сд
о
о ;о
Изобретение относится к транспортным устройствам шагового перемещения изделий.
Цель изобретения - повышение надежности работы конвейера.
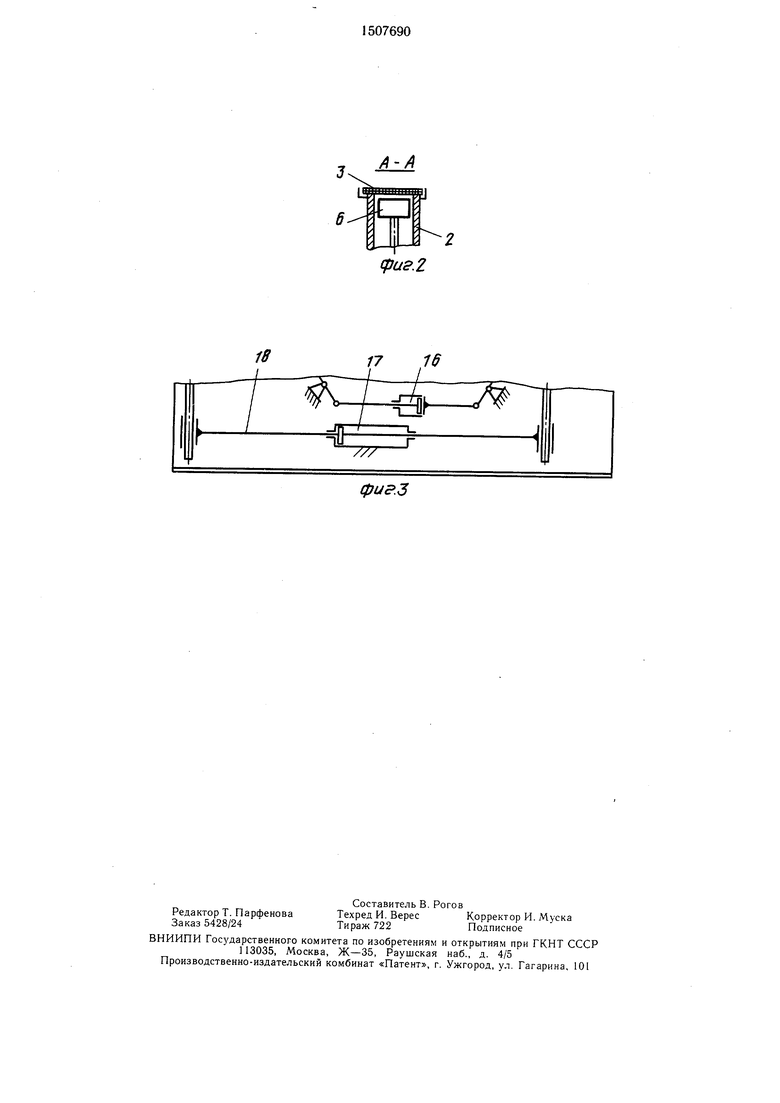
На фиг. 1 изображена кинематическая схема предлагаемого конвейера; на фиг. 2 - разрез А-А на фиг. ; на фиг. 3 - вариант с использованием пневмопривода.
Шагающий конвейер содержит расположенную на основании 1 неподвижную коробчатую раму 2 с фиксаторами для изделий 3. На неподвижной раме 2 шарнирно установлены поворотные рычаги 4, на концах которых на осях закреплены опорные ролики 5, по которым с возможностью возвратно- ;поступательного перемещения установлена подвижная П-образная рама б, расположенная в подвижной вертикальной направляющей 7. Для перемещения подвижной П-об- разной рамы 6 в вертикальной и горизонтальной плоскостях имеются реверсивные кривошипно-щатунные приводы 8 и 9.
Поворотные рычаги 4 имеют на верхних концах вилки 10, в которых расположена |подвижная плита 11. На осях опорных ро- ;ликов 5 установлены с возможностью пере- Ыещения по подвижной плите 11 направляю- идие ролики 12. На подвижной плите 11 за- |креплен постоянный магнит 13, а магнит 14 закреплен на нижней части подвижной П- образной рамы 6 с возможностью взаимодействия с магнитом 13 подвижной плиты П. Длина магнита 13 на подвижной плите 11 меньше шага перемещения подвижной рамы 6, а магниты 13 и 14 обращены друг к другу разноименными полюсами. Для сохранения ориентации подвижной плиты 11 имеют- |ся упоры 15. Сила притяжения между маг10
зан) в гнездо неподвижной рамы 2. После этого срабатывает кривошипно-шатунный привод 9 и подвижная рама 6 с изделиями 3 поднимается на опорных роликах 5. Одновременно перемещается вверх и плита 11 за счет взаимодействия магнитов 13 и 14. По сигналу бесконтактного датчика 20 включается кривошипно-щатунный привод 8 горизонтального перемещения подвижной рамы 6. При этом зазор между магнитами остается постоянным и сила взаимодействия между магнитами 13 и 14 не изменяется на протяжении всего горизонтального шага, что обеспечивает постоянство силового замыкания на роликах 5 и 12 и нормальную 5 работу направляющих 7. После окончания горизонтального перемещения по сигналу датчика 19 производится опускание подвижной рамы 6.
