Изоб)счение относится к машиностроению, а более конкретно к устройствам для лажима :uiroTOBOK, и может быть использовано в автоматизированных системах.
Це.чьк) изобретения яв.тется улучшение эксплуатационных характеристик путем обеспечения более точной ориентации заготовки относительно ус гаповочно оси и возможности иснользовапия тиског в автоматизированных системах.
На чертеже приведены тиски, общий вид.
Тиски содержат корпус 1 с направляю- 1ЦИ.МИ 2. но. 1зупы 3 и 4 с губками 5 и 6. привод 7 с пе)вым штоком 8, допол- нительны(1 привод 9 с вгорым 1птоком 10 и кои I )о.1ьно-управляк)П1ую систему 11, вклк)члк):пую датчики 12 и широкодианазон- ный э,1ек гро ический Н1аговый привод К, свя.данный с дополнительным нри- водом 9. Привод 7 закреплен на но.тзу- не 4, а его IHTOK 8 свои.м свободны.м конпом 14 на ползуне 3. Дополнительный приви;, 9 закреплен также на ползуне 4, а его ип ок К) свои.м свободным конном 15 на корнусе 1.
lllroKit 8 и К) расположены в тисках na)a,i.-ie. ibH().
Гпски работают следук)П1им образом.
а:нчп 1 загоювки 16 и ее ориентация 1 р 1 г;|)си-|елы1о с -ановочной ба.овой осн нро- 1 10 ГС я I-; контро.1ьно-упра в.чяюшей системе II с Ч:1У. Пос. Н установки 3ai o- ioBKn Ih и THCKii I KOHT|)o, ihHO-yнрав.чяю- ihAiii системч И поступает CHi Ha. i на зажим. Под де(1С1вием привода 7 ползуны 3 , 4 1-Г).1ижак)тся и губки г) н В зажи.мают ||( |Г1ШК И). Перемешенне 1Л бок 5 и ti фик0
0
5
0
сируется латчика.ми 12 линейного иеремеп1е- ния. Количество импульсов, поступающее от датчиков 12 линейнок) неремепАепия. сравнивается контрольно-управляющей системой 1 1 с ЧПУ. В случае несовпал.епия оси 17 заготовки 16 после зажима с установочной базовой осью датчики 12 линей ного перемеи ения подают соответсчвую Н1ИЙ сигнал в систему ЧПУ, которая посредством широкодиапазонного электрогидравли- чеекого шагового привода 13 приводит в действие дополнительный привод 9, под действием которого ползуны 3 и 4 перемешаются вместе с зажатой в губках 5 и 6 заготовкой 16 по направлякицим 2 относительно корпуса 1 в направлении установочной базовой оси. При совпадении оси 17 заготовки 16 с установочной базовой осью контрольно-унравляклдая система I 1 посредством датчиков 12 линейного нереме- шения дает сигнал на прекращение де)и-т- вия дополнительного привода 9
Формула изобретения
Тиски, содержапще корпус с направляю шими, ползуны с губками, установленные па направлякмпих, привод с штокол. установ, 1енн1)1Й на одном из о, 1зунов, а свободны11 конец 1нтока зак 1е11лен на ползуне, от.тчанициес.ч тем, что. с ,Hi у.-|уч нения эксплуаташи нных )-нс- тик, они снабжены ус i aHOfi. ieHiibi i на (;.iНО.М из ползунов ДОПО;1НИТеЛЬН1 М llpИI.iДO
с вторым HITOKOM, пара,:1ле. ibiibiM iiejJBOM . и закрепленным свобод1 ым конпом i;a ккр- Hvce.
