25
Изобретение относится к области 15 бработки металлов давлением, а имено к устройствам для подачи и съема аготовок в многопозиционных прессах, может быть использовано в любой отасли машиностроения, 20
Цель изобретения - уменьшение габаритов устройства и повьш ение без- опасности работы путем исключения срабатывания пресса при нахождении захватов в зоне пресса.
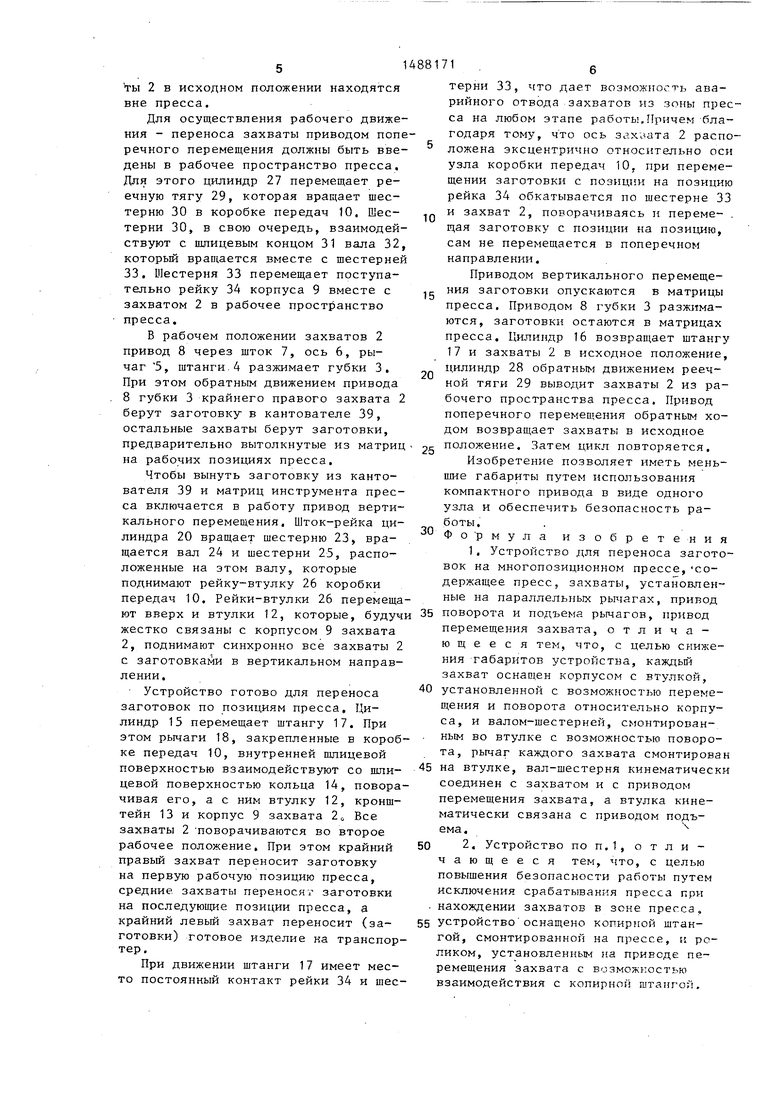
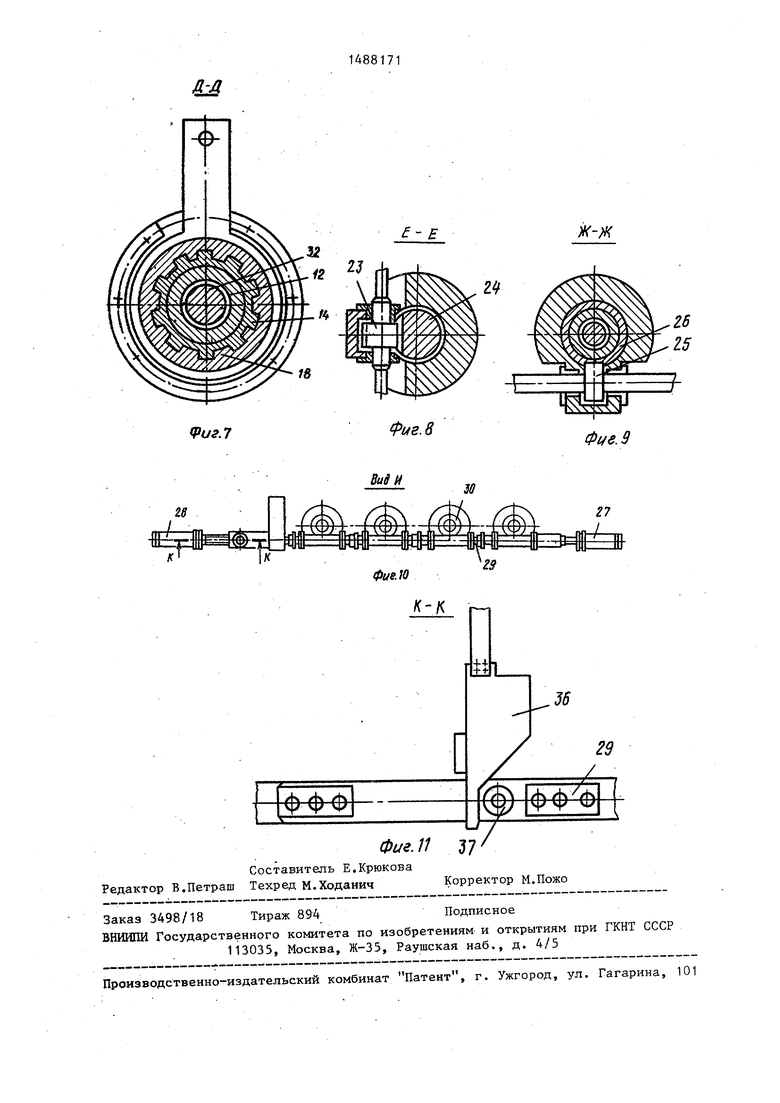
На фиг,1 изображено устройство, вид сверху; на фиг,2 - вид А на фиг,1; на фиг,3 - кинематическая схема устройства; на фиг.4 - вид Б на фиг,2; на фиг,5 - разрез В-В на фиг,1;30 на фиг,6 - вид Г на фиг,5;на фиг.7 - разрез Д-Д на фиг,5; на фиг,8 - разрез Е-Е на фиг,6; на фиг,9 - разрез Ж-Ж на фиг,6; на фиг, 1,0 - вид И на фиг,1; на фиг,11 - разрез К-К на 5 фиг,10,
Устройство для переноса заготовок в многопозиционном прессе 1 содержит ряд синхронных приводных захватов 2, имеющих раздвижные губки 3, закре - до ленные на шарнирно установленных коромыслах 4, связанных рычагами 5, шарнирно закрепленными на оси 6 щтока 7 привода 8 разжима захватов. Шток 7 и привод 8 размещены в корпу- дз се 9, Захваты 2 оснащены коробками передач 10, количество которых соответствует количеству захватов.
Коробка передач имеет корпус 11, в котором размещена втулка 12,имею- -Q щая возможность вращательного и осевого перемещения. Втулка 12 жестко связана посредством кронштейна 13 с корпусом 9 захвата 2, На втулке 12 жестко насажено кольцо 14 с шлицевой наружной поверхностью. Привод поперечного перемещения захватов 2 выполнен в виде цилиндров 15 и 16, штоки Которых связаны общей штангой 17,
55
5
5 0
0 5
о дз
-Q
55
На штанге 17.шарнирно закреплены рычаги 18, число которых соответствует числу захватов 2, Другим концом рычаги 18 закреплены в коробке передач 10, Этот конец рычага имеет внутреннюю шлицевую нарезку, которая взаимодействует с шлицевой нарезкой кольца 14,
