+
-f
+
т#«
%гся
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1987 |
|
SU1414635A1 |
| Захватное устройство манипулятора | 1990 |
|
SU1756146A1 |
| Захватное устройство | 1986 |
|
SU1351777A1 |
| Захват | 1982 |
|
SU1024270A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 1992 |
|
RU2041405C1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Захватное устройство | 1987 |
|
SU1414636A1 |
| Устройство для зажима полых деталей | 1982 |
|
SU1110598A1 |
| Манипулятор | 1985 |
|
SU1265041A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |

Изобретение относится к машиностроению и может быть использовано в робототехнологических комплексах для зажима и удержания объектов манипулирования. Цель изобретения - повышение надежности работы. Рабочая среда подается в полость силового цилиндра. Перед соприкосновением зажимной губки 3 с захватываемым объектом срабатывает датчик 6, рабочая среда подается в полость тормозного механизма, поршень, перемещаясь, фиксирует корпус силового цилиндра и открывает обратный клапан противодавления, выравнивая давление в штоковой и заштоковой полостях, одновременно рабочая среда подается в полость силового цилиндра 4, и зажимная губка 2, перемещаясь в направляющих корпуса 1, производит зажим захватываемого объекта. 3 ил.
д
я
+
+
4+
ЭТ
сл
00
sj
сл го
СО
Фиг
з153752
Изобретение относится к машиностроению и может быть использовано во всех отраслях народного хозяйства, где применяются робото-технологичес- кие комплексы.
Целью изобретения является повышение надежности работы.
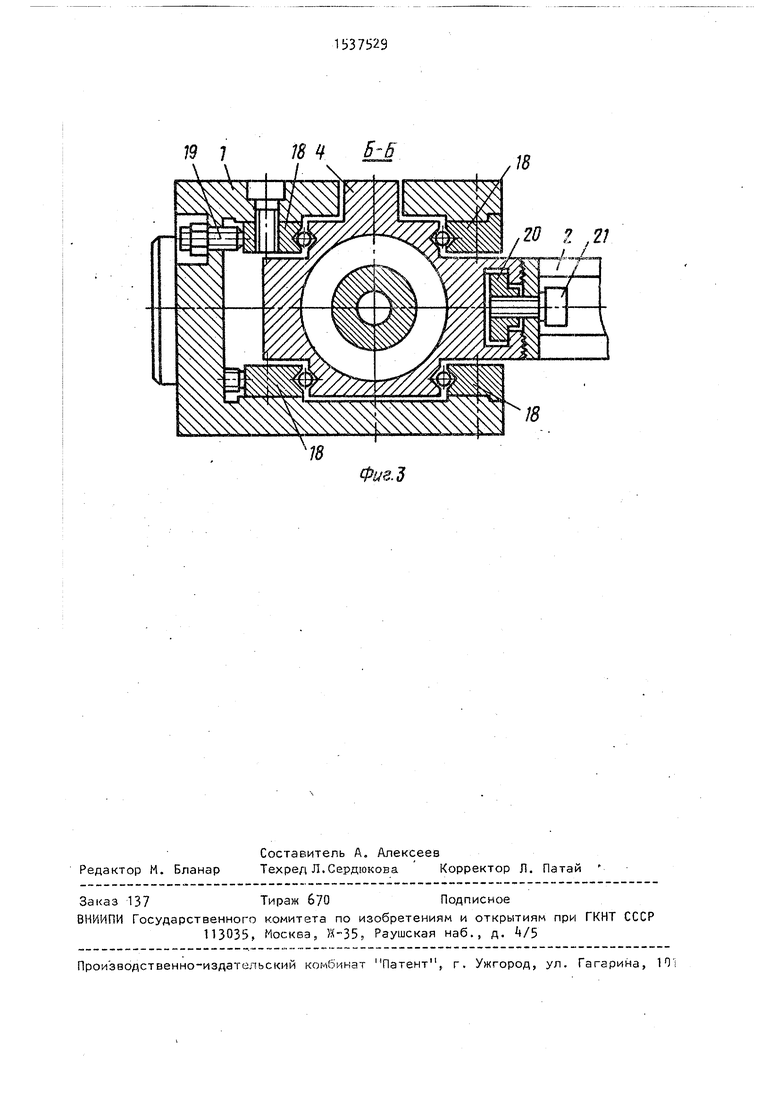
На фиг. 1 изображено захватное устройство, общий вид; на фиг. 2 - раз- 10 рез А-А на фиг. 1; на фиг, 3 - разрез Ь-Б на фиг. 1.
