сд
со ю
со
ГчЭ
СЛ
ны микроопераций маскируются содержимым одного из регистров блока 8, что обеспечивает неизменное состояние групп шин микроопераций, управляющих вычислительным процессом, при переходе на сегмент микропрограммы регенерации. Положительный экономический эффект возникает за счет сокращения аппаратных средств, необходимых для памяти и синхронизации данного процесса с вычислительным процессом в
случае управления технологическими объектами, когда один контроллер может быть использован для управления большим количеством управляемых точек объекта, причем при реализации управляющего процесса возникает необходимость по состоянию управляющей среды прерывать выполнение текущей микро- программы с сохранением управляющих сигналов на объектах управления. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный модуль микропрограммного устройства управления | 1984 |
|
SU1273926A1 |
| Микропрограммное устройство управления | 1986 |
|
SU1322282A1 |
| Устройство адресации многопроцессорной вычислительной машины | 1983 |
|
SU1129613A1 |
| Устройство для сопряжения эвм с абонентами | 1984 |
|
SU1215114A1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1997 |
|
RU2111528C1 |
| Процессор | 1983 |
|
SU1213485A1 |
| Устройство микропрограммного управления | 1988 |
|
SU1667070A1 |
| Микропрограммный процессор | 1981 |
|
SU980095A1 |
| Микропрограммное устройство управления | 1982 |
|
SU1091158A1 |
| Микропрограммное устройство управления | 1984 |
|
SU1179338A1 |

