Oi
Јь
СО 1
So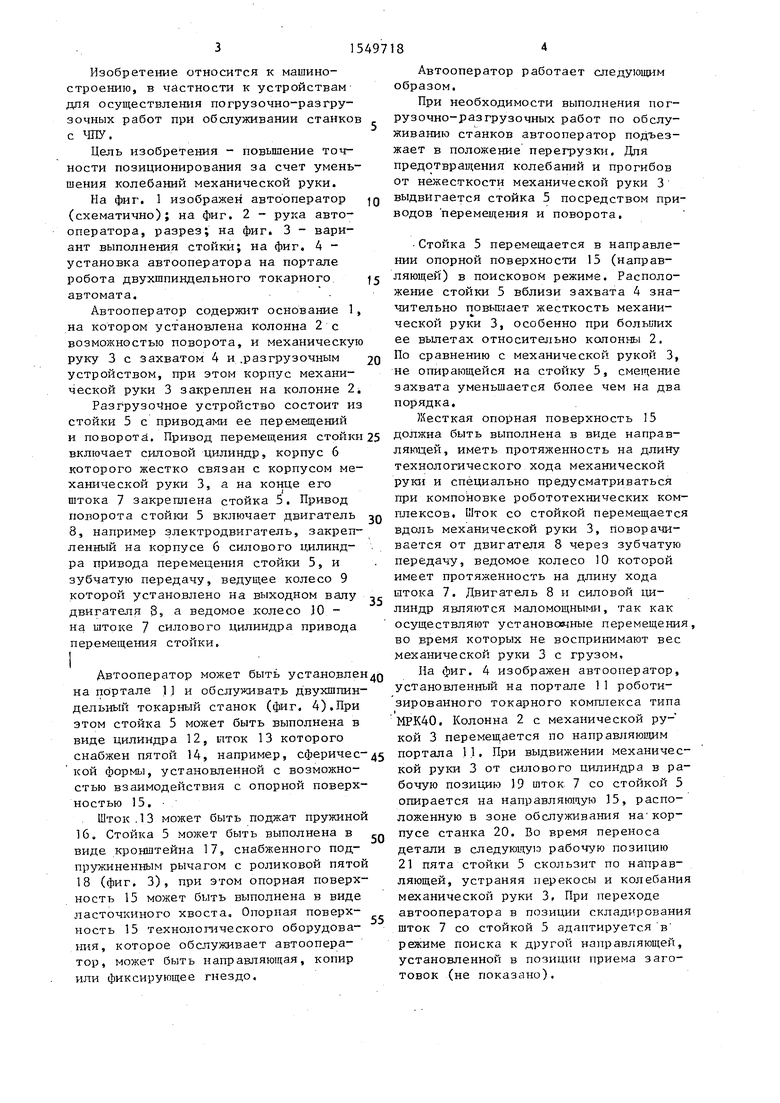
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU831513A1 |
| Автооператор | 1979 |
|
SU772808A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Многооперационный станок портального типа | 1989 |
|
SU1742029A1 |
| Автооператор | 1976 |
|
SU729028A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Токарный модуль | 1989 |
|
SU1660935A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Автооператор | 1974 |
|
SU554129A1 |
Изобретение относится к машиностроению, в частности к устройствам для осуществления погрузочно-разгрузочных работ при обслуживании станков с ЧПУ. Целью изобретения является - повышение точности позиционирования за счет уменьшения колебаний механической руки. Это достигается выполнением разгрузочного устройства в виде стойки 5 с приводами перемещений