| название | год | авторы | номер документа |
|---|---|---|---|
| Наладка тисков | 1986 |
|
SU1379095A1 |
| Устройство для базирования деталей | 1986 |
|
SU1366357A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Гибкий производственный модуль | 1988 |
|
SU1673395A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ И ЗАКРЕПЛЕНИЯ ТУРБИННЫХ ЛОПАТОК И СПОСОБ ИХ ФРЕЗЕРОВАНИЯ С ПОМОЩЬЮ ЭТОГО УСТРОЙСТВА | 2006 |
|
RU2325985C1 |
| Самоцентрирующие тиски | 1991 |
|
SU1796436A1 |
| Устройство для фиксации камня при его обработке | 1990 |
|
SU1765010A1 |
| Захват манипулятора | 1979 |
|
SU1144293A1 |
| Робототехнологический комплекс | 1987 |
|
SU1585120A1 |
| Тиски | 1985 |
|
SU1310187A1 |
Изобретение относится к устройствам для зажима заготовок и может быть использовано в автоматизированных системах. Целью изобретения является улучшение эксплуатационных характеристик путем обеспечения более точной ориентации заготовки относительно установочной оси и возможности использования тисков в автоматизированных системах. Тиски содержат корпус 1 с направляющими 2, на которых установлены ползуны 3 и 4 с губками 5 и 6, привод 7 со штоком 8, дополнительный привод 9 со штоком 10 и контрольно-управляющую систему 11. Зажим заготовки 16 осуществляется губками 5 и 6 при срабатывании привода 7, который закреплен на ползуне 4, а конец 14 штока 8 - на ползуне 3. Контрольно-управляющая система 11 сравнивает действительное положение оси 17 с установочной базовой осью и в случае несовпадения дает команду на дополнительный привод 9, который перемещает ползуны 3 и 4 с заготовкой 16 до совпадения этих осей. 1 ил.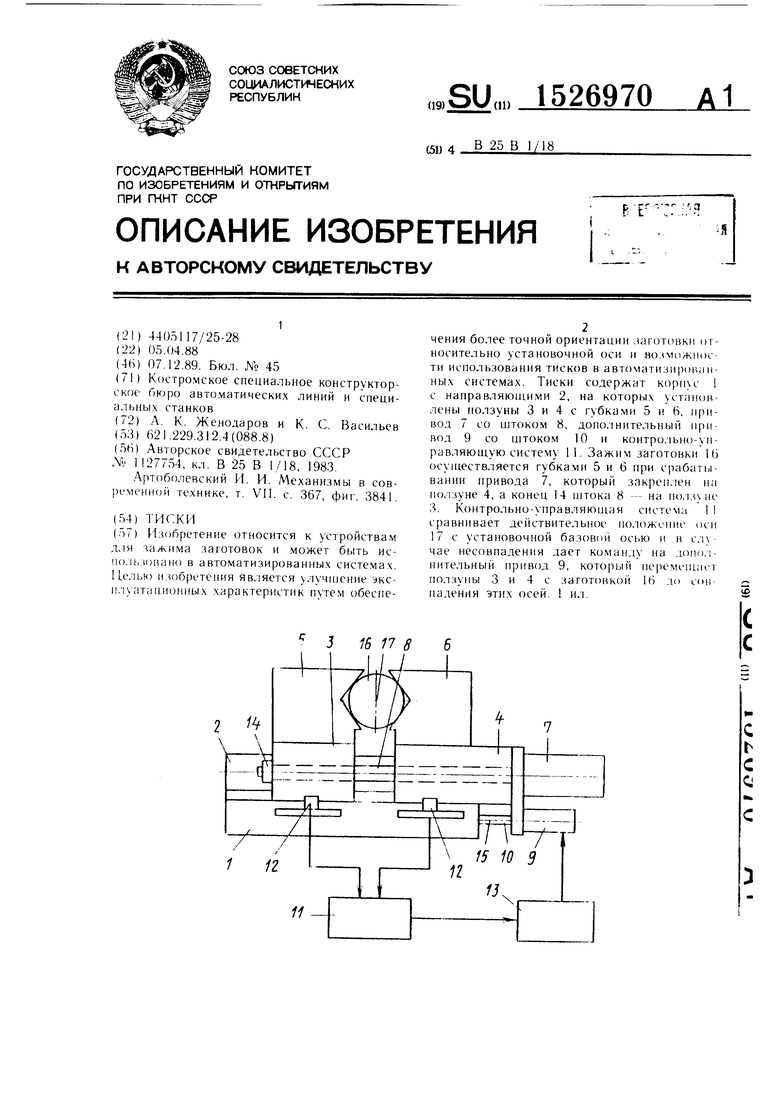
| Захват плавающий | 1983 |
|
SU1127754A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| .Артоболевский И | |||
| И | |||
| Механизмы в современной технике, т | |||
| VII | |||
| с | |||
| Способ отковки в штампах заготовок для спиральных сверл | 1921 |
|
SU367A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ЧУВСТВИТЕЛЬНОСТИ И СИЛЫ КАПСЮЛЕЙ ПУТЕМ ИСПЫТАНИЯ ИХ НА КОПРЕ ИЛИ В КАМЕРЕ СТВОЛА РУЖЬЯ | 1925 |
|
SU3841A1 |
