Изобретение относится к области Машиностроения, в частности к конструкции манипуляторов, и может быть использовано для автоматизации техно- логических процессов на предприятиях, например, при сборке.
Цель изобретения - упрощение конструкции
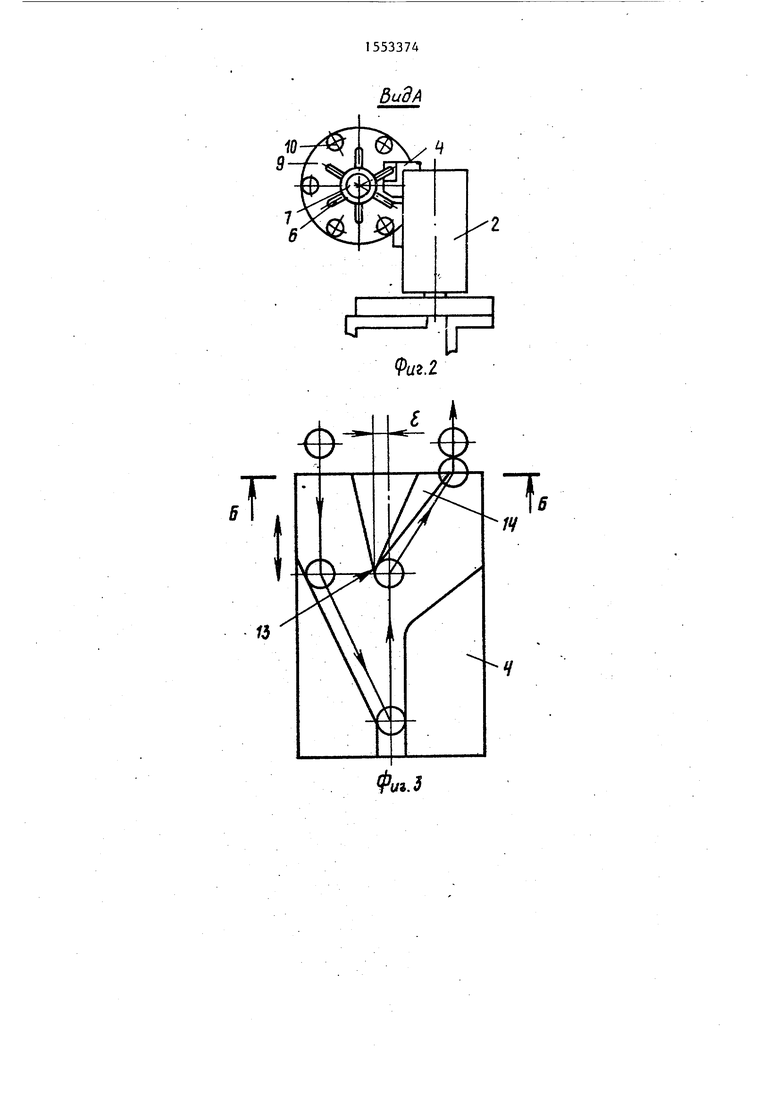
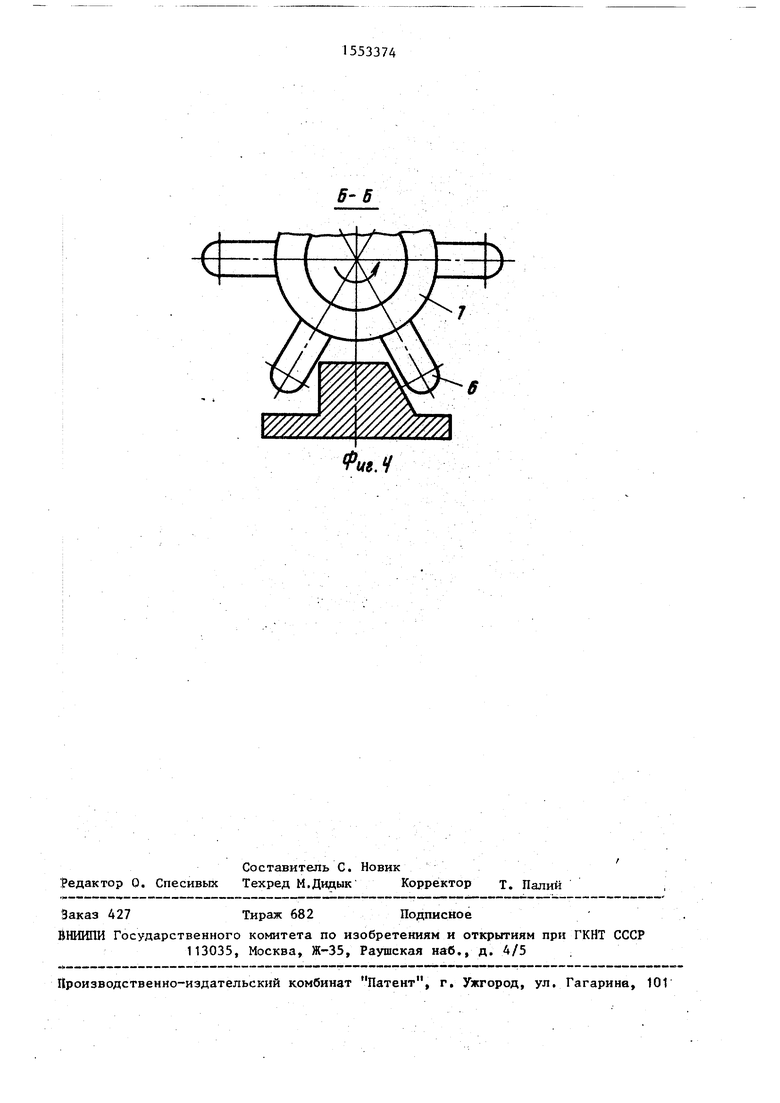
На фиг. 1 показан общий вид мани- йулятора; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - схема взаимодействия планки со звездочкой; на фиг. 4 - разрез Б-Б на фиг. 3.
1 Манипулятор содержит корпус 1, головку 2 с приводом возвратно-поступательного перемещения, например в :зиде пневмо цилиндр а (не показан), размещенные на головке 2 схват 3 и цланку 4 с разветвляющимся под уг- лом на два ручья пазом 5, с поверхностями которого взаимодействуют пальцы 6 звездочки 7, жестко закреплен- рой на конце трубы 8, которая в свою Очередь жестко связана с многоштыре- ым упором 9, имеющим горизонтально расположенные по окружности опорные |штыри 10. При этом труба 8 размещена На штанге 11 с возможностью вращения На ней.
Манипулятор с переменным ходом раотает следующим образом. , j В исходном положении при установке кассеты 12 с деталями схват 3 размещен над первым гнездом первого ряда . кассеты 12, с включением манипулятора схват 3 опустится у осуществит захват детали, поднимется с ней, в этот момент сработает привод головки 2, ко- торая переместится на позицию сборки, при этом один