Привод вертикального перемещения захватов 2 выполнен в виде цилиндров 19 и 20, штоки 21 и 22 которых связаны шестерней 23, вращающей общий для всех захватов вал 24, на котором расположены шестерни 25, взаимодействующие с рейками 26, закрепленными на втулках 12 коробки передач 10, Привод продольного перемещения захватов 2 осуществляется от цилиндров 27 и 28, имеюшими общую реечную тягу 29, взаимодействующую . с шестернями 30, размещенными в коробке передач 10,
Шестерни 30 взаимодействует с шлицевым концом 31 вала 32, размещенного внутри втулки 12, На другом конце вала 32 закреплена шестерня 33, взаимодействующая с рейкой 34, выполненной на корпусе захвата 2, На ползуне 35 пресса имеется копир- ная штанга 36, имеющая возможность аварийного взаимодействия с роликом 37, установленным на тяге 29, Загрузка заготовки в крайний захват 2 осуществляется подающим механизмом, состоящим из рольганга 38, кантователя 39 и привода 40 кантователя. Выгрузка готового изделия из пресса осуществляется транспортирующим устройством 41 ,
Устройство работает следующим образом.
Заготовка по рольгангу 38 подается в кантователь 39, который приводом 40 наклоняется для передачи заготовок в крайний правый захват 2, Все захва ты 2 в исходном положении находятся вне пресса.
Для осуществления рабочего движения - переноса захваты приводом поперечного перемещения должны быть введены в рабочее пространство пресса. Для этого цилиндр 27 перемещает реечную тягу 29, которая вращает щес- терню 30 в коробке передач 10. Шее- терни 30, в свою очередь, взаимодействуют с шлицевым концом 31 вала 32, который вращается вместе с шестерней 33. Шестерня 33 перемещает поступательно рейку 34 корпуса 9 вместе с захватом 2 в рабочее пространство пресса.
