУ &VePbvBdv.(И)
Во
Плотности вероятностей Р, Рд и PAV& имеют близкий друг к другу вид, причем К I/O, Д#„ 0, ДУв 0.
Математическое ожидание (среднее значение) высокочастотных изменений скорости, характеризующее проскальзывание ленты, может быть определено следующим образом. На коротком интервале времени высокочастотные колебания скорости близки к гармони0
спектральными плотностями ее низкочастотной и высокочастотной составляющих S.H 5л„, (со) + S. ()(8)
Поскольку составляющие выражения (5) имеют разный спектральный состав, случайные низкочастотные и высокочастотные составляющие текущей скорости могут быть разделены частотной фильтрацией сигнала текущей скорости ленты V(t).
При раздельном измерении составляю- щих ДУ«(0 и ДКв(0 входящих в выражение (1), для определения факта проскальзывания ленты, вызванного факторами второй группы, достаточно найти разность AV - - ДУ(0 и определить ее знак, где - допустимое отклонение текущего значения скорости ленты V(t). При sign{&V on - Al/XOK 0 величина проскальзывания больше допустимой.
Поскольку физически непосредственному измерению поддается только переменная V(t), то выделение составляющих ) и ДУХ/) возможно следующим образом. Колебания величин &VM(t) и ДУд(/) не являются симметричными, это объясняется гем обстоятельством, что превышение скоростью ленты
5
5 величины о в силу свойств электропривовеличины о в силу свойств электроприво
да и механической системы электропривод - приводной барабан - лента - натяжкой барабан менее вероятны, чем ее снижение относительно VQ.
Графики плотностей вероятности Р„, PavH и Pat,,, величин V(t), ДУл{0 и ДУ«(0 соответственно представлены на фиг. 3.
Математическое ожидание (среднее значение) скорости движения ленты определяется выражением
35
V J«Purdv,
1 Q . 1
где Vmax - практически возможное максимальное значение текущей скорости V(t).
Математическое ожидание (среднее значение) колебаний низкочастотной составляющей скорости определяется выражением
ДУ„ dV,
(10)
а математическое ожидание колебаний высокочастотной составляющей скорости определяется выражением
и ДУ &VePbvBdv.(И)
Во
Плотности вероятностей Р, Рд и PAV& имеют близкий друг к другу вид, причем К I/O, Д#„ 0, ДУв 0.
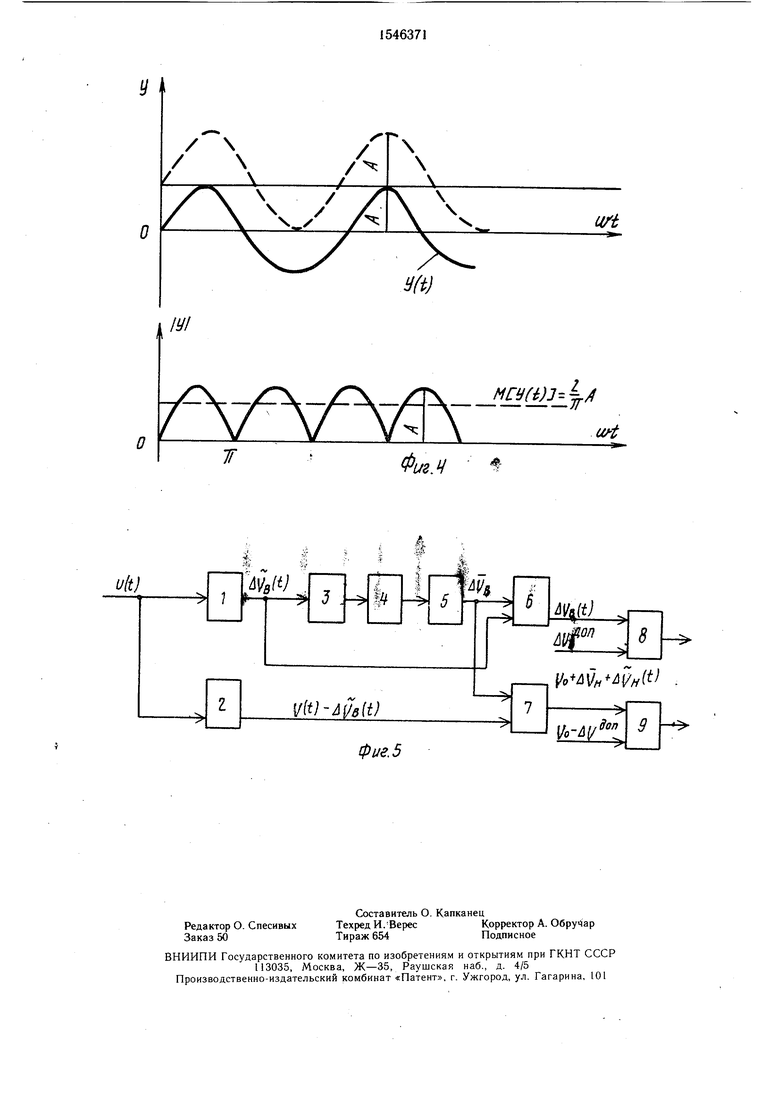
