СП
о to vl
Изобретение относится к вычислительной технике и может быть использовано в специализированных вычислителях, осуществляющих преобразование координат.
Целью изобретения является расши- ренле класса решаемых задач путем выполнения преобразования гиперболических координат в декартовы.
Па фиг, 1 представлена функциональная схема преобразователя; на фиг, 2 - пример реализации узла связи координат; на фиг, 3 -.пример системы координат, д
Преобразователь содержит регистр 1 первой исходной координаты, регистр 2 второй исходной координаты, коммутатор 3, сумматор 4, первый Зо и второй 5„2 умножители, узел 6 связи координат и вычитатель 7,
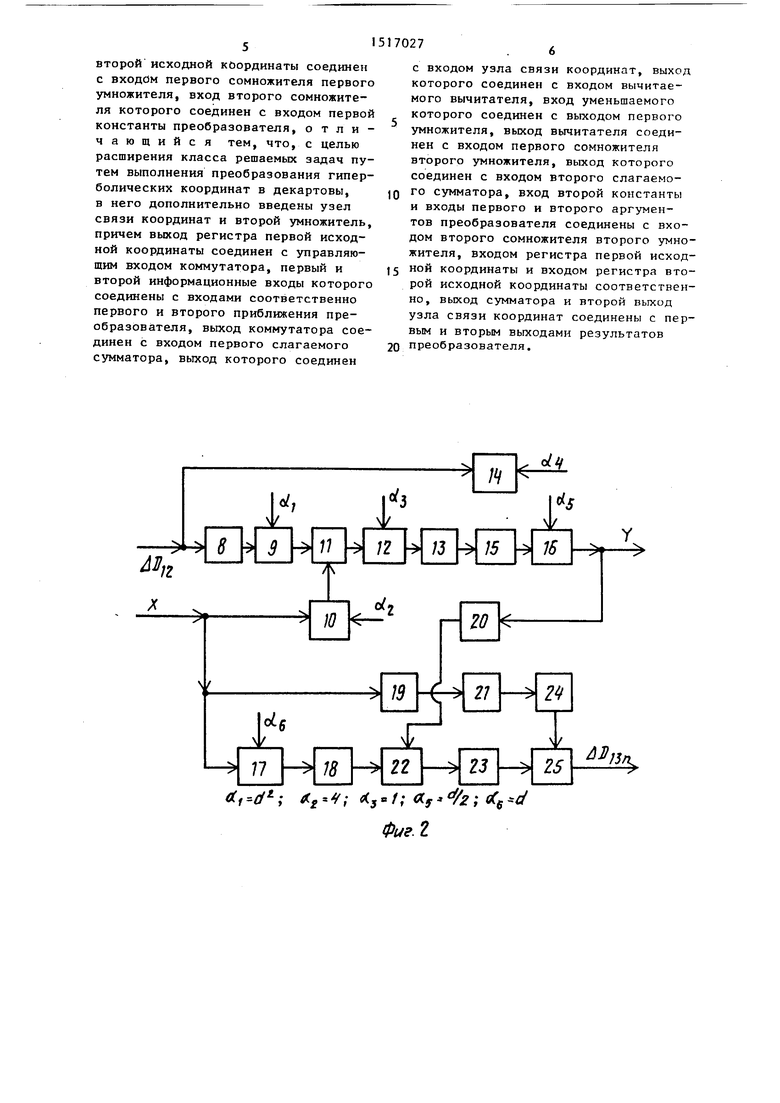
Узел связи координат содержит первый квадратор 8, первый вычитатель 9, псрвьш умножитель 10, делитель П первьш сумматор 12, первый блок 13 извлечения квадратного корня, второй 14 и третий 15 умножители, вто- poi сут-шатор 16, второй вычитатель 17, второй 18, третий 19 и четвертый 20 ь вадраторы, третий 21 и четвертый 22 сумматоры, второй 23 и третий 24 йлоки извлечения квадратного корня и третий вычитатель 25
Преобразователь работает следующим образом.