и поворота, причем размещение стойки 5 на конце штока 7 силового цилиндра привода перемещения стойки 5, а также связь штока 7 с двигателем 8 привода поворота стойки обеспечивают поиск опорной поверхности 15 и возможность взаимодействия с ней, что уменьшает колебания механической руки. 4 ил.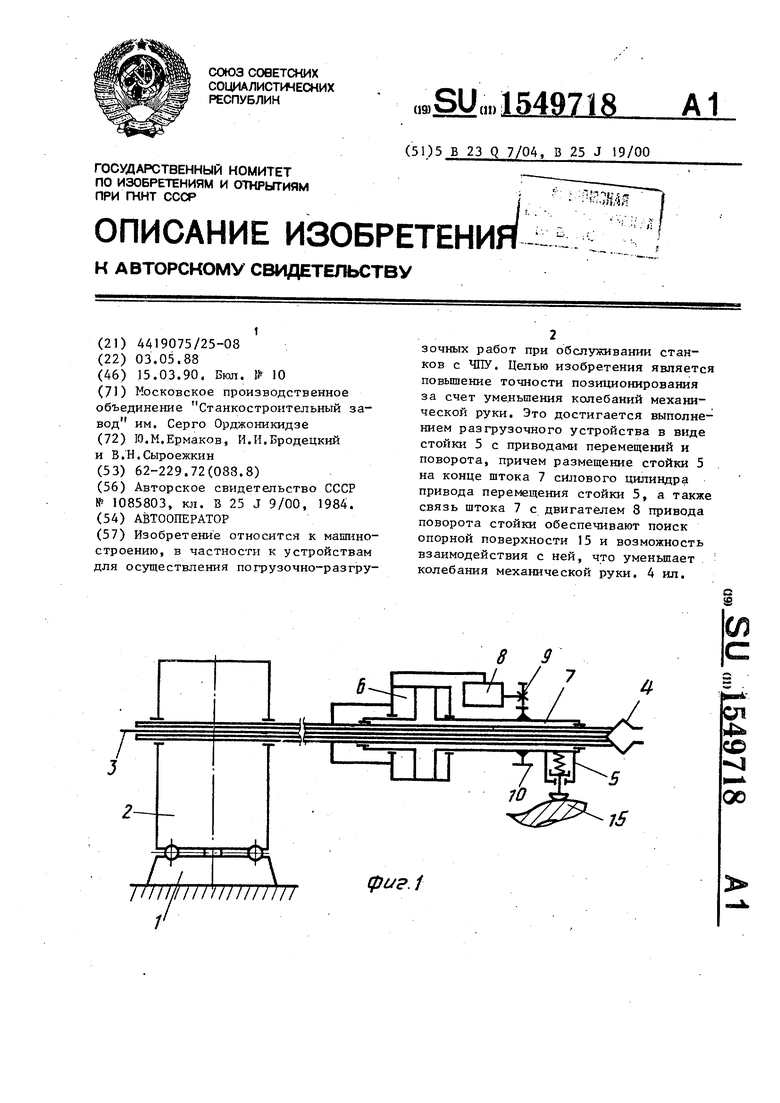
ГП11Ц11111П11 III
Изобретение относится к машиностроению, в частности к устройствам для осуществления погрузочно-разгру- зочных работ при обслуживании станков с ЧПУ.
Цель изобретения - повышение точности позиционирования за счет уменьшения колебаний механической руки.
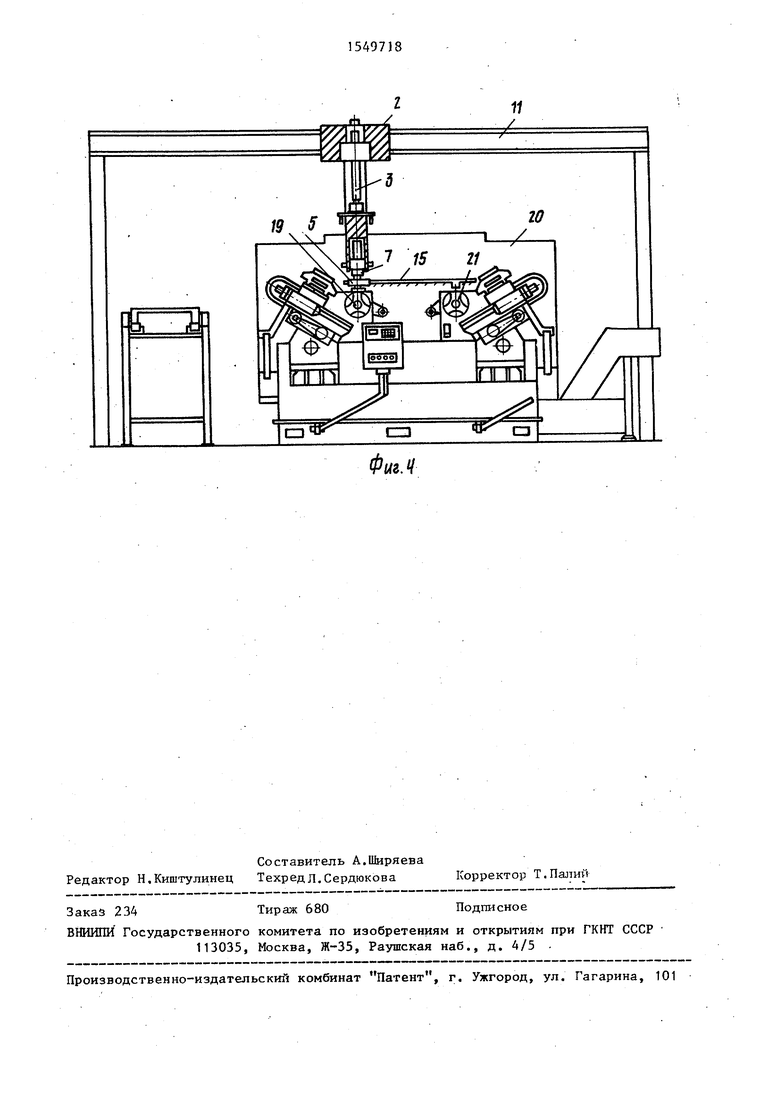
На фиг. 1 изображен автооператор (схематично); на фиг. 2 - рука автооператора, разрез; на фиг. 3 - вариант выполнения стойки; на фиг, 4 - установка автооператора на портале робота двухшпинделъного токарного автомата.
