Изобретение относится к термической обработке металлов и может быть использовано в станкостроении, автомобилестроении и других областях промышленности, связанных с восстановлением упругости пружин.
Целью изобретения является улучшение условий труда за счет автоматизации процесса загрузки и повышения технологических возможностей за счет увеличения ти- поразмера восстанавливаемых пружин.
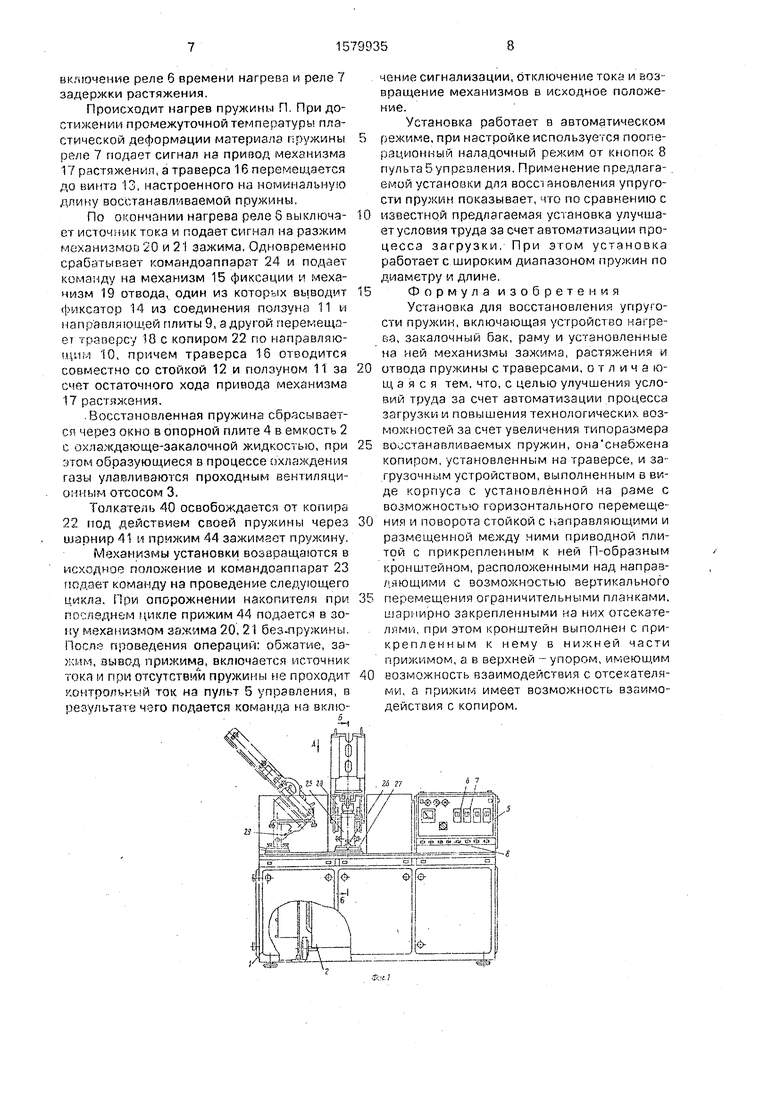
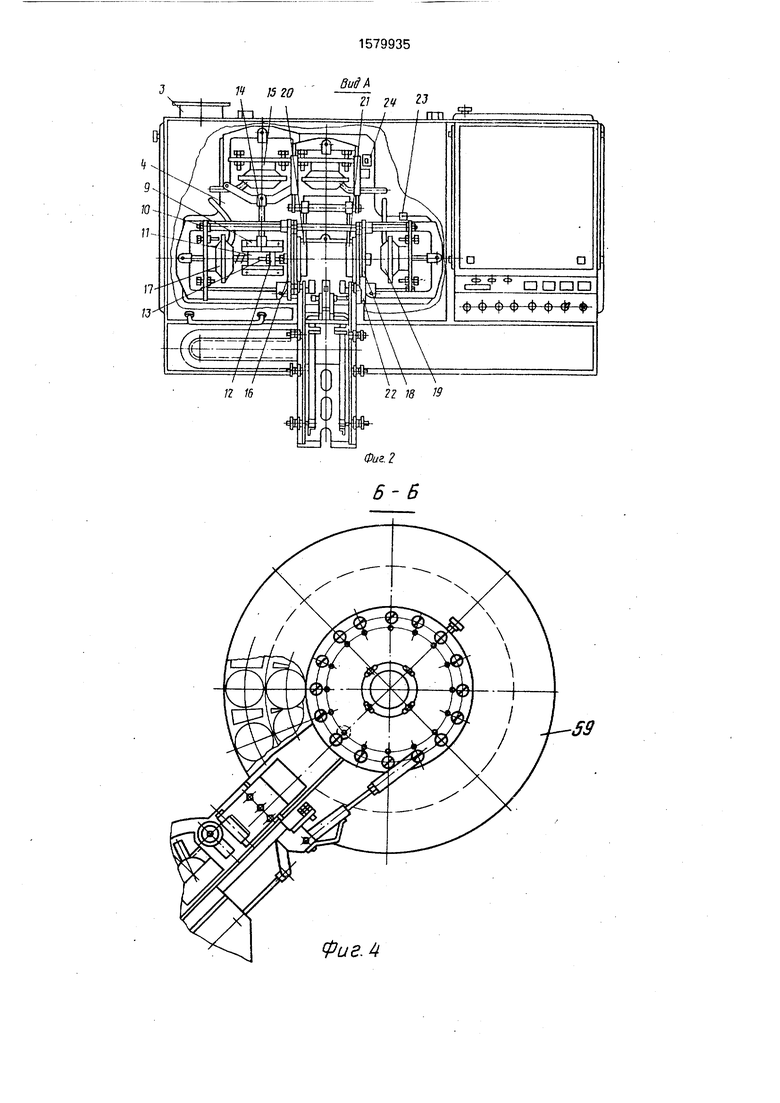
