702 II fOn I
гг Ь
Ч
ел
to
315П
Изобретение относится к проьп.шшен- ному транспорту, в частности к устройствам управления ролнковьпчи и цепными секциями конвейеров для перемеще- ния тарио-штучных грузов, и может быть использовано; в тарно-распреде- лительных зонах экспедицией автоматизированных складов, а также в автоматизированных системах управления технологическими процессами (АСУ ТП) и автоматизированных технологических комплексах АТК) различных отраслей промышленности, где требуется автономное несинхронное перемещение гру- зов, ее фиксированный останов на любой секции транспортной сети, автоматическое локальное накопление, распределение и сбор грузов, а также в качестве локальных систем управления для разветвленных грузораспредели- тельных систем.
Цель изобретения - расширение функциональных возможностей и повышение надежности.
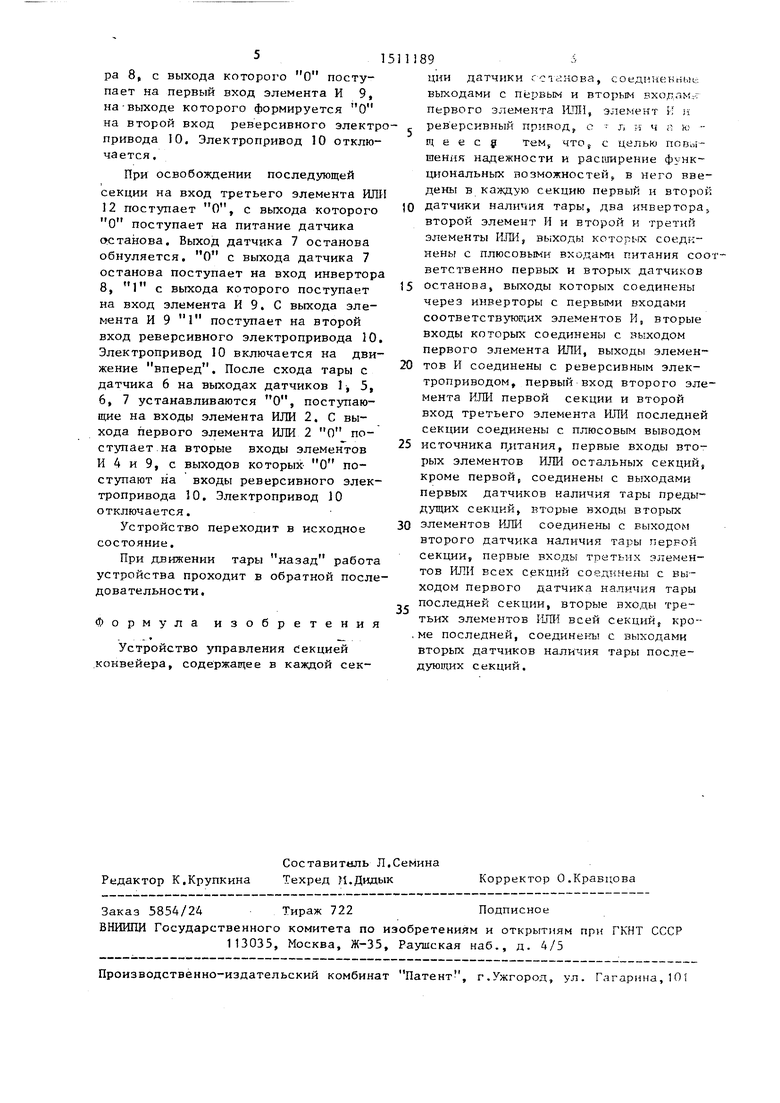
На чертеже представлена функциональная схема устройства для 3-сек- ционного разомкнутого конвейера.
Устройство содержит в каждой секции первый датчик 1 останова, первый элемент ИЛИ 2, первый инвертор 3, первый элемент И 4, первый датчик 5 Наличия тары, второй датчик 6 наличия тары, второй датчик 7 останова, второй инвертор 8, второй эле- мент И 9, реверсивный электропривод 10, второй П и третий 12 элементы ИЛИ,
Датчик 1 останова подключен выхо- дом к первому входу первого элемент H.THi 2 и входу инвертора 3, Выход инвертора 3 подключен к- первому входу элемента И 4, Датчик 5 наличия тары подключен выходом к третьему входу элемента ИЛИ 2 и к выходу второго элемента 1 1 ИЛИ последующей секции. Датчик 6 наличия подключен выходом к четвертому входу элемента ИЛИ 2 и к выходу элемента 12 предыдущей секции. Датчик 7 останова подключен выходом к второму входу элемента ИЛИ 2 и к входу инвертора 8, выход инвертора 8 подсоединен к первому входу элемента И 9, выходы элементов И 4 и И 9 подсоединены к входам реверсивного электропривода 10, Выходы элементов ИЛИ II и 12 соединены с плюсовым входом питания датчиков I и
5 0 5 0
5
5
0 5 0 5
Выходы датчиков 5 соединены с входами элементов ИЛИ 1 последующих секций. Выходы /датчиков 6 соединены с входами элементов ИЛИ 12 предыдущих секций.