В рабочем положении захватов 2 привод 8 через шток 7, ось 6, рычаг 5, штанги. 4 разжимает губки 3. При этом обратным движением привода 8 губки 3 крайнего правого захвата 2 берут заготовку в кантователе 39, остальные захваты берут заготовки, предварительно вытолкнутые из матриц на рабочих позициях пресса.
Чтобы вынуть заготовку из кантователя 39 и матриц инструмента пресса включается в работу привод вертикального перемещения. Шток-рейка цилиндра 20 вращает шестерню 23, вращается вал 24 и шестерни 25, расположенные на этом валу, которые поднимают рейку-втулку 26 коробки передач 10. Рейки-втулки 26 перемещают вверх и втулки 12, которые, будуч жестко связаны с корпусом 9 захвата 2, поднимают синхронно все захваты 2 с заготовками в вертикальном направлении.
Устройство готово для переноса заготовок по позициям пресса. Цилиндр 15 перемещает штангу 17. При этом рычаги 18, закрепленные в короб ке передач 10, внутренней шлицевой поверхностью взаимодействуют со шли- цевой поверхностью кольца 14, поворачивая его, а с ним втулку 12, кронштейн 13 и корпус 9 захвата 2 Все захваты 2 поворачиваются во второе рабочее положение. При этом крайний правый захват переносит заготовку на первую рабочую позицию пресса, средние захваты переносят заготовки на последующие позиции пресса, а крайний левый захват переносит (за-
готовки) готовое изделие на транспортер.
При движении штанги 17 имеет место постоянный контакт рейки 34 и шес
1488171 .6
терни 33, что дает возможность аваQg
5
5
0 5
0
рийного отвода захватов из зоны пресса на любом этапе работь Л1ричем благодаря тому, что ось зах1шта 2 расположена эксцентрично относительно оси узла коробки передач 10, при перемещении заготовки с позиции на позицию рейка 34 обкатывается по шестерне 33 и захват 2, поворачиваясь и переме- . щая заготовку с позиции на позицию, сам не перемещается в поперечном направлении.
Приводом вертикального перемещения заготовки опускаются в матрицы пресса. Приводом 8 губки 3 разжимаются, заготовки остаются в матрицах пресса. Цилиндр 16 возвращает штангу 17 и захваты 2 в исходное положение, цилиндр 28 обратным движением реечной тяги 29 выводит захваты 2 из рабочего пространства пресса. Привод поперечного перемептения обратным ходом возвращает захваты в исходное положение. Затем цикл повторяется.
Изобретение позволяет иметь меньшие габариты путем использования компактного привода в виде одного узла и обеспечить безопасность работы. Фо рмула изобретения
1. Устройство для переноса заготовок на многопозиционном прессе,-содержащее пресс, захваты, установленные на параллельных рычагах, привод поворота и подъема рычагов, привод перемещения захвата, отличающееся тем, что, с целью снижения габаритов устройства, каждьй захват оснащен корпусом с втулкой, установленной с возможностью перемещения и поворота относительно корпуса, и валом-шестерней, смонтированным во втулке с возможностью поворота, рычаг каждого захвата смонтирован на втулке, вал-шестерня кинематически соединен с захватом и с приводом перемещения захвата, а втулка кинематически связана с приводом под;ъ- ема.
2, Устройство по П.1, отличающееся тем, что, с целью повышения безопасности работы путем исключения срабатывания пресса при нахождении захватов в зоне пресса,, устройство оснащено копирной штангой, смонтированной на прессе, и роликом, установленным на приводе перемещения Захвата с возможностью взаимодействия с копирной штангой.