из пальцев 6 пройдет по верхнему ручью паза 5 планки 4 и под воздействием его повернет звездочку 7, трубу 8 и упор 9 на штанге И на половину шага между пальцами 6. На позиции сборки схват 3 установит деталь и освободится от нее, и головка 2 под воздействием привода начнет перемещаться в исходное положение, при этом тот же 6 переместится по нижнему ручью паза 5, причем пере- мещение пальца 6 именно по нижнему ручью п аза 5 произойдет из-за смещения вершин 13 выступа 14 на некоторое расстояние в сторону верхнего ручья
0
0 5
0
5
паза 5 по отношению осевой линии горизонтального участка -паза 5. При этом звездочка 7 и связанный с ней упор 9 повернется в том же направлении еще на полшага, напротив верхнего ручья разместится очередной палец 6 звездочки 7, а напротив головки 2 разместится штырь 10 упора 9, длина которого такова, что при опоре на не- го головки 2 .схват 3 разместится над вторым гнездом того же ряда кассеты 12. Далее процесс захвата детали схватом 3, перенос ее на позицию сборки и возврат головки 2 в исходное положение повторится с той разницей, что длина очередного опорного штыря 10 будет соответствовать размещению схвата над следующим гнездом кассеты 12. После последовательной выборки деталей из первого ряда гнезда кассеты 12 она передвигается на один шаг и в зону манипулятора вводится следующий ряд гнезд с деталями. Дальнейшая работа манипулятора осуществляется в указанном порядке.