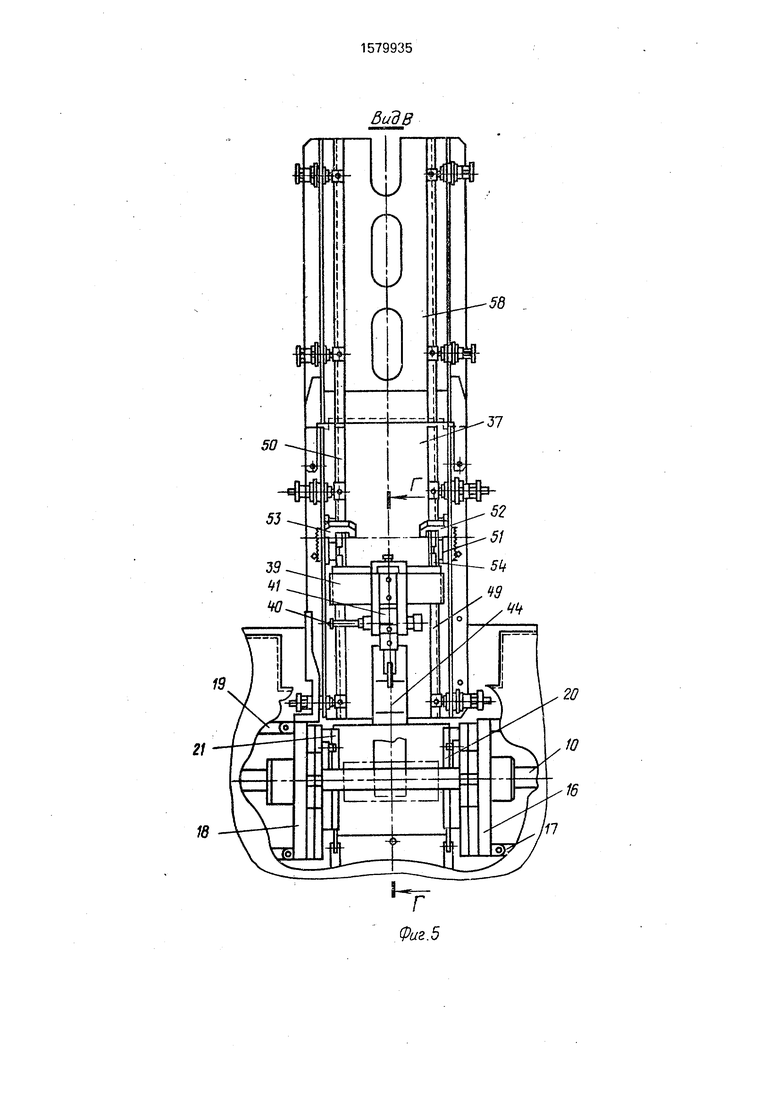
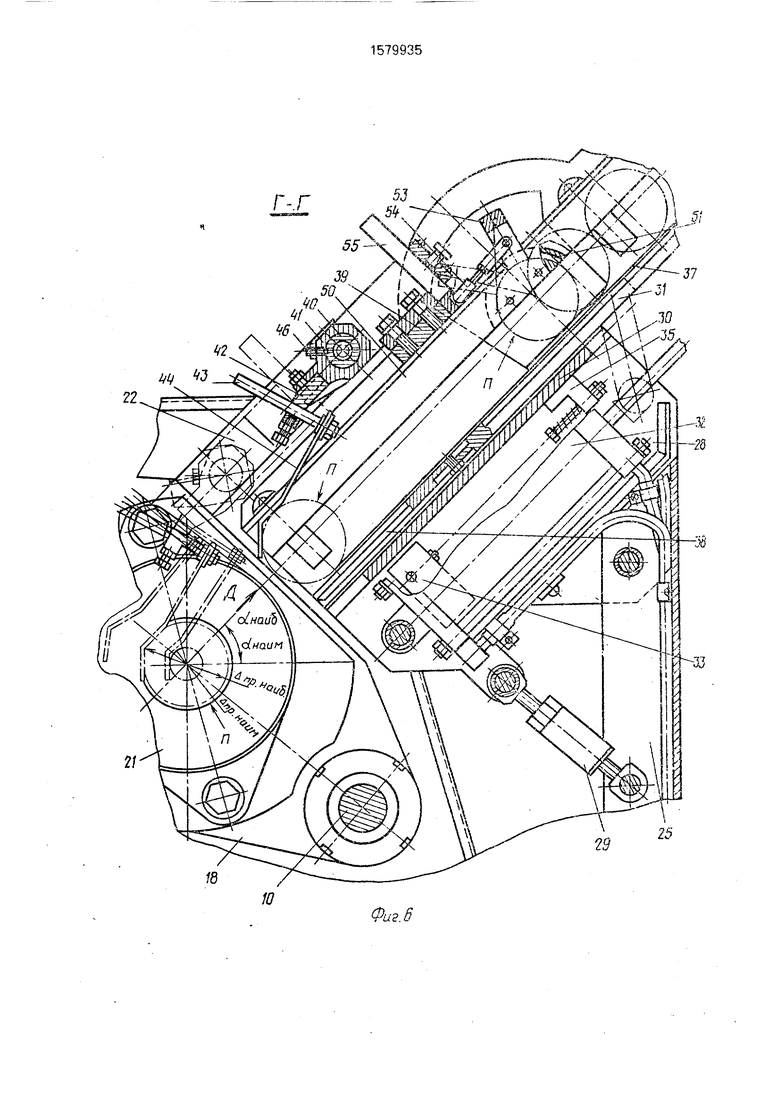
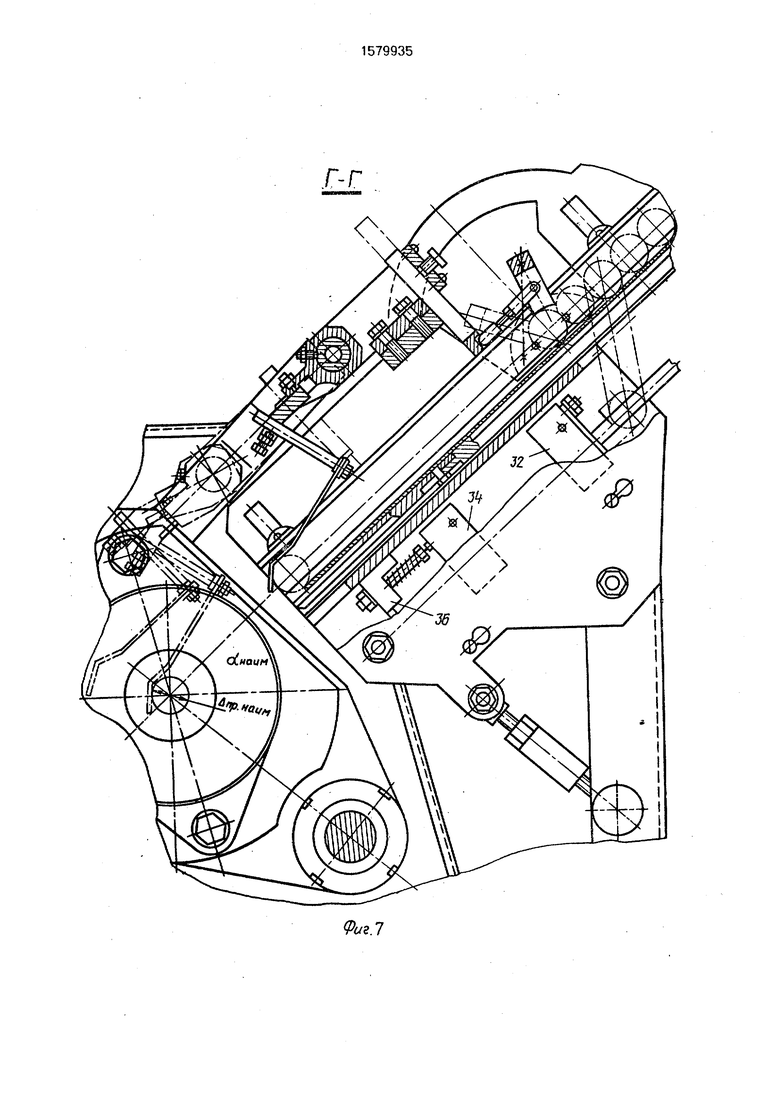
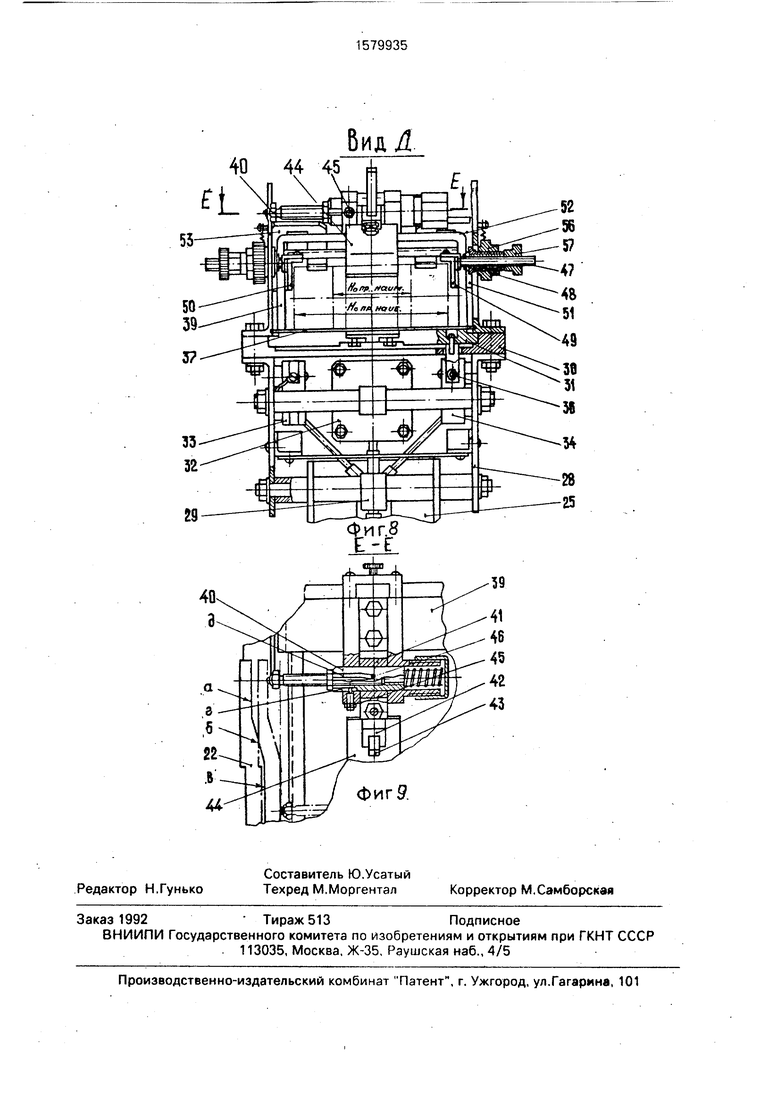
На фиг.1 изображена установка, общий вид; на фиг.2 - вид А на фиг.1 (положение Загрузка); на фиг.З - разрез Б-Б на фиг.1; на фиг. 4 -то же.вариант; на фиг. 5 - вид В на фиг.3;на фиг.6и7-разрезГ-Гнафиг.5;на фиг.8- вид Д на фиг.б; на фиг.9 - регулируемый толкатель, разрез Е-Е на фиг.8.