Изобретение относится к вычислительной технике. Цель изобретения - сокращение емкости блока памяти микрокоманд за счет уменьшения количества микрокоманд. Микропрограммное устройство управления содержит регистр адреса 1, буферный регистр 2, блок памяти микропрограмм 3, регистр микроопераций 4, первый 5 и второй 9 коммутаторы, блок 6 анализа условий, блок элементов И 10, генератор 7 тактовых сигналов, блок регистров 8. Наиболее эффективно применение устройства, когда требуется по состоянию операционной части автомата или объекта управления оставить группу шин в неизменном состоянии. Данная ситуация возникает в следующих случаях: в устройствах конструктивно и функционально объединенных с памятью динамического типа, когда по сигналу от таймера прерывается выполнение вычислительного процесса. При этом шины микроопераций маскируются содержимым одного из регистров блока 8, что обеспечивает неизменное состояние групп шин микроопераций, управляющих вычислительным процессом, при переходе на сегмент микропрограммы регенерации. Положительный экономический эффект возникает за счет сокращения аппаратных средств, необходимых для памяти и синхронизации данного процесса с вычислительным процессом
в случае управления технологическими объектами, когда один контроллер может быть использован для управления большим количеством управляемых точек объекта, причем при реализации управляющего процесса возникает необходимость по состоянию управляющей среды прерывать выполнение текущей микропрограммы с сохранением управляющих сигналов на объектах управления. 4 ил.
Изобретение относится к вычислительной технике и может быть использовано при построении управляющих систем, а также микропрограммных ав- toMaTOB, в частности, в тех случаях, когда возникает необходимость по состоянию операционной части автомата, управляющего и вычислительного устройства, сохранять неизменным состояние группы выходных шин микро- Операции,