Цикл перемещения изделия по замкнутой прямоугольной траектории продолжается до тех пор, пока изделие 3 не придет на позицию разгрузки.
20
25
30
Формула изобретения
Шагающий конвейер, содержащий расположенную на основании неподвижную раму, шарнирно установленные на неподвижной раме поворотные рычаги, на концах которых на осях закреплены опорные ролики, установленную с возможностью возвратно- поступательного перемещения по опорным роликам подвижную раму, расположенную в подвижной вертикальной направляющей, и приводы перемещения подвижной рамы в вертикальной и горизонтальной плоскостях, отличающийся тем, что, с целью повыщения
нитами 13 и 14 больше суммарного веса под- 35 надежности работы конвейера, он снабжен |вижной плиты 11 и магнита 13, что обеспе- чивает равномерность силового замыкания |на опорных роликах 5, при котором плита 11 поджата к роликам 12.
подвижной плитой, установленными на осях опорных роликов направляющими роликами и двумя магнитами, один из которых закреплен на подвижной плите, а другой - на нижней части подвижной рамы и установлен с возможностью взаимодействия с магнитом подвижной плиты, причем поворотные рычаги выполнены в виде вилок, в которых расположена подвижная плита, при этом направляющие ролики установлены с возможностью перемещения по подвижной плите, причем длина магнита на подвижной плите не менее шага перемещения подвижной рамы, а магниты обращены друг к другу разноименными полюсами.
Для другого исполнения конвейера в качестве приводов могут использоваться подвешенный на поворотных рычагах 4 пнев- моцилиндр. 16 и жестко установленный цилиндр 17 с двухсторонним штоко.м 18. В качестве датчиков обратной связи используются бесконтактные датчики 19 и 20.
Конвейер работает следующим образом.
Изделие 3 подается на позицию загрузки и укладывается .манипуляторо.м (не пока
зан) в гнездо неподвижной рамы 2. После этого срабатывает кривошипно-шатунный привод 9 и подвижная рама 6 с изделиями 3 поднимается на опорных роликах 5. Одновременно перемещается вверх и плита 11 за счет взаимодействия магнитов 13 и 14. По сигналу бесконтактного датчика 20 включается кривошипно-щатунный привод 8 горизонтального перемещения подвижной рамы 6. При этом зазор между магнитами остается постоянным и сила взаимодействия между магнитами 13 и 14 не изменяется на протяжении всего горизонтального шага, что обеспечивает постоянство силового замыкания на роликах 5 и 12 и нормальную 5 работу направляющих 7. После окончания горизонтального перемещения по сигналу датчика 19 производится опускание подвижной рамы 6.
Цикл перемещения изделия по замкнутой прямоугольной траектории продолжается до тех пор, пока изделие 3 не придет на позицию разгрузки.
Формула изобретения
Шагающий конвейер, содержащий расположенную на основании неподвижную раму, шарнирно установленные на неподвижной раме поворотные рычаги, на концах которых на осях закреплены опорные ролики, установленную с возможностью возвратно- поступательного перемещения по опорным роликам подвижную раму, расположенную в подвижной вертикальной направляющей, и приводы перемещения подвижной рамы в вертикальной и горизонтальной плоскостях, отличающийся тем, что, с целью повыщения
надежности работы конвейера, он снабжен
надежности работы конвейера, он снабжен
подвижной плитой, установленными на осях опорных роликов направляющими роликами и двумя магнитами, один из которых закреплен на подвижной плите, а другой - на нижней части подвижной рамы и установлен с возможностью взаимодействия с магнитом подвижной плиты, причем поворотные рычаги выполнены в виде вилок, в которых расположена подвижная плита, при этом направляющие ролики установлены с возможностью перемещения по подвижной плите, причем длина магнита на подвижной плите не менее шага перемещения подвижной рамы, а магниты обращены друг к другу разноименными полюсами.