Установка для восстановления упругости пружин содержит раму 1, внутри которой находится емкость 2 с охлаждающе-закалочной жидкостью. На раме закреплены двухсторонний проходной отсос 3, опорная плита 4 и пульт 5 управления. Пульт 5 управления включает в себя реле 6 време- ни нагрева, реле 7 задержки растяжения, кнопки 8 управления.
На опорной плите 4 жестко закреплены направляющая плита 9 и горизонтальные цилиндрические направляющие 10. В на- правляющей плите 9 установлен подпружиненный ползун 11с закрепленной на нем стойкой 12 и регулирующим .винтом 13 настройки растяжения и фиксатор 14 механизма 15 фиксации.
На цилиндрических направляющих 10 установлены траверса 16 механизма 17 растяжения и траверса 18 механизма 19 отвода.
На траверсах 16 и 18 установлены меха- низмы 20 и 21 зажима пружины П с возможностью регулировки их соосности, а на траверсе 18 механизма 19 отвода закреплен копир 22 с двумя прямыми участками а, в и наклонным б между ними.
Для согласования действия механизмов на опорной плите 4 установлены командоаппараты 23 и 24.
В направляющем пазу передней части рамы 1 в зоне механизмов 20 и 21 установ- лена стойка 25 загрузочного устройства, которая ориентируется и фиксируется в
рабочем и отведенном с разворотом положениях фиксаторными штифтами 26 и планшайбой 27.
На стойке 25 в верхней части шарнирно установлен корпус 28 загрузочного устройства, у которого продольная ось подачи пру- жин совмещается с осевой линией механизмов 20 и 21 зажима в одной плоскости посредством тяги 29.