Автооператор содержит основание 1, на котором установлена колонна 2 с возможностью поворота, и механическую руку 3 с захватом 4 и .разгрузочным устройством, при этом корпус механической руки 3 закреплен на колонне 2,
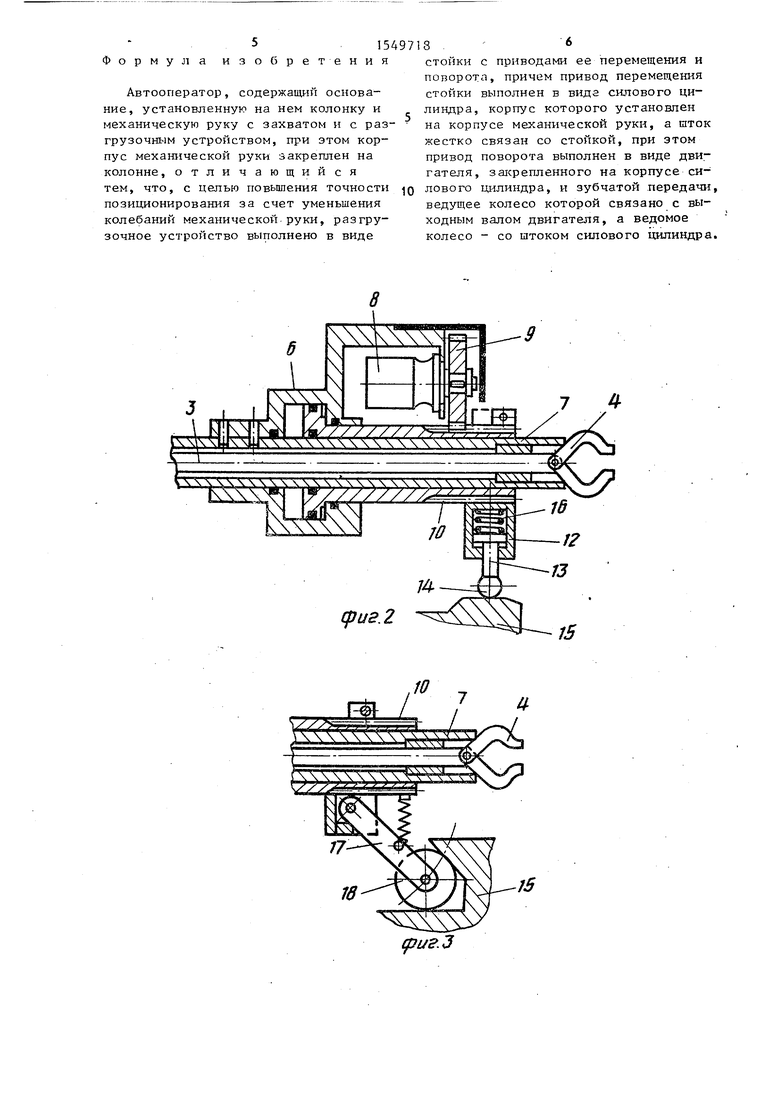
Разгрузочное устройство состоит из стойки 5 с приводами ее перемещений и поворота. Привод перемещения стойки включает силовой цилиндр, корпус б которого жестко связан с корпусом механической руки 3, а на конце его штока 7 закреплена стойка 5. Привод поворота стойки 5 включает двигатель 8, например электродвигатель, закрепленный на корпусе б силового цилиндра привода перемещения стойки 5, и зубчатую передачу, ведущее колесо 9 которой установлено на выходном валу двигателя 8, а ведомое колесо JO - на штоке 7 силового цилиндра привода перемещения стойки.