Цель изобретения - сокращение емкости блока памяти микрокоманд за Счет уменьшения количества микрокоманд ,,
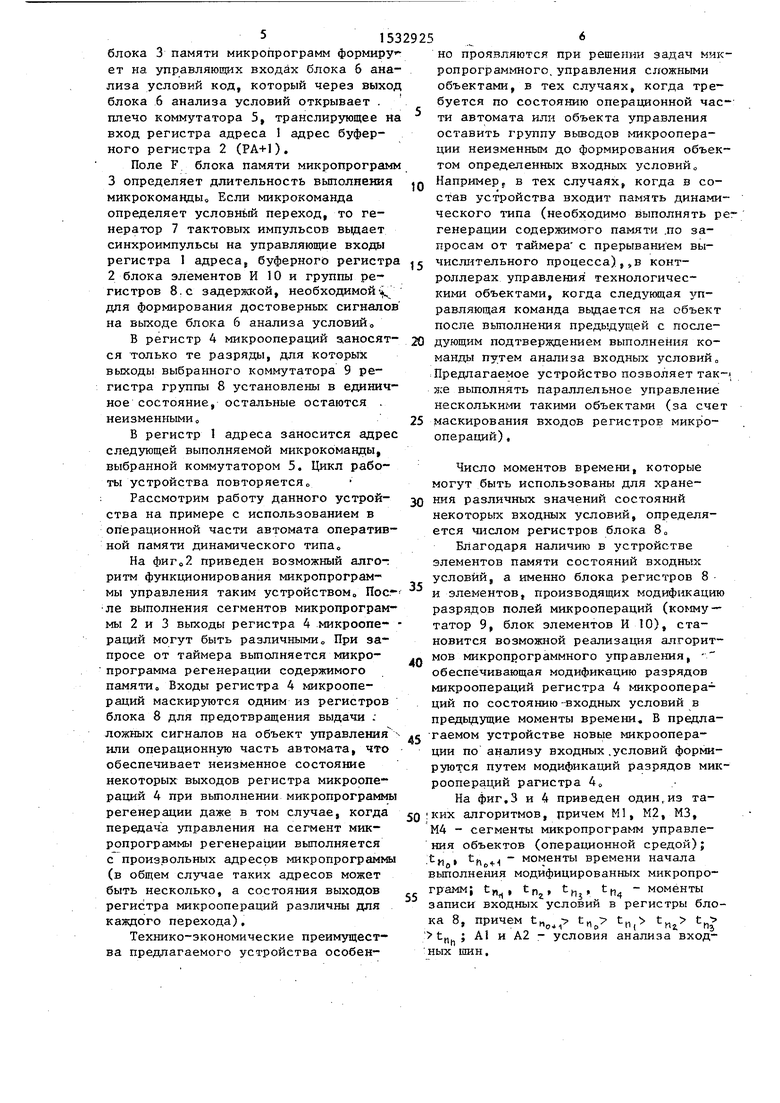
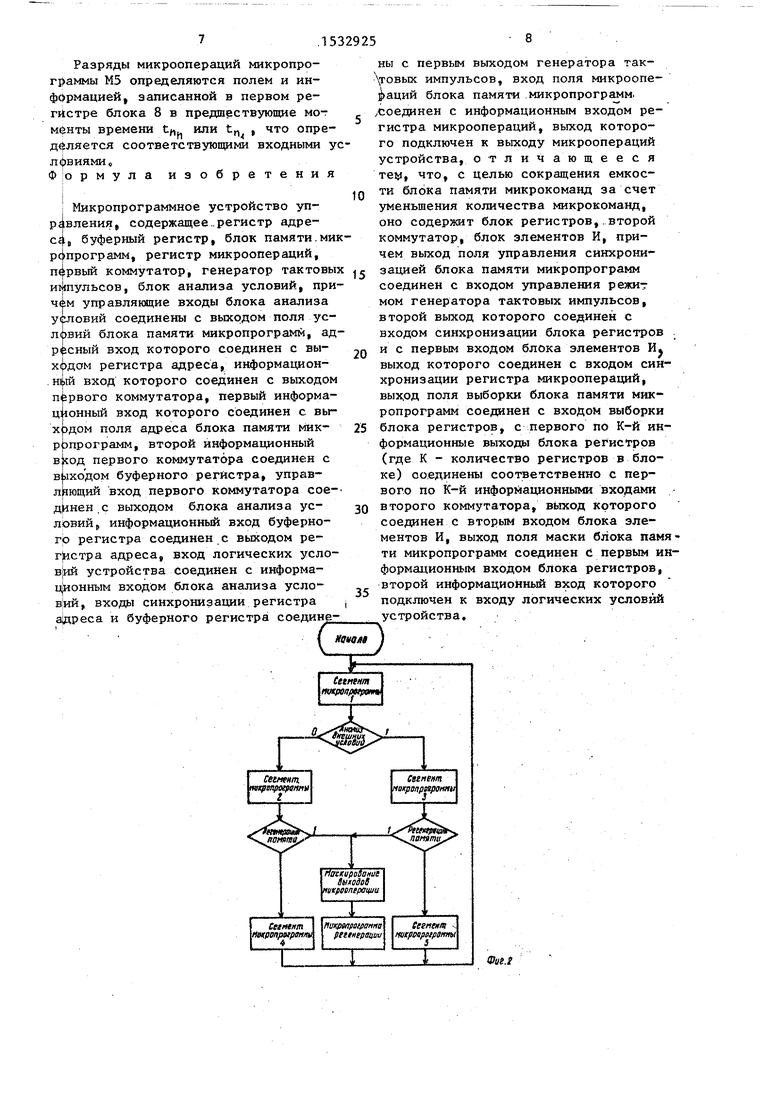
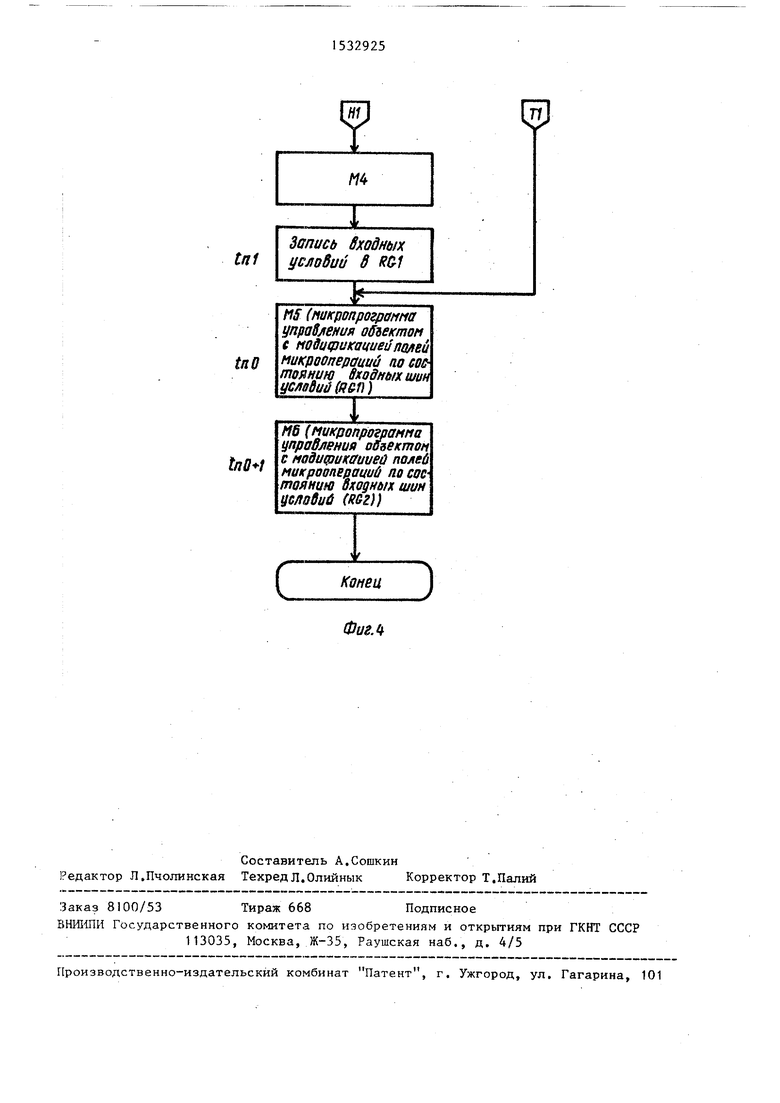
На фиг.1 приведена функциональная схема устройства: на фиг.2 - алгоритм выполнения микропрограмм уп- равления с циклической регенерацией содержимого динамической памяти управляемого объекта; на фиг.З и 4 - ал оритм работы устройства при записи входных условий в блок регистров.
Устройство содержит регистр 1 адреса, буферный регистр 2, блок 3 памяти микропрограмм, регистр 4 микроопераций, первый коммутатор 5, блок 6 анализа условий, генератор 7 тактовых -импульсов, блок 8 регистров, второй коммутатор 9, блок элементов И 10 вход 11 логических условий и выход 12 микроопераций устройства.
Устройство работает следующим об- разом.
В исходном состоянии по сигналу Сброс регистр 1 адреса устанавливается в нулевое состояние выходы блока регистров 8 устанавливаются в еди- ничное состояние. Производится выбор микрокоманды из блока 3 памяти микрокоманд. После микроопераций F подается на информационный вход регистра
микроопераций 4, поле К определяет выбор направления коммутатора 9, в результате осуществляется подключение выход одного регистра из блока регист- ров 8 по входам блока элементов И 10, поле К определяет регистры блока 8 (один или несколько), в которые заносится информационное поле маски М и (или) соответствующие состояния входа П.