Устройство работает следующим образом,
С датчиков 1,5,6,7 поступает О на. входы элемента ИЛИ 2, с выхода элемента ИЛИ 2 на вторые входы элементов И 4 и 9 поступает О, На реверсивный электропривод 10 О поступает с выходов элементов И 4 и 9 - электропривод 10 выключен, С выхода датчика 6 наличия тары на вход третьего элемента ИЛИ 12 пре- дыдзпцей секции поступает О, разрешая движение тары вперед, При движении вперед тара наезжает на датчик 5 наличия тары, который вьщает 1 на один из входов первого элемента ИШ 2, На выходе элемента ИЛИ 2 формируется , которая поступает на входы элементов И 4 и 9. С выхода датчика 5 наличия тары предыдущей секции поступает 1 на один из вхо- . дов элемента ИЛИ 11, С выхода элемента ИЛИ П 1 поступает на плюсовой вход питания датчика останова, с выхода которого - на инвертор 5, С инвертора 3 О поступает на первый вход элемента И 4, с -выхода которого О поступает на первый вход реверсивного электропривода, С выхода датчика 7 останова О поступает на вход инвертора 8, с выхода которого на Первый вход элемента И 9 поступает 1, При этом на обоих входах элемента И 9 присутствуют 1, На выходе элемента И 9 формируется I, которая поступает на второй вход реверсивного электропривода 10, Реверсивный электропривод 10 включается на движение вперед.
При наличии тары на последующей секции на второй вход третьего элемента ИЛИ 12 подается 1, с выхода которого I поступает на питание датчика 7. По мере продвижения груза (тары) поочередно срабатывают датчики, наличия 5, 6 тары, при этом с выхода элемента И 9 на вход реверсивного электропривода 10 постоянно поступает 1 и электропривод поддерживает движение вперед. При перекрытии тарой датчика 7 1 с выхода датчика 7 поступает на вход инверто515111
pa 8, с выхода которого О поступает на первый вход элемента И 9, на-выходе которого формируется О на второй вход реверсивного электро- , привода 10. Электропривод 10 отключается.
При освобождении последующей секции на вход третьего элемента ИЛН
12 поступает О, с выхода которого О поступает на питание датчика останова. Выход датчика 7 останова обнуляется. О с выхода датчика 7 останова поступает на вход инвертора 8, 1 с выхода которого поступает на вход элемента И 9. С выхода элемента И 9 1 поступает на второй вход реверсивного электропривода 10. Электропривод 10 включается на движение вперед. После схода тары с датчика 6 на выходах датчиков 1, 5, 6, 7 устанавливаются О, поступающие на входы элемента ИЛИ 2. С выхода первого элемента ИЛИ 2 О поступает на вторые входы элементов И 4 и 9, с выходов которых О поступают на входы реверсивного электропривода 10. Электропривод 10 отключается.
Устройство переходит в исходное состояние.
При движении тары назад работа устройства проходит в обратной последовательности .
Формула изобретения
Устройство управления Секцией конвейера, содержащее в каждой сек
,
10
89
ции датчики сстанова, соедннекпь выходами с первым и вторым зходлмг; первого злемекта ICTI, элемент И ji рев ерсквный привод с - Xj и ч ;5 ю - щ е е с g TeMj что, с целью повышения надежности и расширение функциональных возможностей,, в него вве- день в каждую секцию первый и второй датчики наличия тары, два нивертора второй элемент И и второй и третий элементы ИЛИ, которьгх соединены с плюсовыми входамтл питания соответственно первых и вторых датчиков
5 останова, выходы которых соединены через инверторы с первыми входаь и соответствующих элементов И, вторые входы которых: соединены с выходом первого элемента ИЛИ, выходы элемен0 тов И соединены с реверсивным электроприводом. Первый вход второго элемента ИЛИ Первой секции и второй вход третьего элемента КИИ последней секции соединены с плюсовым выводом
5 источника п,итания, первые входы вторых элементов ИЛИ остальных секций, кроме первойf соединены с выходами первых датчиков наличия тары предыдущих секций, вторые входы вторых элементов ИЛИ соединены с выходом второго датчика наличия тары первой секции, первые входы третьих элементов ИЛИ всех секций соединены с выходом первого датчика наличия тары последней секции, вторые входы третьих элементов 1ШК всей секций; кроме последней, соединены с выходами вторых датчиков наличия тары последующих с екций.
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| Устройство для адресования подвижного объекта | 1988 |
|
SU1558821A1 |
| БЕСКОНТАКТНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ И КОНТРОЛЯ ГОРОЧНОЙ СТРЕЛКИ | 2014 |
|
RU2578837C1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для управления реверсивным электроприводом | 1991 |
|
SU1833840A1 |
| Вентильный электропривод | 1984 |
|
SU1262679A2 |
| Устройство для управления линейным асинхронным двигателем капсульного трубопроводного транспорта | 1979 |
|
SU789356A1 |
| Устройство для измерения длины движущегося текстильного материала | 1988 |
|
SU1589039A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
Изобретение относится к автоматизации погрузочно-разгрузочных работ. Цель - повышение надежности и расширение функциональных возможностей. В устройство, содержащее датчики 1 и 7 останова, элемент ИЛИ 2, элемент И 4 и реверсивный электропривод 10, введены дополнительно элементы ИЛИ 11 и 12, элемент И 9, инверторы 3 и 8 и датчики 5 и 6 наличия тары. С датчиков 6 наличия тары сигнал поступает на вход элемента ИЛИ 12 предыдущей секции, включается движение вперед. При наезде тары на датчик 5 наличия тары он выдает сигнал на элемент ИЛИ 2 и на вход элемента ИЛИ 11 последующей секции. С выхода элемента 11 сигнал поступает на вход питания датчика 1 останова и через инвертор 3 на элемент И 4 и на привод 10. Аналогично проходит сигнал с датчика 7. Электропривод включается на движение вперед. При занятости следующей секции на элемент ИЛИ 12 поступает сигнал с датчика 6 наличия последующей секции, включается датчик 7 останова и через инвертор 8 и элемент И 9 происходит отключение электропривода 10. 1 ил.
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU949641A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления конвейера | 1977 |
|
SU1102739A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