Преобразование гиперболических координат в декартовые,
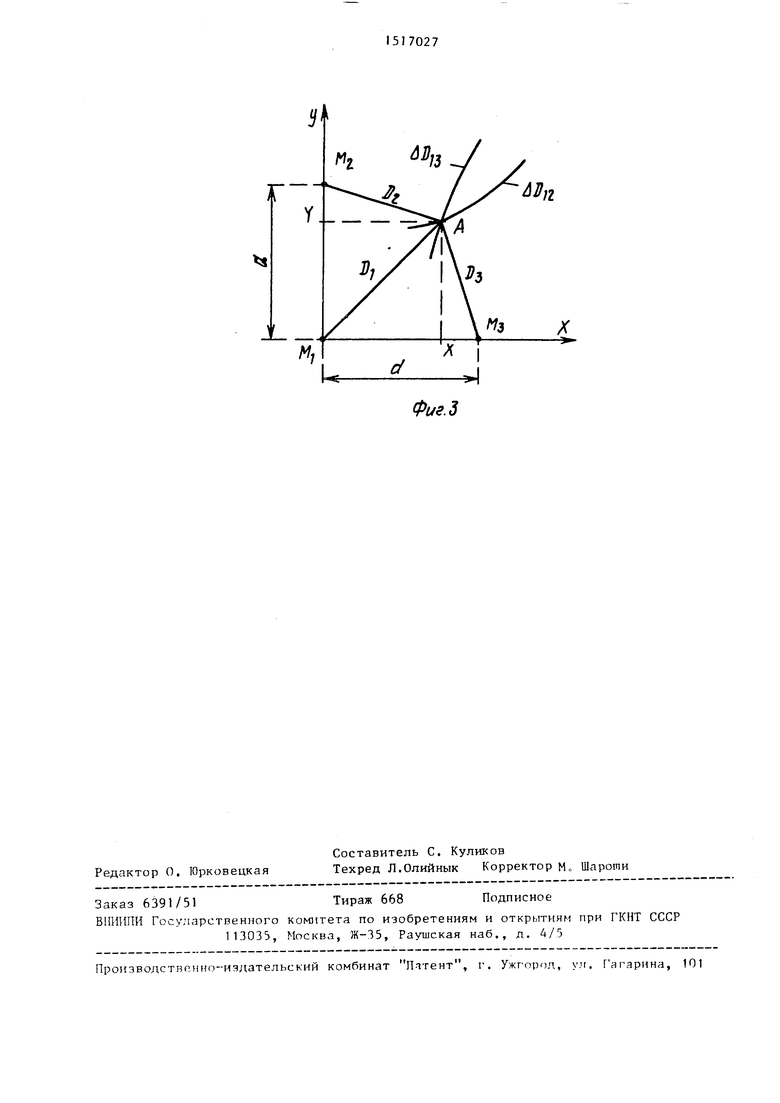
В соответствии с принципами работы пшерболической системы по кодам разностей времени приходов сигналов L,, и L ,, от маяков М ,М 2 и М ,М , (фиг. 3) и скорости сигнала С опрецеляют и представляют в регист- значелия двух исходных координат - разности дальностей йТ) , и .П),,:,
-Df2
С С
I П -
11 и, D,1
Л I) ,3 Ь t 13 и ,- JLJj ,
PC з льтир 1ощие декартовы luribi объекта X, Y связаны с 1-г- 1-: системой уравнений
Из (2) может быть получена явная зависимость Y F(X), реализуемая в узле 6 связи координат:
1
1 +
4Х
(3)
10
По X и Y можно рассчитать
do
1Эп
, Y)
15
- J(d - Х) + Y
(А)
Ошибку (f I) определяет вычитатель 7
JD dD,3 - ЛТ
t3n
(5)
20
Значение результирующей декартовой координаты X на каждом шаге определяет сумматор 4:
25
X Х(, +сГХ; ГХ ,
(6)
где К - постоянный коэффициент умно- жеиия г5 D в умножителях 5,1 и 5о2, Значения V определяют как
Vo
0,25d, 4Di3 О, 0,75d, dD,j О,
(7)
что реализуется с помощью коммутатора,
В рассмотренном примере К 2 К, К, 1 (фиг, 1), Можно сравнивать 4D;,j не с измеренным ДГ)-,з домно- женным в первом умножителе 5 о 1 на
константу К 1 С кодом , причем 1Кг1 l/(/J, ( fl), где /3,
.ЭРг 3Ft Fi dV avT к равен знаку ( /5, /Зд)
В функциональном преобразователе для других систем исходных и результирующих координат зависимости F,, 7 будут другими, однозначно определяемыми этими системами координат
Формула
изобретения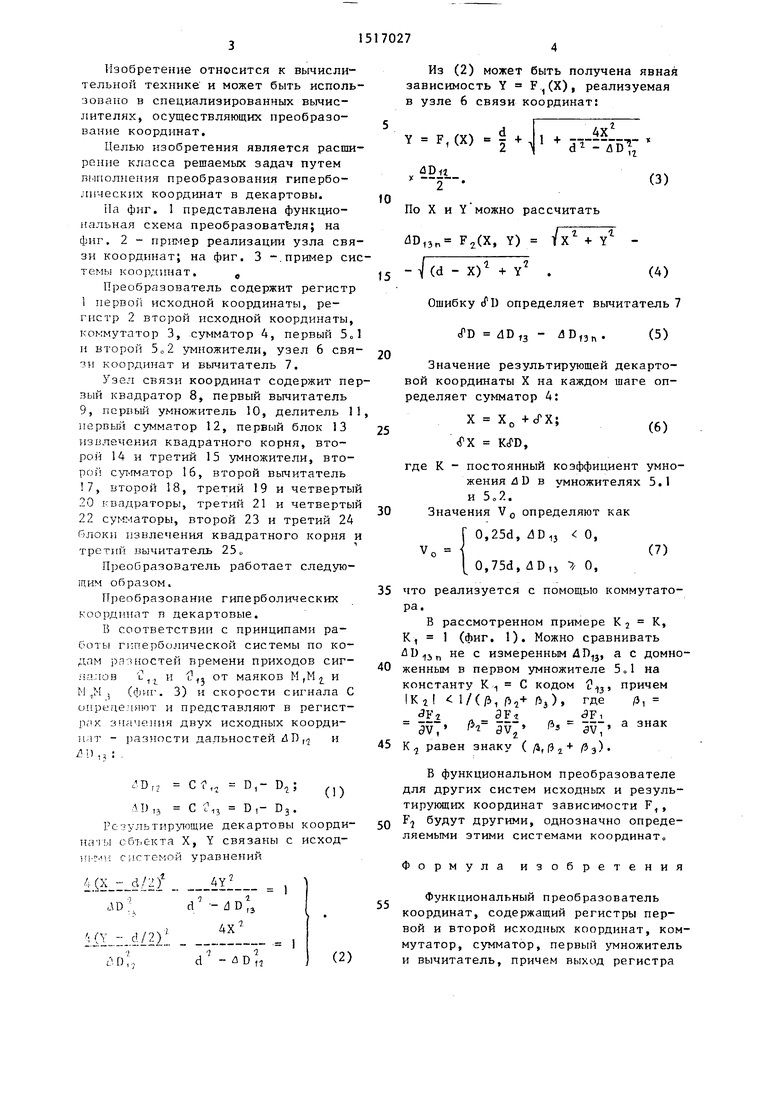
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат | 1990 |
