Изобретение относится к станкостроению и является дополнительным к основному авт.св. № 1488179.
Цель изобретения - повыгаение нд- дежности работы роторного автомата питания, достигаемое за счет надежного позиционирования вращающихся элементов ротора.
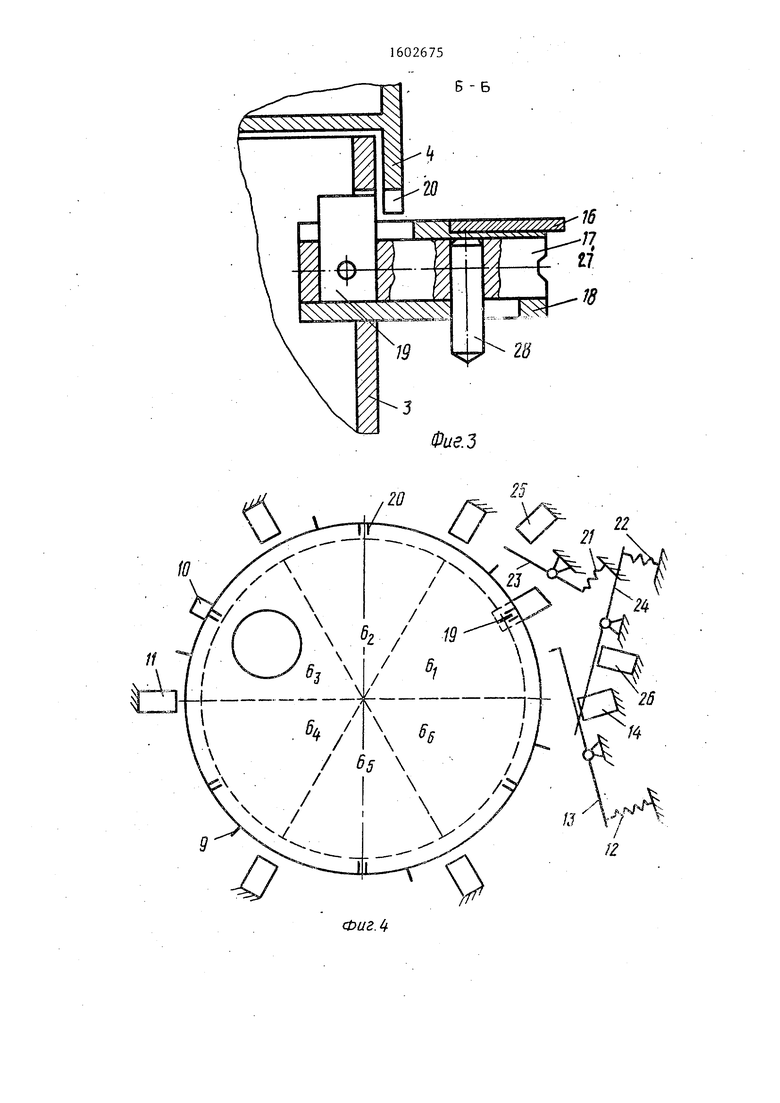
На фиг.1 показан роторный автомат питания, общий вид; на фиг«2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг,2| на фиг.4-8 - положения пред- бункера при работе роторного автомата в режиме подпитки.
Роторный автомат питания содержит смонтированный на основании 1 приходной вал 2, закрепленный на валу диск 3 к бункер 4, концентрично установленный на диске 3 с возможностью относктельного вращения. Емкост диска 3 равномерно разделена перегородками 5 на секции 6j в каждой из которьп-: расположен по крайней мере один накопитель 7„ В бункере 4 выполнено разгрузочное окно 8, перекры- ваемое одной из секций 6. На наруж- ной поверхности бункера 4 равномерно по окружности закреплены упоры 9, количество . которых равно количеству секций 6j и пластина 10j сориентированная по линии центров вала 2 и окна 8, Вокруг бункера 4 на основании 1 равномерно по окружности установлены датчики 115 имеющие возможность взаимодействия с пластиной 0, Число датчиков М выбрано по числу соответствующих им секций 6 диска 3 На основании 1 установлен подпружиненный пр -жиной 12 качающийся рычаг 13,, управляемый электромагнитом 14.