В корпусе 28 крепятся направляющие 30, в которых установлена плита 31, соединенная с приводом 32, размещенным в нижней части корпуса, там же размещены командоаппараты 33 и 34 крайних положений и подпружиненные упоры 35 и 36 подвижной плиты 31.
Плита 31 закрыта сверху неподвижным лотком 37, и в передней ее части крепятся сменная лапка 38 (по типоразмеру длины пружины П), а также скоба-кронштейн 39, в котором на подпружиненном толкателе 40 установлен шарнир 41 с держателем 42, имеющем регулируемый вылет, и в котором на квадратном штыре 43 закреплен смен - ный прижим 44 (по типоразмеру длины пружины П).
Толкатель 40 имеет регулируемую длину, а также осевой паз г для взаимодействия с фиксирующим винтом 45 скобы-кронштейна 39 и профильный паз д для взаимодействия с фиксирующим винтом 46 шарнира 41 и обеспечения открытия прижима 44 при осевом перемещении толкателя 40.
В верхней части корпуса 28 в поперечных пазах его бортов посредством регулировочных винтов 47 и резьбовых втулок 48 смонтированы ограничительные планки 49 и 50, на которых в шарнирно-секторных направляющих 51 установлены подпружиненные отсекатели 52 и 53 с регулируемыми рычагами 54, которые взаимодействуют с упором 55, установленном в направляющем пазу скобы-кронштейна 39, что позволяет производить перенастройку ограничительных планок 49 и 50 по диаметру восстанавливаемых пружин П с помощью фиксаторных гаек 56 с последующей подна- стройкой упора 55, а по длине пружин с помощью регулировочных гаек 57.
Корпус 28 в верхней части имеет проушины для подсоединения к нему накопителей пружин типа лоткового 58 (фиг.З), барабанного 59 (фиг.4) или другого типа.
Установка работает следующим образом.
Производится настройка механизмов
20и 21 зажима , растяжения 17 и отвода 19 на данный тип пружин П.
Для удобства настройки стойка 25 загрузочного устройства может быть отведена из рабочего положения в сторону с разворотом по направляющему пазу рамы 1 и после окончания настройки возвращена в рабочее положение с ориентировкой и фиксацией фиксаторными штифтами 26 и планшайбой 27.
Исходное положение загрузочного устройства: сменная лапка 38 и прижим 44, соответствующие данному типоразмеру пружин П, втянуты, прижим 44 с помощью держателя 42 и штыря 43 настроен на данную пружину П.
Ограничительные планки 49 и 50, образующие пропускной канал, настраиваются посредством регулировочных винтов 47 и резьбовых втулок 43 с помощью фиксатор- ных гаек 56 по диаметру пружин с последующей поднастройкой положения упора 55 рычагов 54 отсекателей 52 и 53 и с помощью регулировочных гаек 57 по длине пружин.
Продольная ось пропускного канала корпуса 28 и осевая линия механизмов 20 и
21зажима совмещаются в одной плоскости регулировкой длины тяги 29,
Регулируемый толкатель 40 через шарнир 41 при операции Обжатие торцов пружины П механизмами 20 .и 21 зажима, закрепленных на траверсах 16 и 18 механизмов 17 и 19 растяжения и отвода, поджимается прямым участком а копира 22 траверсы 18 на величину, обеспечивающую приоткрытие прижима 44 для свободного входа пружины П между этим прижимом и лапкой 38.
Производится загрузка пружинами П загрузочного устройства, при этом для избежания холостого хода первая пружина закладывается между лапкой 38 и прижимом 44 и затем заполняется накопитель. При использовании лоткового накопителя 58 (фиг.З) заполнение происходит прямо на установке с возможностью подзагрузки во время работы.
При использовании барабанного накопителя 59 (фиг.4) заполнение может производиться как на установке, так и отдельно, при этом для избежания холостого хода необходимо досылать пружину из барабана к отсекателям 52 и 53.