Математическое ожидание (среднее значение) высокочастотных изменений скорости, характеризующее проскальзывание ленты, может быть определено следующим образом. На коротком интервале времени высокочастотные колебания скорости близки к гармоническим, кроме того, текущее значение скорости V(t) можно рассматривать как огибающую этих высокочастотных колебаний, т. е. составляющую Ко + ДКи (/) (фиг. 1) можно рассматривать как верхнюю границу высокочастотных колебаний скорости, поскольку значения V(t) практически только в весьма редких случаях могут превышать величину Ко + ДКм + АКн(/).
Очевидно, что математическое ожидание гармонических колебаний некоторой вели- чины y(t), смещенных по оси ординат относительно нуля на величину амплитуды их колебаний А, равно
МШ -&$ (А + Asino t)d() A,
.
(12)
где А - амплитуда колебаний величины Ј/(/); Т - интервал времени оценки математического ожидания.
Математическое же ожидание модуля колебаний величины y(t) определяется выражением
j оэТ
званного факторами второй группы, так и величина ДКН(/) является мерой снижения скорости ленты, вызванного факторами первой группы. Поэтому для определения величины снижения скорости, вызванного фак- 20 торами первой группы, необходимо в соответствии с выражением (1) из величины текущей скорости V(t) вычесть высокочастотную составляющую колебаний скорости AVe(t) и затем осуществить преобразования
AW)I1 -tff- () в соответствии с выражениями (4), (5) и (3);
А ° ,SА,°, К(0-АК8((0-(( +
d() -§-cos ut t -Ј-(со5я - coso) + АК„ + ДК„(t) + Al/e + ДУз(0 - Д ,.„,-АКв( + АК„(0.(15)
(1)Поскольку 1/о const, то для определения факта снижения скорости ленты, вызванЈ
- 2 А ГЛ
Следовательно, чтобы вычислить значение величины А, достаточно увеличить по- 30 ного факторами первой группы, достаточно
найти разность (К0 + ДКг° ) - (К0 + ДКи (О и определить ее знак. Значения ДКЯ°, ДКм(/) меньше нуля. При sign (V 0 + А Vе0) - - (Ко + ДК„ (t)JI : 0 величина снижения скорости больше допустимой.
Таким образом, предлагаемый способ обеспечивает возможность контроля таких проскальзываний ленты, которые обусловлены внутренними факторами конвейера, определяющими зарождающиеся ч развиваю- Поскольку величина А есть случайная 0 Щиеся дефекты машины и значит эффектилученную в выражении (13) величину в л/2 раз.
Величина же А характеризует и определяет смещение текущих значений центр чо- ванных составляющих высокочастотных к л е- 35 баний скорости ленты относительно верхней огибающей скорости V(t) и значит ределяет величину средней скорости пр скальзывания ленты.