0
5
0
5
5
0
5
Рычаг 13 имеет возможность взаимодействовать Г-образным концом I5 с упорами 9, На диске 3 закреплен кулачок 15, предназначенный для разъединения рычага 3 с упором. Диск 3 снабжен дополнительным фиксатором бункера 4 (фиг.З) и механизмом его управления. Дополнительный фиксатор выполнен в виде ползуна 17, установленного с возможностью радиального перемещения в направляющих 18, закрепленных на кулачке 16. Фиксатор снабжен выступом 195 предназначенным для взаимодействия с прорезями 20J равномерно расположенными по окружности в донной части бункера 4. Прорези 20 выполнены по числу упоров 9. Механизм управления фиксатором выполнен в виде двух подпружиненных пружинами 21 и 22 поворотных копиров 23, 24, управляемых соответственно электромагнитами 25, 26. Электромагниты 25 и 26 связаны с датчиками 11 . Копир 23 установлен за зоной действия качающегося рычага 1 3 с возможностью взаимодействия с торцом 27 ползуна 17 и обеспечивает вывод его выступа 19 из прорезей 20„ Копир 24 установлен в зоне действия рычага 13 с возможностью взаимодействия с пальцем 28, за- крепленным на ползуне 17, и обеспечивает ввод.его выступа 19 в прорези 20. На копире 24 установлен концевой выключатель 29, связанный с системой управления ротором и взаимодействующий с пальцем 28 ползуна 17.
Роторный автомат работает следующим образом.
После загрузки в каждую секцию 6 деталей приводится во вращение вал и диск 3 с бункером 4, В процессе работы роторного автомата в нормальном .режиме электромагниты 14, 25 и 2 находятся во включенном состоянии и преодолевая усилия пружин 12, 21 и 22, удерживают рычаг 13 и копиры 23 24.в крайних отведенных положениях, в которых они не взаимодейств тот с упорами 9 и ползуном 17. Выступ 19 ползуна 17 введен в одну из прорезей 20 и соединяет тем самым бункер 4 с диском 3. Расположенные в секциях детали поступают в соответствующие накопители 7, а оттуда - в другие технологические механизмы.
Работу ротора в режиме подпитки рассмотрим на примере загрузки второй секции 6. При этом считаем, что разгрузочное окно 8 бункера 4 размещено в третьей секции 6, а выступ 19 ползуна 17 - в первой прорези 20. При выработке деталей во второй секции 6 до определенного объема датчик уровня (не показан) подает сигнал в систему управления о необходимости подпитки этой секции. В ЭТО время пластина 10 может быть расположена , например, между третьим и четвертым датчиками 11 ((}иг.4). После поступления Б систему сигнала отключается электромагнит 25, а затем с задержкой по времени на величину, равную времени одного оборота вала 2, включается второй датчик 11 и отключается электромагнит 14, При отключении электромагнита 25 копир 23 под действием пружины 21 перемещается из крайнего отведенного в ра- , бочее положение и в процессе одного оборота воздействует на торец 27 ползуна 17. Под действием копира 23 ползун 17 перемещается в направляющих 18, а его выступ 19 выходит из прорези 20, что обеспечивает расфиксирова- ние диска 3 и бункера 4.
Расфиксированный бункер 4 за счет сил трения удерживается на диске 3 и продолжает совершать совместное с ним вращение до окончания полного оборота вала 2, Таким образом, в конце первого оборота ротора совмещенное с третьей секцией 6 разгрузочное окно 8 вновь возвращается в первоначальное положение, а выступ 19 ползуна 17 выдвигается из прорези 20. Затем одно- пременко отключается электромагнит 14 и включается второй датчик 11.
