(Л
Изобретение относится к машиностроению, а именно к шарнирно-рычажным механизмам для математических операций, и найдет применение, в частности в качестве наглядного пособия в учебных процессах.
Цель изобретения - расширение кинематических возможностей механизма.
На чертеже показана кинематическая схема механизма.
Механизм содержит основание 1 с параллельными прямолинейными направля- нощми 2 и 3, установленные в них ползуны 4 и 5 и поворотную кулису 6, камень 7 которой шарнирно связан с ползуном 4, а ось вращения пересечена с продольной осью направляющей 2. Ползуны 4 и 5 жестко связаны между собой прямолинейным стержнем 8, перпендику- лярньм направляю1цим 2 и 3. В направляющей 2 установлен третий ползун 9, а с камнем 7 кулисы 6 жестко связана перпендикулярная ей вторая кулиса 10, камень 11 которой шарнирно связан с ползуном 9. Расстояние Л между направ ляющй aI 2 и 3 задается конструктивно.
Механизм работает следующим образом.
С помощью стержня 8 перемещают в требуемом диапазоне ползуны 4 и 5 по нанравляюсщм 2 и 3. При этом кулиса 6 перемещается по своему камню 7 и одновременно поворачивается на некоторый угол е/ вокруг оси 0. Кулиса 10
поворачивается на такой же угол вокруг оси А, при этом перемещается ее камень 11, а вместе, с ним по направляющей 2 перемещается ползун 9. При фиксации ползунов 4 и 5 в любом положении ОС atg и СВ actg d , откуда очевидно, что ОВ а (tgo( + ctg о ),
Формула изобретения
Кулисно-рычажный механизм для получения суммы тангенса и котангенса, содержащий основание с двумя параллельными прямолинейными направляющими, два ползуна, установленных в соответствующих направляющих, и установленную на основании поворотную первую кулису, камень которой шарнирно связан с одним из ползунов, отличающийся тем, что, с целью расширения кинематических возможностей, ось вращения кулисы пересечена с продольной осью направляющей, в которой установлен второй ползун, а механизм снабжен прямолинейным стержнем, предназначенным для жесткой связи ползунов и расположенным перпендикулярно направляющим, третьим ползуном, установленным в той же направляющей, что и второй ползун, и второй кулисой, которая перпендикулярна первой кулисе и жестко связана с ее камнем, при этом камень второй кулисы шарнирно связан с третьим ползуном.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулисный механизм Мамырина для получения суммы секанса и косеканса | 1987 |
|
SU1517043A1 |
| Кулисно-рычажный механизм Мамырина для преобразования окружности в кривую 6-го порядка | 1987 |
|
SU1504427A1 |
| Шарнирно-рычажный механизм | 1988 |
|
SU1566127A1 |
| Пространственный шарнирно-рычажный механизм | 1985 |
|
SU1421921A1 |
| Шарнирно-рычажный механизм прерывистой подачи | 1986 |
|
SU1364797A1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1988 |
|
SU1518602A1 |
| Кривошипно-ползунный механизм | 1989 |
|
SU1626025A1 |
| Шарнирно-рычажный направляющий механизм | 1988 |
|
SU1573269A1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1990 |
|
SU1793136A1 |
| Кривошипно-кулисный механизм с остановками | 1985 |
|
SU1260610A1 |
Изобретение относится к шарнирно-рычажным механизмам для математических операций и найдет применение, в частности, к качестве наглядного пособия в учебных процессах. Цель изобретения - расширение функциональных возможностей механизма. С помощью стержня 8 перемещают ползуны 4 и 5, при этом кулисы 6 и 10 поворачиваются на угол α. После фиксации ползунов 4 и 5 в требуемом положении имеем, что ОС=ATGΑ и СВ=ACTGΑ, а ОВ = A(TGΑ+CTGΑ). 1 ил.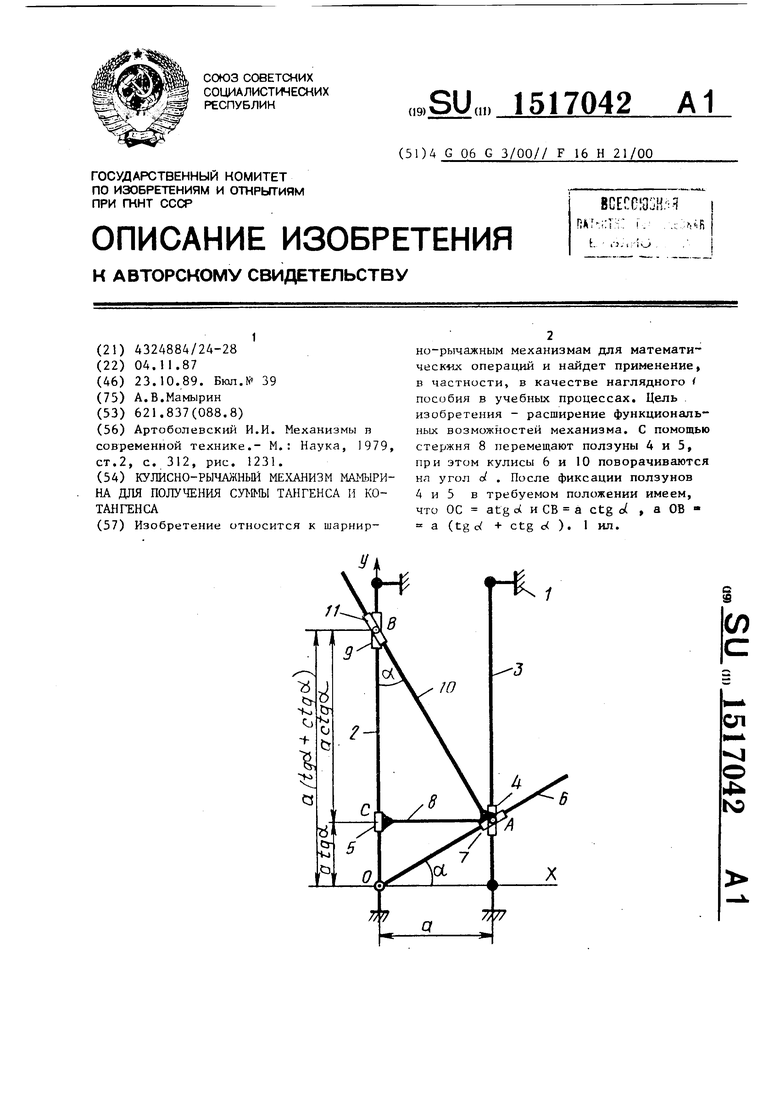
| Артоболевский И.И | |||
| Механизмы н современной технике.- М.: Наука, 1979, ст.2, с | |||
| Способ обработки шкур | 1921 |
|
SU312A1 |
| Станок для гнутья целых деревянных ободьев | 1921 |
|
SU1231A1 |