функция времени, то для контроля проскальзывания ленты по изменению параметра А необходимо осуществлять операцию усреднения сигнала на некотором интервале времени
вен при использовании в системах автомагической диагностики зарождающихся дефектов. Кроме того, предлагаемый способ обеспечивает возможность отдельно осуществлять контроль таких снижений ско- Таким образом, среднее значение высо- 45 ленты, которые обусловлены внешними кочасготных колебаний скорости, а именно факторами, не имеющими отношения к дефекту машины.
Устройство работает следующим образом.
Сигнал, пропорциональный текущему
большими вариациями амплитуд и частот 0 значению скорости ленты V(t), поступает на этих колебаний, быстрыми их изменениями,входы фильтров 1 и 2. Фильтр 1 полосовой и
величина А К, может быть определена усреднением по времени
Поскольку высокочастотные колебания скорости ленты обычно характеризуются
г е. как амплитуды, так и частота колебаний случайным образом изменяются во времени, то для повышения точности контвыделяет из входного сигнала V(t) сигнал, соответствующий центрированной высокочастотной случайной составляющей (t).
роля проскальзывания ленты по изменению gg Фильтр 2 низких частот отфильтровывает среднего значения высокочастотных коле-(убирает) из входного сигнала V(t) центрибаний, которое будет являться функцией вре- рованную высокочастотную случайную со- мени, интервал времени усреднения должен быть скользящим и равным + Тс). Знаставляющую АК(г), т. е. формирует„сигнал, соответствующий разности V(i) - ДКа(/).
чение Тс должно быть меньше Т, что допустимо, так как оценивается величина математического ожидания нестационарного процесса и для обеспечения необходимой точности контроля проскальзывания может быть взята близкой или равной обратной величины минимального значения частоты высокочастотного спектра. „Следовательно, с учетом (13) величина ДКл определяется следующим выражением
АКв(/)
Jf
-l+Tt
bV(f)dt.
(14)
гты
Точно гак же, как величина АК) яв- ляется мерой проскальзывания ленты, вызванного факторами второй группы, так и величина ДКН(/) является мерой снижения скорости ленты, вызванного факторами первой группы. Поэтому для определения величины снижения скорости, вызванного фак- 0 торами первой группы, необходимо в соответствии с выражением (1) из величины текущей скорости V(t) вычесть высокочастотную составляющую колебаний скорости AVe(t) и затем осуществить преобразования
в соответствии с выражениями (4), (5) и (3);
выделяет из входного сигнала V(t) сигнал, соответствующий центрированной высокочастотной случайной составляющей (t).
Фильтр 2 низких частот отфильтровывает (убирает) из входного сигнала V(t) центри рованную высокочастотную случайную со-
ставляющую АК(г), т. е. формирует„сигнал, соответствующий разности V(i) - ДКа(/).
Выходной сигнал фильтра 1 поступает на вход блока 3 определения модуля сигнала (f), а с его выхода - на вход блока 4 усреднения. С выхода блока 4 усреднения сигнал поступает на вход блока 5 масштабирования, который осуществляет операцию его увеличения в я/2 раз и, следовательно, выходной сигнал блока 5 масштабирования содержит информацию о средней величине ДУв высокочастотной составляющей скорости.
Сумматор 6 осуществляет операцию сложения поступающих на его входы сигналов от блока 5 масштабирования и фильтра 1 и таким образом формирует в соответствии с выражением (4) сигнал о величине &Vs(t): Al/,(0 AVe + A VXO.
Сумматор 7 осуществляет операцию алгебраического суммирования (вычисления) поступающих на его входы сигналов от фильтра 2 и блока 5 масштабирования V(t) - (В - AV Ко + А V + AV« x x(t) Vo + A VB(0.
Таким образом, сигнал на выходе сумматора 6 пропорционален величине проскальзывания ленты, обусловленной возникшим дефектом конвейера.
В случае достижения сигналом на выходе сумматора 6 предельно допустимого значения (порога срабатывания), определяющего максимально допустимое проскальзывание ДУЈ° ленты ввиду внутренних факторов конвейера, компаратор 8 формирует выходной сигнал, который может быть использован для автоматического управления конвейером.