На упоре 9 и звездочке 7 размещено равное количество опорных штырей 10 и пальцев 6, при этом расположение их по отношению друг к другу идентично ,
Предлагаемый манипулятор переменного хода конструктивно проще по сравнению с известными, обеспечивает точное и надежное позиционирование схвата.
Формула изобретения
Манипулятор, содержащий привод продольного перемещения головки со схватом, выполненный в виде силового цилиндра, многоштыревой револьверный упор и механизм его поворота, выполненный в виде копирного устройства, отличающийся тем, что, с целью упрощения конструкции, копир- ное устройство выполнено в виде звездочки и закрепленной на головке планки с пазом, разветвляющимся на два ручья с возможностью поочередного взаимодействия поверхностей ручьев с пальцами звездочки, причем последняя жестко закреплена на трубе, связанной с многоштырезым револьверным упором.
Ф/г.2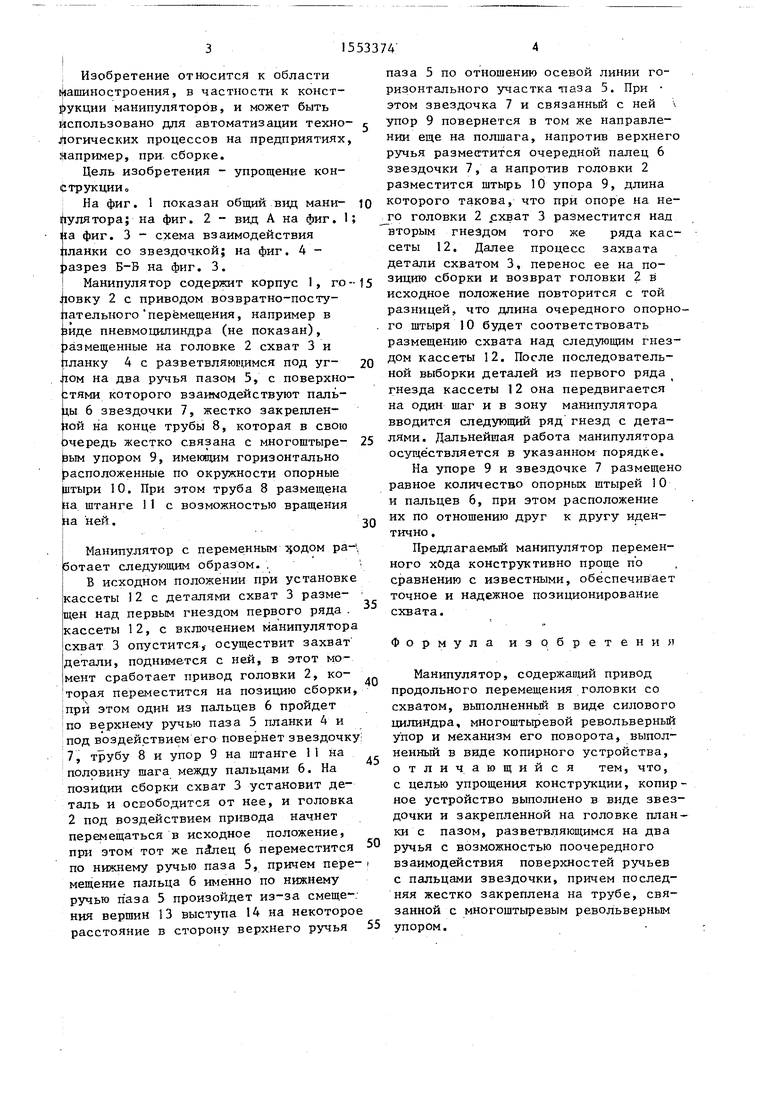
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство для изготовления петель | 1986 |
|
SU1444041A1 |
| Установка для нанесения покрытия на изделия | 1990 |
|
SU1776449A1 |
| Манипулятор | 1986 |
|