|
SU1800455A1 |
| Устройство для преобразования координат | 1989 |
|
SU1681313A1 |
| Устройство для вычисления координат | 1989 |
|
SU1635178A1 |
| Устройство для нахождения оптимального вектора решения системы линейных неравенств | 1985 |
|
SU1315996A1 |
| Вычислительное устройство | 1989 |
|
SU1691837A1 |
| Цифровой преобразователь координат | 1985 |
|
SU1315971A1 |
| Преобразователь координат | 1990 |
|
SU1784976A1 |
| Устройство для определения местоположения транспортного средства | 1987 |
|
SU1481801A1 |
| Инкроментный умножитель аналоговых сигналов | 1982 |
|
SU1057970A1 |
| Устройство для умножения и деления | 1986 |
|
SU1376082A1 |
Изобретение относится к вычислительной технике и может быть использовано в специализированных вычислителях, осуществляющих преобразование координат в системах навигации, числового управления станками, роботами-манипуляторами. Целью изобретения является расширение класса решаемых задач путем выполнения преобразования гиперболических координат в декартовы. Преобразователь содержит регистр 1 первой исходной координаты, регистр 2 второй исходной координаты, коммутатор 3, сумматор 4, первый умножитель 5. 1, второй умножитель 5. 2, узел 6 связи координат, вычитатель 7. 3 ил.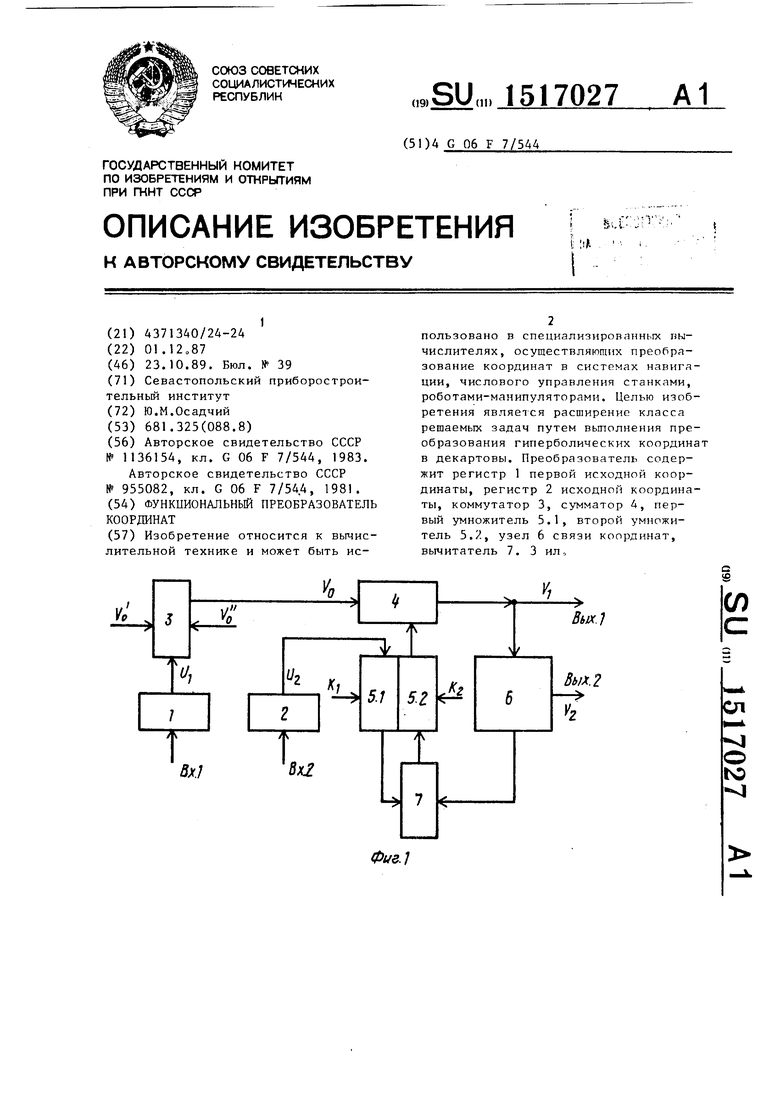
(2)
Функциональный преобразователь координат, содержащий регистры первой и второй исходных координат, коммутатор, сумматор, первый умножитель и вычитатель, причем выход регистра