Сигнал на выходе сумматора 7 пропорционален величине снижения скорости ленты, обусловленного внутренними факторами, которые в совокупности приводят к изменению скорости вращения электропривода конвейера, но не имеют отношения к неисправности конвейера. При достижении сигналом на выходе сумматора 7 предельно допустимого значения (порога срабатыва10
ния), определяющего максимально допустимое снижение скорости ленты из-за внешних факторов, компаратора 9 формирует выходной сигнал, который может быть использован для автоматического управления конвейером.
0
5
0
0
5
0
Формула изобретения
1.Способ контроля проскальзывания и скорости ленты конвейера, основанный на измерении текущего сигнала скорости ленты конвейера и сравнении его с заданным, отличающийся тем, что, с целью повышения надежности контроля проскальзывания и скорости ленты конвейера из сигнала текущей скорости ленты выделяют высокочастотную и низкочастотную составляющие спектры колебаний, сравнивают их с соответствующими заданными уровнями, в случае превышения допустимого уровня высокочастотной составляющей формируют сигнал управления, соответствующий проскальзыванию ленты конвейера, а в случае превышения допустимого уровня низкочастотной составляющей формируют сигнал управления скоростью ленты.
2.Способ по п. 1, отличающийся тем, что в качестве высокочастотной и низкочастотной составляющих спектра колебаний принимают сумму соответствующих средних и текущих центрированных значений колебаний скорости ленты.
3.Способ по п. 2, отличающийся тем, что среднее центрированное значение колебаний скорости ленты определяется как усреднение по времени модуля текущего центрированного значения колебаний скорости ленты в интервале времени усреднения.
4.Способ по п. 3, отличающийся тем, что интервал времени усреднения устанавливают скользящим и равным обратной величине минимального значения частоты высокочастотной составляющей спектра колебаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1988 |
|
SU1574513A1 |
| Устройство контроля смещения ленты конвейера | 1989 |
|
SU1616847A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1987 |
|
SU1479394A1 |
| Устройство контроля скорости ленты конвейера | 1989 |
|
SU1752687A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Способ контроля работоспособности ленточного конвейера и устройство для его осуществления | 1988 |
|
SU1555240A1 |
| Устройство контроля работоспособности ленточного конвейера | 1989 |
|
SU1759758A1 |
| Устройство контроля смещения ленты конвейера | 1990 |
|
SU1740282A1 |
| ДИНАМИЧЕСКИЙ МОНИТОРИНГ МОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745984C1 |
Изобретение относится к автоматизации конвейерного транспорта и предназначено для контроля проскальзывания и скорости лент транспортирующих машин непрерывного действия для перемещения сыпучих материалов в различных областях производства. Цель изобретения - повышение надежности контроля проскальзывания и скорости ленты конвейера. Для этого из сигнала текущей скорости ленты выделяют высокочастотную составляющую (ВЧС) и низкочастотную составляющую (НЧС) спектра колебаний и сравнивают их с соответствующими заданными уровнями. В случае превышения допустимого уровня ВЧС формируют сигнал управления, соответствующий проскальзыванию ленты конвейера. При превышении допустимого уровна НЧС формируют сигнал управления скоростью ленты. В качестве ВЧС и НЧС спектра колебаний принимают сумму соответствующих средних и текущих центрированных значений кол
шумейко иван алексеевич
соловьева вера анатольевна
шилов василий борисович+2068610тIрреR11 198092 ленинград, ивана черных 411 198260 ленинград, стойкости 2/11-227
11 190068 ленинград, наб.крюкова
,йОП
A WtfiftJ
Фиг.1
i
М,И
%()
4,V;
/
о
W
Фиг,
А1//У О
5мМ
иг
Щ
У
У
О
О
Фиг.Ч
| Устройство для управления ленточным конвейером | 1980 |
|
SU910508A1 |
| Способ контроля скорости конвейерной ленты | 1980 |
|
SU977320A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