2 6
1602675
20
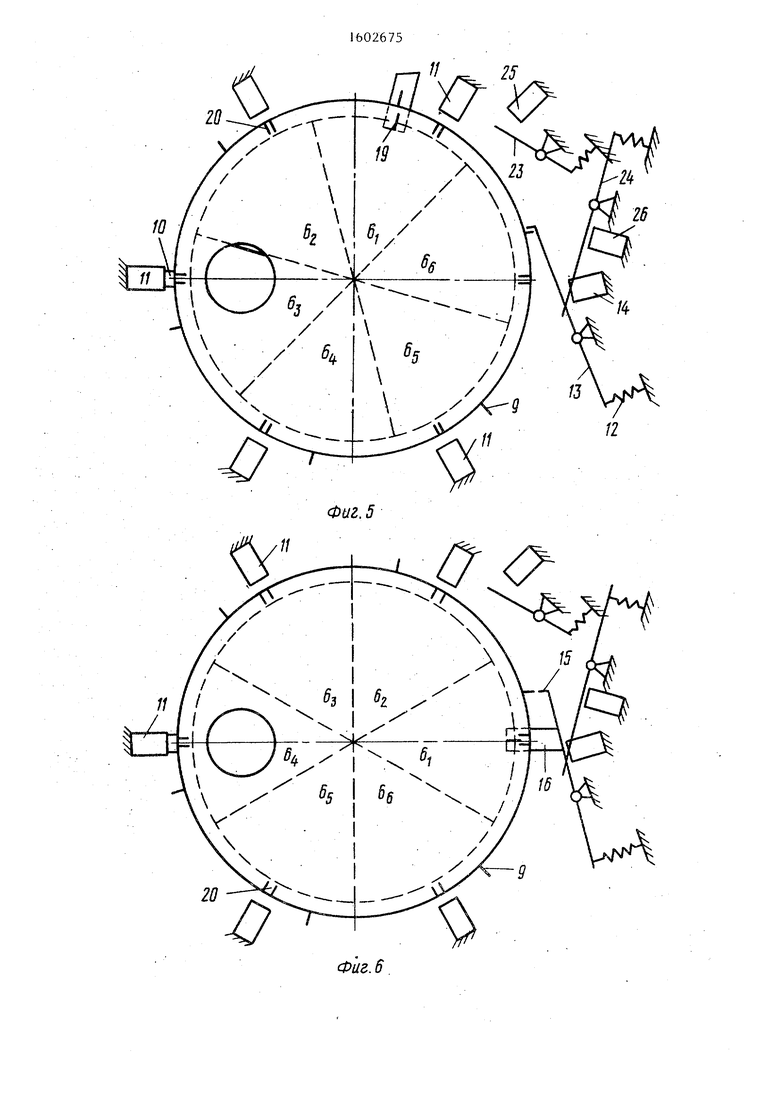
25
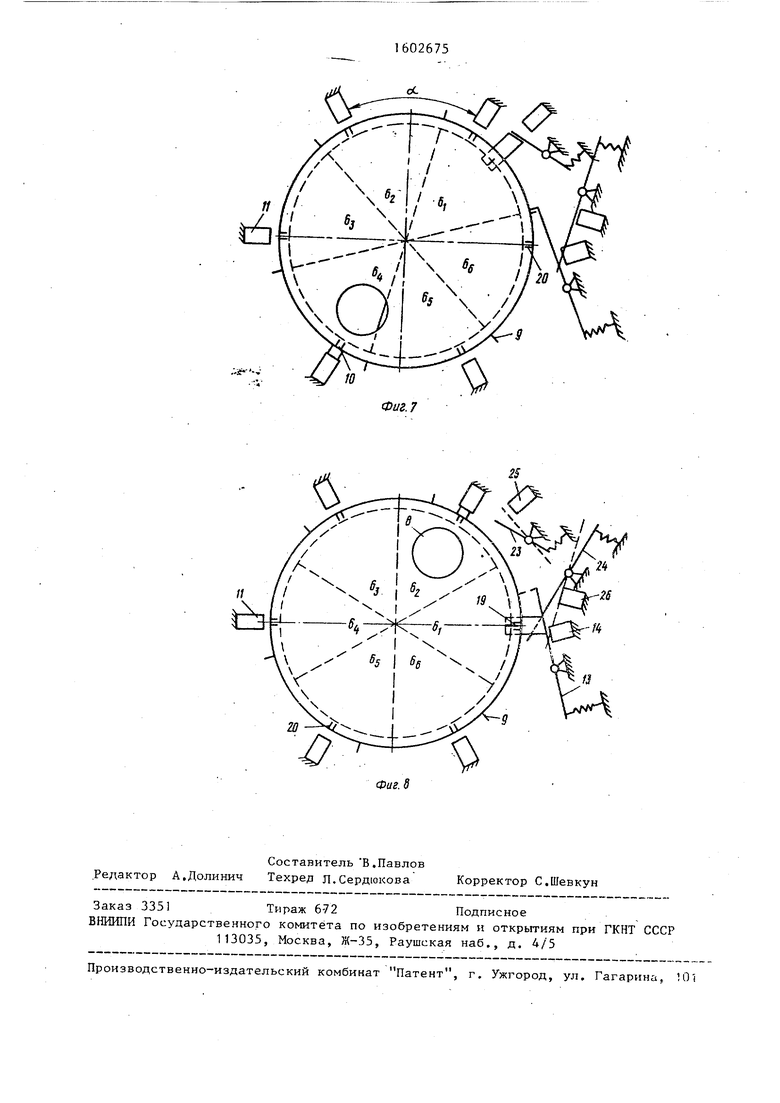
При отключении электромагнита 14 рычаг 13 под действием пружины 12 перемещается в рабочее положение и вхо- с дит в зацепление с четвертым упором 9 9 и тем самым стопорит бункер 4 относительно совершающего второй оборот диска 3 (фиГо5)о Пластина 10 устанавливается в пазу четвертого датчика 10 П. В процессе этого оборота кулачок 16 в ращающегося диска 3 взаимодейст- . вует с рычагом 13 и, преодолевая усилия пружины 12, отжимает его в крайнее отведенное положение, т.е 15 выводит конец 15 и зацепления с четвертым упором 9 (фиг.6), При взаимодействии кулачка 16 и рычага 13 секции 6 диска 3 располагаются против соответствующих датчиков П, В момент разъединения конца 15 рычага с четвертым упором 9 бункер 4 за счет сил трения удерживается на диске 3 и со- вершает совместно с ним поворот на угол оС, равный центральному углу секций, относительно датчиков. Во время этого поворота кулачок 16 смещается за пределы рычага I1 и обеспечивает тем самым его возврат под действием пружины 12 в рабочее положе- 30 ние Возвратившийся в рабочее положение рьиаг 13 располагается между третьим и четвертым упорами 9 и при даль- нейпем повороте диска 3 и бункера 4 входит в зацепление с третьим упо- ром 9, т.е стопорит бункер 4. Застопоренный бункер 4 останавливается в повернутом на угол (X. положении, в котором его пластина iO располагается в пазу следующего пятого датчика iI, а 0 диск 3 продолжает третий оборот
(фиг,7), Таким образом в процессе второго оборота происходит проворот бункера 4 на угол й относительно его исходного положения н, как следствие, 5 заход пластины 0 в паз пятого датчика 11„ После третьего оборота ротора снова происходит поворот бункера 4 на угол (У- в направлении вращения вала и в момент зацепления конца 15 рычага 13 со вторьм упором 9 обеспечивается установка.пластин 10 в пазу очередного шестого датчика 1I и т.д.
