привода перемещения штанги 4 ролик i 12 проходит под копиром 10, а поводок 11 воздействует упором 14 на полку 13 планки 8, благодаря чему план- ка 8 с захватами 9 опускается и захваты 9 проходят под платами 3. При
выходе ролика 12 из-под копира 10 пружины возвращают планку 8 и поводок 11 в исходное положение. Захваты поднимаются над плоскостью стола 1. Далее цикл работы механизма повторяется. 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ОБРЕЗИНЕННОГО КОРДНОГО ПОЛОТНА | 1990 |
|
SU1757185A1 |
| Механизм шагового перемещения изделий | 1980 |
|
SU894893A1 |
| Устройство для укладки штучныхиздЕлий B КОРОбКи | 1978 |
|
SU839865A1 |
| Грузоподъемная площадка крана штабелера | 1985 |
|
SU1315367A1 |
| Устройство для непрерывной намотки нити | 1983 |
|
SU1137046A1 |
| Конвейер для межоперационного перемещения изделий | 1981 |
|
SU994373A1 |
| Устройство для опрокидывания вагонов | 1990 |
|
SU1791311A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Кантователь блоков цилиндров автомобиля | 1985 |
|
SU1305109A2 |
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |

Изобретение может быть использовано для межоперационного транспортирования интегральных микросхем и микросборок при их производстве. Цель изобретения - повышение надежности и долговечности работы. Механизм шагового перемещения изделий содержит рабочий стол 1 с направляющими 2, на котором расположены транспортируемые платы 3, штангу 4, закрепленную в линейных роликовых подшипниках 5 параллельно направляющим 2. На штанге 4 с помощью втулок 6 и шариковых напрвляющих 7 упруго закреплена планка 8 с захватами 9, установленными на расстоянии друг от друга, кратном заданному шагу перемещения плат 3. На столе 1 смонтирован раздвижной S-образный копир 10. На штанге 4 шарнирно закреплен подпружиненный поводок 11 с роликом 12, взаимодействующим с полкой 13 планки 8 посредством упора 14. При движении штанги 4 в подшипниках 5 захваты 9 сдвигают платы 3 по направляющим 2. Одновременно ролик 12 наезжает на верхнюю поверхность копира. После прохождения копира пружиной поводка 11 ролик 12 возвращается в исходную позицию. После реверса привода перемещения штанги 4 ролик 12 проходит под копиром 10, а поводок 11 воздействует упором 14 на полку 13 планки 8, благодаря чему планка 8 с захватами 9 опускается и захваты 9 проходят под платами 3. При выходе ролика 12 из под копира 10 пружины возвращают планку 8 и поводок 11 в исходное положение. Захваты поднимаются над плоскостью стола 1. Далее цикл работы механизма повторяется. 6 ил.
Изобретение относится к устройствам межоперационного транспортирования в оборудовании для сборки янтег- ральных схем и микросборок.
Цель изобретения - повышение надежности и долговечности работы.
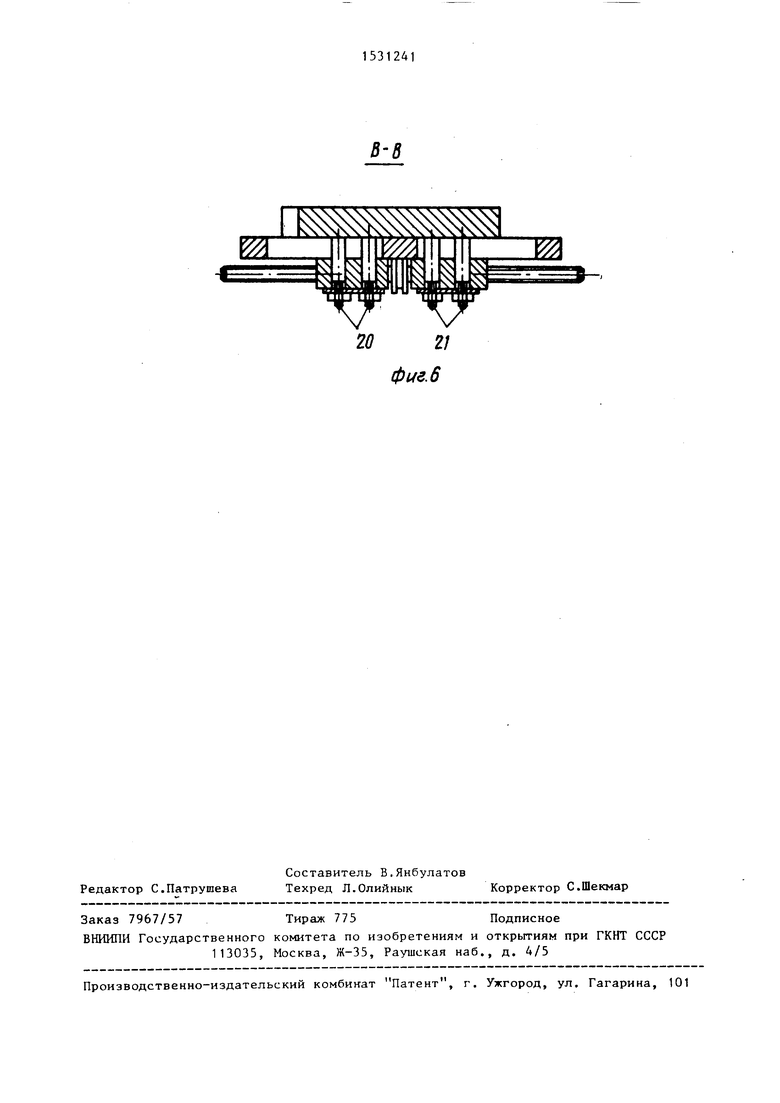
На фиг.1 изображен механизм, вид спереди; на фиг.2 - то же, вид сверху; на фиг.З - разрез А-А на фиг.1; на фиг,А - механизм в аксонометрии; на фиг.З - вид Б на фиг.З; на фиг.6 разрез В-В на фиг.З.