Содержимое регистра 1 адреса переписывается в буферный регистр 2 и увеличивается на единицу
Если выбранная микрокоманда является микрокомандой с безусловным переходом, управляющее поле Y выхода блока 3 памяти микропрограмм формирует на управляющих входах блока 6 анализа условий код, который через выход блока 6 анализа условий открывает плечо коммутатора 5, транслирующее на вход регистра 1 адреса адресную часть А выхода блока памяти микропрограмм 3,
Если выбранная микрокоманда является микрокомандой с условным переходом, управляющее поле Y выхода блока 3 памяти микропрограмм формирует. на управляющих входах блока 6 анализа условий код, который, если выбранное условие с шины 11 входных условий выполняется через выход блока 6 анализа условий, открывает плечо коммутатора 5, транслирующее на вход регистра 1 адресную часть А выхода блока 3 памяти микропрограмм. В противном случае открывается плечо коммутатора 5, транслирующее на вход регистра 1 адрес буферного регистра 2 (РА+1).
Если выбранная микрокоманда не изменяет последовательную выборку микрокоманд, управляющее поле Y выхода
блока 3 памяти микропрограмм формирую ет на управляющих входах блока 6 анализа условий код, который через выход блока 6 анализа условий открывает . плечо коммутатора 5, транслирующее на вход регистра адреса 1 адрес буферного регистра 2 (РА+1).
Поле F блока памяти микропрограмм 3 определяет длительность выполнения микрокоманды,, Если микрокоманда определяет условный переход, то генератор 7 тактовых импульсов выдает синхроимпульсы на управляющие входы регистра 1 адресаt буферного регистра 2 блока элементов И 10 и группы регистров 8. с задержкой, необходимой для формирования достоверных сигналов на выходе блока 6 анализа условий„
В регистр 4 микроопераций заносятся только те разряды, для которых выходы выбранного коммутатора 9 регистра группы 8 установлены в единичное состояние, остальные остаются . неизменными„
В регистр 1 адреса заносится адрес следующей выполняемой микрокоманды, выбранной коммутатором 5. Цикл работы устройства повторяется о
Рассмотрим работу данного устройства на примере с использованием в операционной части автомата оперативной памяти динамического типа
На фиго2 приведен возможный алгот ритм функционирования микропрограммы управления таким устройством,, Пос- ле выполнения сегментов микропрограммы 2 и 3 выходы регистра 4 микроопе- раций могут быть различными„ При запросе от таймера выполняется микро- программа регенерации содержимого памяти Входы регистра 4 микроопераций маскируются одним из регистров блока 8 для предотвращения выдачи : ожных сигналов на объект управления N или операционную часть автомата, что обеспечивает неизменное состояние некоторых выходов регистра микроопераций 4 при выполнении микропрограммы регенерации даже в том случае, когда передача управления на сегмент микропрограммы регенерации выполняется с произвольных адресов микропрограммы (в общем случае таких адресов может быть несколько, а состояния выходов регистра микроопераций различны для каждого перехода).
Технико-экономические преимущества предлагаемого устройства особенно проявляются при решении задач микропрограммного, управления сложными объектами, в тех случаях, когда требуется по состоянию операционной части автомата или объекта управления оставить группу выводов микрооперации неизменным до формирования объектом определенных входных условий
Q Напримерf в тех случаях, когда з состав устройства входит память динамического типа (необходимо выполнять регенерации содержимого памяти .по запросам от таймера с прерыванием вы-
5 числительного процесса),,в контроллерах управления технологическими объектами, когда следующая управляющая команда выдается на объект после выполнения предыдущей с после0 дующим подтверждением выполнения команды путем анализа входных условий„ Предлагаемое устройство позволяет так же выполнять параллельное управление несколькими такими объектами (за счет
5 маскирования входов регистров микроопераций) ,
Число моментов времени, которые могут быть использованы для хране- 0 ния различных значений состояний
некоторых входных условий, определяется числом регистров блока 8„
Благодаря наличию в устройстве элементов памяти состояний входных условий, а именно блока регистров 8 и элементов, производящих модификацию разрядов полей микроопераций (коммутатор 9, блок элементов И 10), становится возможной реализация алгоритмов микропрограммного управления, обеспечивающая модификацию разрядов микроопераций регистра 4 микроопераций по состоянию --входных условий в предыдущие моменты времени, В предла- с гаемом устройстве новые микрооперации по анализу входных.условий формируются путем модификаций разрядов микроопераций рагистра 40
На фиг.З и 4 приведен одингиз та- 0 ких алгоритмов, причем Ml, M2, МЗ, М4 - сегменты микропрограмм управления объектов (операционной средой); си tft .и моменты времени начала выполнения модифицированных микропро5
0
грамм; tn , t.