/4-/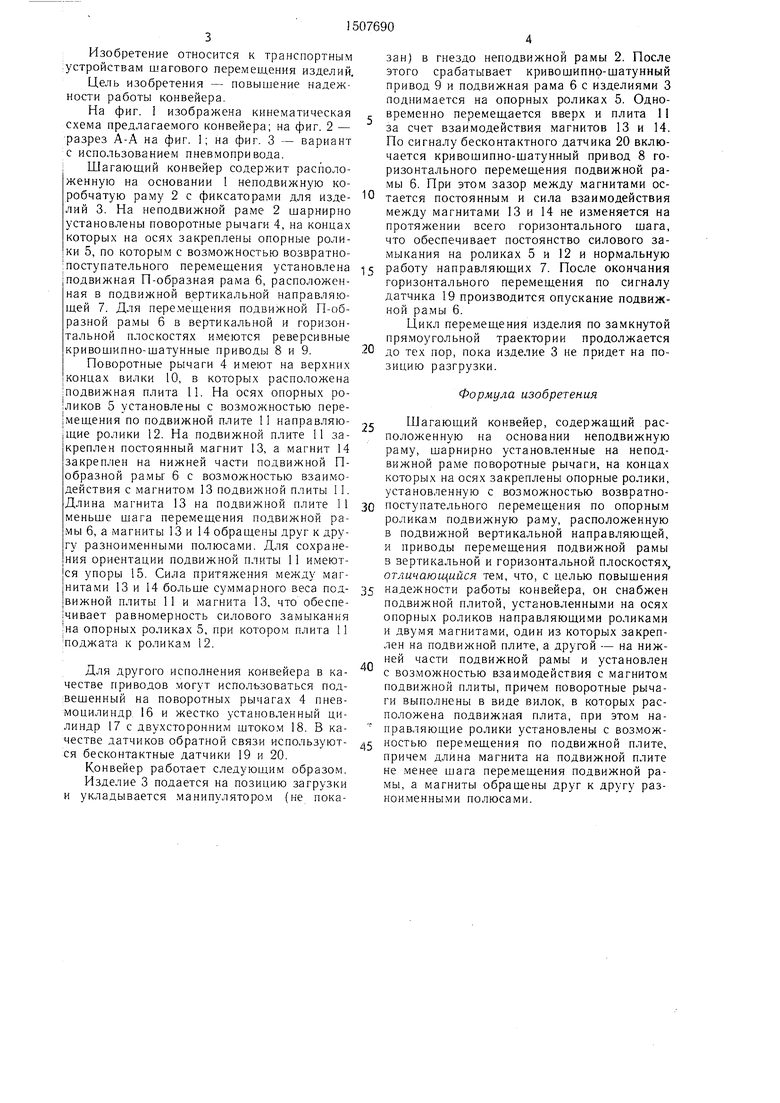
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| Устройство для расформирования стопок ящиков | 1973 |
|
SU545546A1 |
| МАШИНА ДЛЯ ПРЕССОВАНИЯ КОРПУСОВ КОНФЕТ | 2003 |
|
RU2253287C2 |
| Шагающий конвейер | 1980 |
|
SU905165A1 |
| Шаговый конвейер | 1980 |
|
SU912606A1 |
| Конвейер для межоперационного перемещения изделий | 1981 |
|
SU994373A1 |
| Шагающий конвейер | 1981 |
|
SU988690A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ЗАКРЫВАНИЯ И ОТКРЫВАНИЯ МЕТАЛЛИЧЕСКИХ ФОРМ | 1966 |
|
SU185020A1 |
| Шагающий конвейер-накопитель | 1985 |
|
SU1270075A1 |
| Шагающий конвейер | 1987 |
|
SU1465379A1 |
Изобретение относится к транспортным устройствам шагового перемещения изделий. Цель изобретения - повышение надежности работы конвейера. На основании 1 расположена неподвижная рама (Р) 2. На Р 2 шарнирно установлены поворотные рычаги 4, на концах которых на осях закреплены опорные ролики 5. С возможностью возвратно-поступательного перемещения по роликам 5 установлена подвижная Р 6, расположенная в подвижной вертикальной направляющей 7. На основании 1 размещены приводы перемещения Р 6 в вертикальной и горизонтальной плоскостях. Поворотные рычаги 4 выполнены в виде вилок 10, в которых расположена подвижная плита (П) 11. На осях роликов 5 установлены направляющие ролики 12 с возможностью перемещения по П 11. На П 11 закреплен один из магнитов (М) 13, а другой М 14 - на нижней части Р 6 с возможностью взаимодействия с М 13. Длина М 13 на П 11 не менее шага перемещения Р 6, а М 13 и М 14 обращены друг к другу разноименными полюсами. Изделие 3 устанавливается на Р 2. Привод 9 поднимает Р 6 с изделиями. Одновременно за счет взаимодействия М 13 и М 14 перемещается П 11. Привод 8 осуществляет горизонтальное перемещение Р 6. Зазор между М 13 и М 14 не изменяется на протяжении всего горизонтального шага. По окончании горизонтального перемещения производится опускание Р 6. 3 ил.
(риг. 2
фиаЗ
| Шаговый конвейер | 1979 |
|
SU867799A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