второй исходной координаты соединен с входом первого сомножителя первого умножителя, вход второго сомножителя которого соединен с входом первой константы преобразователя, отличающийся тем, что, с целью расширения класса решаемых задач путем выполнения преобразования гиперболических координат в декартовы, в него дополнительно введены узел связи координат и второй умножитель, причем выход регистра первой исходной координаты соединен с управляющим входом коммутатора, первый и второй информационные входы которого соединены с входами соответственно первого и второго приближения преобразователя, выход коммутатора соединен с входом первого слагаемого сумматора, выход которого соединен
Л. 3-t; (e-f
Фиг. 2
с входом узла связи координат, выход которого соединен с входом вычитаемого вычитателя, вход уменьшаемого которого соединен с выходом первого умножителя, выход вьгчитателя соединен с входом первого сомножителя второго умножителя, выход которого соединен с входом второго слагаемого сумматора, вход второй константы и входы первого и второго аргументов преобразователя соединены с входом второго сомножителя второго умножителя, входом регистра первой исходной координаты и входом регистра второй исходной координаты соответственно, выход сумматора и второй выход узла связи координат соединены с первым и вторым выходами результатов
преобразователя.
f
Фиг.З
| Функциональный преобразователь | 1983 |
|
SU1136154A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Цифровой функциональный преобразователь | 1980 |
|
SU955082A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