Установка готова к работе, траверсы 16 и 18 механизмов 17 и 19 растяжения и отвода разведены, толкатель 40 освобожден от копира 22 и пружина П зажата прижимом 44. С пульта 5 управления подается команда на процесс.
5Привод 32 загрузочного устройства перемещает по направляющим 30 корпуса 28 закрытую сверху лотком 37 плиту 31 с закрепленной на ней скобой-кронштейном 39. Пружина П, зажатая между лапкой 38 и при0 жимом 44, подается в зону механизмов 20 и 21 зажима.
Одновременно рычаги 54 отсекателей 52 и 53 освобождаются от упора 55 и отсе5 катели по шарнирным-секторным направляющим 51 под действием своих пружин переходят в нижнее положение и пропускают пружины вниз до упора первой из них в передние кромки отсекателей 52 и 53. В
0 конце хода привода 32 подпружиненный упор 35 плиты 31 взаимодействует с коман- доаппаратом 33, который подает команду на обжатие торцов пружины П механизмами 20 и 21 зажима, закрепленными на траверсах
5 16 и 18 механизмов 17 и 19 растяжения и отвода. В конце хода траверсы 18 механизма 19 отвода прямой участок в копира 22 взаимодействует с толкателем 40, который, взаимодействуя своим осевым пазом г с
0 фиксирующим винтом 45 скобы-кронштейна 39, совершает осевое перемещение, при этом взаимодействуя своим профильным пазом Ъ с фиксирующим винтом шарнира 41, на котором через держатель 42 и штырь
5 43 закреплен прижим 44. Происходит поворот шарнира 41 и открытие прижима 44. Пружина П удерживается торцами механизмов 20 и 21 зажима. Срабатывает командо- аппарат 23 и подается команда на зажим
0 пружины механизмами 20 и 21 зажима В конце зажима командоаппарат 24 дает команду на привод 32.
Плита 31 возвращается в исходное положение. При этом толкатель 40 перемеща5 ется по копиру 22, на прямом участке в, открытый прижим 44 проходит над пружиной, на наклонном участке б прижим начинает закрываться и на прямом участке а прижим остается немного приоткрытым для
0 приема следующей пружины П, которая подается от отсекателей 52 и 53 при их переводе в верхнее положение под действием упора 55 и рычагов 54, при этом отсекатели 52 и 53 шарнирно обходят пружину и осво5 бождают ее от запирающих передних кромок, одновременно задние кромки запирают следующую пружину. В конце хода под действием подпружиненного упора 36 срабатывает командоаппарат 34 и дается команда на подачу технологического тока.
включение реле 6 времени нагрева и реле 7 задержки растяжения.
Происходит нагрев пружины П При достижении промежуточной температуру пластической деформации материала пружины реле 7 подает сигнал на привод механизма 17 растяжения, а траверса 16 перемещается до ниша 3, настроенного на номинальную длину восстанавливаемой пружины,
По окончании нагрева реле 6 выключз- ет источ (ик тока и подает сигнал на разжим механизмов 20 и 21 зажима, Одновременно срабнтырйет командоаппарат 24 и подает команду на механизм 15 фиксации и механизм 19 отвода, один из которых выводит фиксатор 14 из соединения ползуна 11 и направляющей плиты 9, а другой перемещает фяверсу 18 с копиром 22 по направляющие 10, причем траверса 16 отводится совместно со стойкой 12 и ползуном 11 за счет остаточного хода привода механизма 17 раояжения.
Восстановленная пружина сбрасывается через окно в опорной плите 4 в емкость 2 с охлаждающе-закалочной жидкостью, при отом образующиеся в процессе охлаждения газы улавливаются проходным вентиляционным отсосом 3,
Толкатель 40 освобождается от копира 22 под действием своей пружины через шарнир 41 и прижим 44 зажимает пружину.