Механизм содержит рабочий стол 1 (фиг,4) с направляющими 2, на котором располагаются транспортируемые платы 3, подвижную штангу 4, закрепленную в линейных роликовых подшипниках 3 параллельно направляюшим 2. На подвижной штанге 4 с помощью втулок 6 с шар1п овыми направляющими 7 закреплена с возможностью встречно- параллельного смещения относительно штанги 4 подпружиненная ;;ланка 8 с рабочими захватами 9, установленными на расстоянии друг .-IT друга, кратном заданному шагу переме....ния плат 3. Н столе 1 смонтирован раздвижной S- образный копир 10 (фиг,4), а на штанге 4 шарр.ирно закреплен подпружиненный поводок 11 с роликом 12, взаимо- действуюп1им с полкой 13 планки В посредством упора 14.
Движение штанги 4 осуществляется от двигателя 13 (фиг.2) через реечную передачу 16 (фиг.З),
Paздв iжнoй копир 10 состоит из двух идентичных деталей 17 и 18 (фиг.З, 6), которые крепятся на пластинах 19 винтами 20 и 21. Раздвигание копира обеспечивается винтом 22,
Движение штанги 4 ограничивается упорами 23.
Механизм работает следуюшим образом.
Перед началом работы рачдви -ается на заданную величину копир 10, за
хваты 9 устанавливаются на расстоянии, определяемом размером плат 3, длина перемещения устанавливается рё- гулируемыми упорами 23.
Включается злектродвигатель 13 (фиг.2) который через реечную передачу 16 (фиг.З) сдвигает вправо штангу 4, а захваты 9 сдвигают вправо по направляющим 2 платы 3. Одновременно ролик 12 наезжает на верхнюю поверхность копира. После проходжения копира пружиной поводка 11 ролик 12 возвращается в исходную позицию. Движе- ние штанги 4 останавливается упорами 23.
После реверса двигателя 13 ролик 12 проходит под копиром 10, а поводок 11 воздействует упором 14 на полку 13 планки 8, благодаря чему планка 8 с захватами 9 опускается, и захваты 9 проходят под платами 3.
При выходе ролика 12 из зоны копира 10 пружины возвращают планку 8 и поводок 11 в исходное положение. Захваты 9 поднимаются над плоскостью стола 11. Далее движение злементов механизма повторяется.
Формула изобретения
Механизм шагового перемещения изделий, содержащий рабочий стол с направляющими, подвижную штангу, подпружиненную к ней пранку с толкателями, копир, закрепленный на рабочем столе, и привод, отличающий- с я тем, что, с целью повьш)ения надежности и долговечности работы механизма, подвижная штанга снабжена шарнирно закрепленным на ней и подпружиненным к ней поводком с роликом на его свободном конце и с упором, причем поводок установлен с возможностью взаимодействия ролика с копиром, а
упора - с планкой, а копир выполнен S-образной формы.
Фия.1
йГ
фи9.5
| Штанговый конвейер | 1976 |
|
SU593981A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Механизм шагового перемещения изделий | 1980 |
|
SU894893A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