SU1400873A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Схват промышленного робота | 1985 |
|
SU1324846A1 |
| Револьверная головка | 1971 |
|
SU650724A1 |
| Манипулятор | 1982 |
|
SU1073086A1 |
| Промышленный робот | 1986 |
|
SU1335446A1 |
Изобретение относится к области машиностроения, в частности к конструкции манипуляторов, и может быть использовано для автоматизации технологических процессов на предприятиях, например, при сборке. Цель изобретения - упрощение конструкции. При перемещении головки 2 один из пальцев 6 звездочки копирного устройства проходит по верхнему ручью паза 5 планки 4 и под его воздействием поворачивает звездочку 7, трубу 8 и упор 9 на штанге 11 на половину шага между пальцами 6. При повторном перемещении головки 2 тот же палец 6 перемещается по нижнему ручью паза 5. При этом звездочка 7 и связанный с ней упор 9 поворачиваются в том же направлении еще на полшага, напротив верхнего ручья размещается очередной палец 6, а напротив головки 2 размещается штырь 10 упора 9, регулирующего ход головки 2. 4 ил.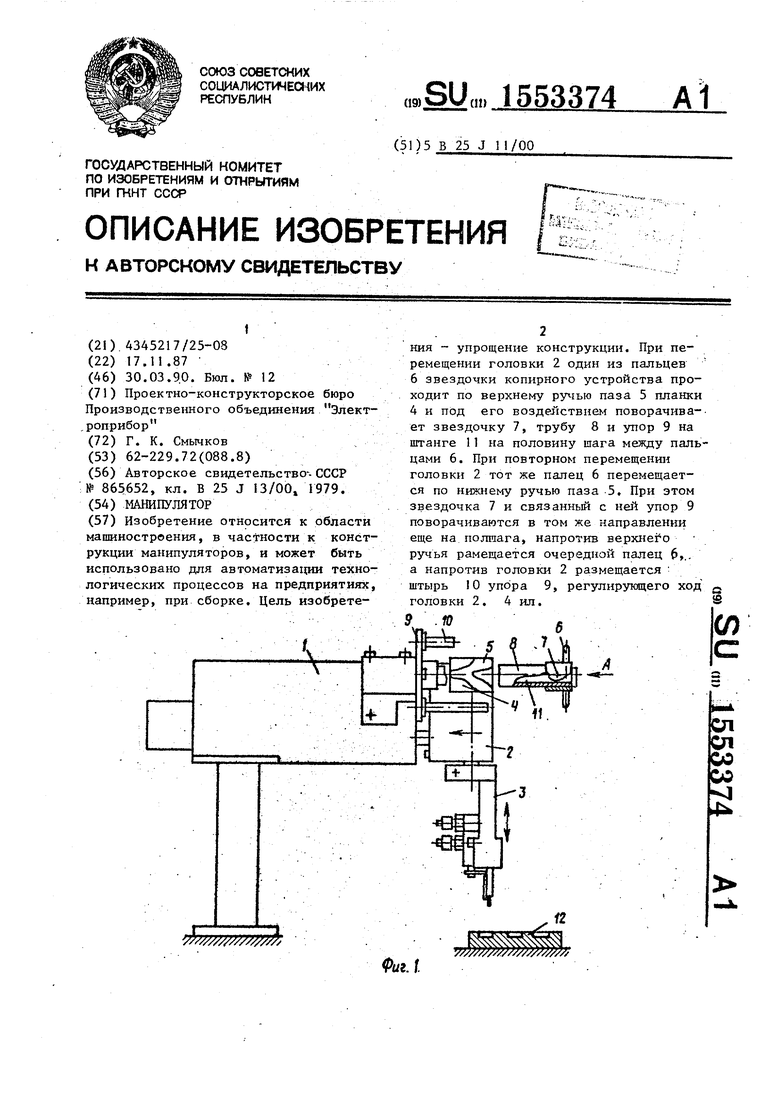
i,
Щ
tue.f
| Автооператор | 1979 |
|
SU865652A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