Захватное устройство содержит корпус 1, зажимные губки 2 и 3 с индивидуальными приводами, один из которых 15 выполнен в виде силового цилиндра -, а второй в виде позиционного модуля 5 линейного перемещения. На зажимной губке 3, закрепленной к позиционному
25
модулю 5 линейного перемещения, уста-2о Рольного положения, открывая обратный
клапан противодавления.
Второй клапан противодавления открывается под действием давления рабочей среды. Давление рабочей среды с обеих сторон шток-поршня 10 выравнивается, силовой цилиндр останавливается и фиксируется.
В то же время сигнал от датчика 6 поступает и в систему управления силовым цилиндром 4. Срабатывают соответствующие клапаны и одновременно с торможением силового цилиндра 9 позиционного модуля линейного перемещения рабочая среда поступает в полость силового цилиндра 4. Корпус силового цилиндра А с зажимной губкой 2 перемещается и закрепляет захватываемый объект.
Для раскрепления объекта манипулирования растормаживается ПМЛП 5, затем рабочая среда поступает в соответствующие полости силовых цилиндров k и 9, зажимные губки расходятся, освобождая закрепленный объект.
новлен датчик 6.
Шток-поршень 7 силового цилиндра Ц неподвижен и закреплен планкой 8. Позиционный модуль линейного перемещения (ПМЛП) 5 состоит из подвижного основного силового цилиндра 9 и неподвижного штока-поршня 10, закрепленного к корпусу 1 при помощи планок 8. В шток-поршень 10 встроен тормозной механизм, включающий поршень зо 11, самоустанавливающийся шгок 12, на конце которого закреплена тормозная планка 13 и обратные клапаны И противодавления. В целях технологичности шток-поршень 10 выполнен из двух 35 элементов. В шток-поршне 10 выполнено отверстие лод поршень 11 и расточено отверстие под установку сферического подшипника с закрепленным уплотнением 15 и профрезерован паз, позволяющий 40 штоку 12 отклоняться от нейтрального положения. В сквозном отверстии шток- поршня 10 при помощи втулок 16 и пружин 17 установлены обратные клапаны Т противодавления. После сборки тор-45 мозного механизма элементы шток-поршня 10 герметично соединяются.
В корпусе 1 установлены призмы 18 направляющих качения. Ответные призмы
Формула изобретения
Захватное устройство, содержащее корпус, в направляющих которого разменаправляющих выполнены на корпусе си-50щены зажимные губки, каждая из которых
левого цилиндра k и корпусе силовогоснабжена индивидуальным приводом, выцилиндра 9. В качестве тел качения ис-полненным в виде силового цилиндра,
пользованы шарики. Зазор в направляю-отличающееся тем что с
щих качения регулируется винтами 19.целью повышения надежности работы,
Зажимная губка 2 закреплена к корпусу 55оно снабжено дополнительным силовым
силового цилиндра k при помощи сухаряцилиндром, размещенным в поршне одно20 и винтов 21, также крепите другаяго из силовых цилиндров привода и связажимная губка к корпусу силового ци занным посредством системы управления
линдра 9.с датчиком, размещенным на зажимной
Захватное устройство работает следующим образом.
Первоначально рабочав среда подается в полость силового цилиндра 9 позиционного ПМЛП 5. Силовой цилиндр 9 с зажимной губкой 3 начинает перемещаться по стрелке. Перед соприкосновением зажимной губки 3 с захватываемым объектом с некоторым опережением срабатывает датчик 6, установленный на губке 3 сигнал от него поступает в систему управления, срабатывают соответствующие клапаны, рабочая среда поступает о полость тормозного механизма, поршень 11 перемещается, тормозная планка 13 упирается во внутреннюю поверхность силового цилиндра 9, шток 12 смещается из нейтФормула изобретения
Захватное устройство, содержащее корпус, в направляющих которого разме51 S3 7529б
губке, связанной с этим силовым ци- вода и дополнительно введенными об- линдром привода, при этом шток допол- ратными клапанами, размещенными в нительного цилиндра предназначен для взаимодействия с внутренней ловерхпоршне силового цилиндра привода и единяющими штоковую и заштоковую по
ностью корпуса силового цилиндра при//714 16 10
вода и дополнительно введенными об- ратными клапанами, размещенными в
поршне силового цилиндра привода и соединяющими штоковую и заштоковую полости этого силового цилиндра.
15 11
фиг. 2
19 1
/
18
Фив.д
| Схват манипулятора | 1978 |
|
SU716809A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| (УО ЗАХВАТНОЕ УСТРОЙСТВО | |||