Двтооператор может быть установлен на портале 1 и обслуживать двухшпин- дельный токарный станок (фиг. 4).При этом стойка 5 может быть выполнена в виде цилиндра 12, иток 13 которого снабжен пятой 14, например, сферической формы, установленной с возможностью взаимодействия с опорной поверхностью 15.
Шток 13 может быть поджат пружиной
д 5
0
5 Q ,-
о з
0
5
Автооператор работает следующим образом.
При необходимости выполнения погруз очно- разгрузочных работ по обслуживанию станков автооператор подъезжает в положение перегрузки. Для предотвращения колебаний и прогибов от нежесткости механической руки 3 выдвигается стойка 5 посредством приводов перемещения и поворота.
Стойка 5 перемещается в направлении опорной поверхности 15 (направляющей) в поисковом режиме. Расположение стойки 5 вблизи захвата 4 значительно повышает жесткость механи-
ческой руки 3, особенно при больших ее вылетах относительно колонны 2. По сравнению с механической рукой 3, не опирающейся на стойку 5, смещение захвата уменьшается более чем на два порядка.
Жесткая опорная поверхность 15 должна быть выполнена в виде направляющей, иметь протяженность на длину технологического хода механической руки и специально предусматриваться при компоновке робототехнических комплексов, Шток со стойкой перемещается вдоль механической руки 3, поворачивается от двигателя 8 через зубчатую передачу, ведомое колесо 10 которой имеет протяженность на длину хода штока 7. Двигатель 8 и силовой цилиндр являются маломощными, так как осуществляют установочные перемещения, во время которых не воспринимают вес механической руки 3 с грузом.
На фиг. 4 изображен автооператор, установленный на портале 11 роботизированного токарного комплекса типа МРК40. Колонна 2 с механической рукой 3 перемещается по направляющим портала 11. При выдвижении механической руки 3 от силового цилиндра в рабочую позицию 19 шток 7 со стойкой 5 опирается на направляющую 15, расположенную в зоне обслуживания на корпусе станка 20. Во время переноса детали в следующую рабочую позицию 21 пята стойки 5 скользит по направляющей, устраняя перекосы и колебания механической руки 3, При переходе автооператора в позиции складирования шток 7 со стойкой 5 адаптируется в режиме поиска к другой направляющей, установленной в позиции приема заготовок (не показано).
Формул а
5154971
изобретения
Автооператор, содержащий основание, установленную на нем колонку и механическую руку с захватом и с разгрузочным устройством, при этом корпус механической руки закреплен на колонне, отличающийся тем, что, с целью повышения точности позиционирования за счет уменьшения колебаний механической руки, разгрузочное устройство выполнено в виде
фиг.2
хх. Xх S
« мЬииЬждт IL
ЦПТИЩ,- -д-г-М, ,„ ЦИЩНИИ JW
г
///.
36
стойки с приводами ее перемещения и поворота, причем привод перемещения стойки выполнен в вида силового цилиндра, корпус которого установлен на корпусе механической руки, а шток жестко связан со стойкой, при этом привод поворота выполнен в виде двигателя, закрепленного на корпусе силового цилиндра, и зубчатой передачи, ведущее колесо которой связано с выходным валом двигателя, а ведомое колесо - со штоком силового цилиндра.
,0
Ц(риг.З
ФмА
| Промышленный робот | 1982 |
|
SU1085803A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