Механизмы установки возвращаются в исходное положение и командоаппарат 23 подает команду на проведение следующего цикла. При опорожнении накопителя при по- леднем цикле прижим 44 подается в зону механизмом зажима 20, 21 без-пружины Послг проведения операции: обжатие, за- пм, вывод прижима, включается источник «ока и при отсутствии пружины не проходит контрольный гок на пульт 5 управления, в репульташ чего подается команда на вклю5
чение сигнализации, отключение тока и аоз вращение механизмов в исходное положение.
Остановка работает в автоматическом режиме, при настройке используе гея пооперационный наладочный режим от кнопок 8 пульта5 управления. Применение предлагаемой установки для восстановления упругости пружин показывает, го по сравнению с известной предлагаемая установка улучшает условия труда за счет автоматизации процесса загрузки, При этом установка работаете широким диапазоном пружин по диаметру и длине.
Формула изобретения Установка для восстановления упругости пружин, включающая устройство нагре- м, закалочный бак, раму и установленные на ней механизмы зажима, растяжения и отвода пружины с траверсами, отличающаяся тем, что, с целью улучшения условий труда за счет автоматизации процесса загрузки и повышения технологических возможностей за счет увеличения типоразмера восстанавливаемых пружин, она снабхчена копиром, установленным на траверсе, и за грузочным устройством, выполненным в виде корпуса с установленной на раме с возможностью горизонтального перемещения и поворота стойкой с направляющими и размещенной между ними приводной плитой с прикрепленным к ней П-образным кронштейном, расположенными над направляющими с возможностью вертикального перемещения ограничительными планками, шарнирно закрепленными .на них отсека гелями при этом кронштейн выполнен с при- крепленным к нему в нижней части прижимом, а в верхней - упором, имеющим возможность взаимодействия с отсекателч- мк, а прижим имеет возможность взаимодействия с копиром.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для восстановления упругости пружин | 1986 |
|
SU1502633A2 |
| Установка для восстановления упругости пружин | 1977 |
|
SU740842A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Устройство для стапелирования плоских деталей | 1988 |
|
SU1593752A1 |
| Устройство для сборки контактных групп | 1981 |
|
SU991629A1 |
| Станок для фрезерования мест сопряжений деревянных деталей | 1984 |
|
SU1219350A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Многошпиндельный двусторонний автомат для нарезания резьбы метчиками | 1985 |
|
SU1315178A1 |
| Полуавтоматический станок для совместной обработки грифа и корпуса музыкальных инструментов | 1986 |
|
SU1339016A1 |
| Устройство для передачи изделий | 1982 |
|
SU1093486A1 |
Изобретение относится к устройствам для восстановления упругости пружин. Цель изобретения - улучшение условий труда за счет автоматизации процесса загрузки и повышение технологических возможностей за счет увеличения типоразмера восстанавливаемых пружин. Сущность изобретения: установка снабжена копиром, установленным на траверсе, и загрузочным устрйоством, выполненным в виде корпуса с установленной на раме с возможностью горизонтального перемещения и поворота стойкой с направляющими и размещенной между ними приводной плитой с прикрепленным к ней П-образным кронштейном, расположенным над направляющими с возможностью вертикального перемещения ограничительными планками, шарнирно закрепленными на них отсекателями, при этом кронштейн выполнен с прикрепленным к нему, в нижней части прижимом, а в верхней - упором, имеющим возможность взаимодействия с отсекателями, а прижим имеет возможность взаимодействия с копиром. 3 ил.
о 7
ер
v гч н .
II ГГП . 4
59
ворд
9С66Ш
1Ч
CD
J-J
9C66I91
40 44 45
Вид Л
фиг 9.
| Установка для восстановления упругости пружин | 1983 |
|
SU1154348A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Установка для восстановления упругости пружин | 1986 |
|
SU1502633A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