15
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО И ПРЕДНАЗНАЧЕННАЯ ДЛЯ НЕГО ПРИВОДНАЯ СИСТЕМА ДЛЯ МНОГОПОЗИЦИОННЫХ ПРЕССОВ С АВТОМАТИЧЕСКОЙ ПЕРЕДАЧЕЙ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1988 |
|
RU2020073C1 |
| УСТРОЙСТВО для ЗАГРУЗКИ ЗАГОТОВОК в РАБОЧУЮ ЗОНУ МНОГОПОЗИЦИОННОГО ПРЕССА | 1972 |
|
SU343876A1 |
| СИСТЕМА ДЛЯ ИСПОЛЬЗОВАНИЯ СОВМЕСТНО С ПРЕССОМ ДЛЯ ШТАМПОВКИ ИЗДЕЛИЯ | 1990 |
|
RU2030239C1 |
| Грейферное устройство для перемещения заготовок к многопозиционному прессу | 1986 |
|
SU1349854A1 |
| Устройство для перемещения заготовки | 1981 |
|
SU986549A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Автооператор | 1969 |
|
SU344701A1 |
| Грейферное подающее устройство к прессу | 1989 |
|
SU1676724A1 |
| Грейферная подача к многопозиционномупРЕССу | 1979 |
|
SU841736A1 |
Изобретение относится к обработке металлов давлением, а именно к устройствам для переноса заготовок на многопозиционных прессах. Цель изобретения - снижение габаритов устройства и повышение безопасности работы. Каждый захват оснащен корпусом 11 с втулкой 12 и валом 32 с шестерней 33, установленным с возможностью взаимодействия с корпусом захвата. Втулка 12 кинематически связана с приводом подъема и на ней смонтирован кронштейн 13, соединяющий корпус захвата с втулкой 12. Вал 32 кинематически связан с приводом поворота корпуса захвата. Устройство оснащено копирной планкой, смонтированной на прессе, и роликом, установленным на приводе перемещения захвата. При повороте кронштейна 13, установленного на втулке 12, происходит обкатывание корпуса захвата вокруг шестерни 33 и дополнительное перемещение захвата из зоны пресса, а при опускании пуансона пресса ролик, установленный на приводе перемещения захвата, взаимодействует с копирной линейкой и исключает повреждение пресса. 1 з.п.ф-лы, 11 ил.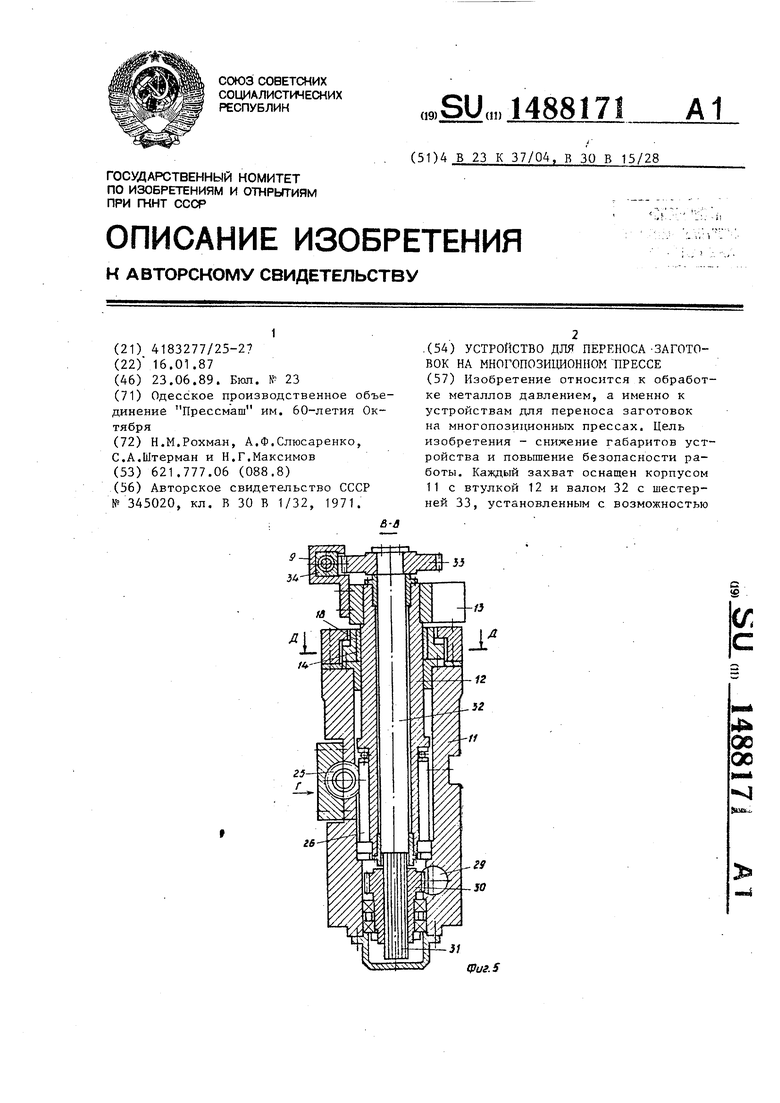
ВидА noBeflf t/rrto
tPug.S
W
--L
4J pV . ± я
Вид Г
иг,1
28
Фие.11 37
Составитель Е.Крюкова Редактор В.Петраш Техред М.Ходанич Корректор М.Пожо
Заказ 3498/18 Тираж 894Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
)К-Ж
Риг.В
.9
Вид tt
27
Фие.Ю
К-К
35
29
| МНОГОПОЗИЦИОННЫЙ ГИДРАВЛИЧЕСКИЙ ПРЕСС | 0 |
|
SU345020A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