.
n4
- моменты
записи входных условий в регистры бло,
причем th
. tM
A1 ин.
ч
V
С
и А2 - условия анализа входРазряды микроопераций микропрограммы М5 определяются полем и информацией, записанной в первом регистре блока 8 в предшествующие мо- монты времени ttt или tn , что опре- дйляется соответствующими входными ус- лфвиями, Формула изобретения
Микропрограммное устройство управления, содержащее регистр адреса, буферный регистр, блок памяти мик1
ны с первым выходом генератора так товых импульсов, вход поля микрооп раций блока памяти микропрограмм. хСоединен с информационным входом р гистра микроопераций, выход которо го подключен к выходу микроопераци устройства, отличающеес тем, что, с целью сокращения емкос ти блока памяти микрокоманд за сче уменьшения количества микрокоманд, оно содержит блок регистров, второ коммутатор, блок элементов И, причем выход поля управления синхрони
рс программ, регистр микроопераций,
первый коммутатор, генератор тактовых зацией блока памяти микропрограмм
импульсов, блок анализа условий, причем управляющие входы блока анализа условий соединены с выходом поля условий блока памяти микропрограмм, адресный вход которого соединен с вы- регистра адреса, информацион- Hipi вход которого соединен с выходом первого коммутатора, первый информационный вход которого соединен с выходом поля адреса блока памяти микропрограмм, второй информационный в|сод первого коммутатора соединен с выходом буферного регистра, управляющий вход первого коммутатора сое- дИнен с выходом блока анализа условий, информационный вход буферного регистра соединен с выходом ре- г|истра адреса, вход логических усло- устройства соединен с информационным входом блока анализа условий, входы синхронизации регистра , а дреса и буферного регистра соедине20
25
30
35
( чашна J
соединен с входом управления режит мом генератора тактовых импульсов, второй выход которого соединен с входом синхронизации блока регистр и с первым входом блока элементов выход которого соединен с входом с хронизации регистра микроопераций, выход поля выборки блока памяти ми ропрограмм соединен с входом выбор блока регистров, с первого по К-й формационные выходы блока регистро (где К - количество регистров в бл ке) соединены соответственно с пер вого по К-й информационными входам второго коммутатора, выход которог соединен с вторым входом блока эле ментов И, выход поля маски блока п ти микропрограмм соединен d первым формационным входом блока регистро второй информационный вход которог подключен к входу логических услов устройства.
ны с первым выходом генератора так- товых импульсов, вход поля микроопераций блока памяти микропрограмм. хСоединен с информационным входом регистра микроопераций, выход которого подключен к выходу микроопераций устройства, отличающееся тем, что, с целью сокращения емкости блока памяти микрокоманд за счет уменьшения количества микрокоманд, оно содержит блок регистров, второй коммутатор, блок элементов И, причем выход поля управления синхрони0
5
0
5
соединен с входом управления режит мом генератора тактовых импульсов, второй выход которого соединен с входом синхронизации блока регистров и с первым входом блока элементов И. выход которого соединен с входом синхронизации регистра микроопераций, выход поля выборки блока памяти микропрограмм соединен с входом выборки блока регистров, с первого по К-й информационные выходы блока регистров (где К - количество регистров в блоке) соединены соответственно с первого по К-й информационными входами второго коммутатора, выход которого соединен с вторым входом блока элементов И, выход поля маски блока памяти микропрограмм соединен d первым информационным входом блока регистров, второй информационный вход которого подключен к входу логических условий устройства.
С
Начало
ГлА
Запись дхвдных услобаи ВШ
ТяЗ
Запись входных ус/ю6и$ 6 ш
tnZ
Запись бхооных усладой 8RM
Фиг.З
M4
I
Запись входных услобии в RG-1
US (микропрограмма управления объектом с кодификацией ne/ieu микроопераций по состоянию Входных шин услодий (ffЈf))
L
Мб (микропрограмма управления ооъектон с модификацией полей микроопераций по сое таянию входных шин цслзвий (мг))
С
Конец
Фигл
1
L
опр я ац ац ход мг
)
| Микропрограммное устройство управления (его варианты) | 1983 |
|
SU1125625A1 |
| Микропрограммное устройство управления с контролем | 1985 |
|
SU1267414A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