0
При размещении пластины 10 в пазу включенного второго датчика I1 подается сигнал на отключение электромагнита 26 копира 24, В момент отключения электромагнита 26 пружина 22 перемещает копир 24 из крайнего отведенного положения в рабочее, а диск и переносит кулачок 16 в зону деист- ВИЯ рычага 13о В процессе взаимодей ствия кулачка 16 с рычагом 13 сек- ции 6 располагаются против соответствующих датчиков 11, окно 8 совмещается с второй секцией 6, а копир 24 входит в контакт с пальцем 28 зуна 17, Далее кулачок 16 выводит конец 15. рычага 13 из зацепления с шестым упором 9j а после этого выступ 19 ползуна 17 под действием копира 24 заводится во вторую прорезь. 20 .5 (фиг„8)о В момент фиксации диска 3 с бункером 4 конец I5 рычага 13 располагается в промежутке между пятым и шестым упорами 9 и контйктирует с наружной noBepxHocTbto бункера 4, а 20 палец 28 воздействует на выключатель 295 который отключает второй датчик 1 11 и включает электромагниты 25 и 26 Под действием электромагнитов копиры
Формула
изобретения
1, Роторный автомат питания по авт.св. № 1488179, отличающийся тем, что, с целью повьппе ния надежности работы, механизм фикс ции вьшолнен в виде упоров закрепле ных равномерно на наружной поверхнос ти dyHKepaj количество которых соответствует количеству накопителей, по пружиненного рьиага, установленного на основании с возможностью поворота от дополнительно , введенного кулачка,, закрепленного на , и взаимо действия с упорами, и пластины, жест ко связанной с бункером и расположен ной с возможностью взаимодействия с дополнительно введенными датчиками системы управления, закрепленными на основании равномерно по окружности.
2о Автомат.по п. 1
, отличаю
-Г-, .-1. IJ UlvJcli ПИ 1 UJJ .КОПИиЫItT TI т, „ „
f.a. 1-- oLLLLr ;
И 22, возвращаются , в крайние отведенные положения При этом рычаг 13 тоже отводится в исходное положение. На этом настройка ротора для подпитки второй секции 6 считается завер- ЗО шейной„ После этого во вращающийся совместно с диском 3 бункер 4 загружают необходимый объем деталей, кото- ,рые через окно 8 пересьтаются во вторую секцию 6. Затем осуществляют под- 35 питку других секций ротора
полненным в виде ползуна, установлен ного с возможностью перемещения по кулачку в радиальном направлении посредством дополнительно введенного механизма управленияр вьтолненного в виде двух кулачков, установленных с возможностью поворота и взаимодейст вия с бункером,посредством дополнительно введенных упора, закрепленного на нем, и прорезей; выполненных в нижней части бункера
22
.25
fW23 21 5U/V
/ .,
ормула
8
изобретения
1, Роторный автомат питания по авт.св. № 1488179, отличающийся тем, что, с целью повьппе- ния надежности работы, механизм фиксации вьшолнен в виде упоров закрепленных равномерно на наружной поверхности dyHKepaj количество которых соответствует количеству накопителей, подпружиненного рьиага, установленного на основании с возможностью поворота от дополнительно , введенного кулачка,, закрепленного на , и взаимодействия с упорами, и пластины, жест- ко связанной с бункером и расположенной с возможностью взаимодействия с дополнительно введенными датчиками системы управления, закрепленными на основании равномерно по окружности.
2о Автомат.по п. 1
, отличаюI т, „ „
oLLLLr ;
полненным в виде ползуна, установленного с возможностью перемещения по кулачку в радиальном направлении посредством дополнительно введенного механизма управленияр вьтолненного в виде двух кулачков, установленных с возможностью поворота и взаимодействия с бункером,посредством дополнительно введенных упора, закрепленного на нем, и прорезей; выполненных в нижней части бункера
22
25
6-Б
75
Фие.З

| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная литьевая машина | 1989 |
|
SU1666324A1 |
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
| Устройство для набора комплекта деталей | 1989 |
|
SU1632737A1 |
| Роторный автомат питания | 1987 |
|
SU1414555A2 |
| Роторный автомат для закалки деталей | 1982 |
|
SU1096289A1 |
| Устройство для контроля и сортировки многогранных пластин | 1981 |
|
SU1079309A1 |
| Автомат для резки труб | 1990 |
|
SU1791079A1 |
| Роторный автомат питания | 1983 |
|
SU1129056A1 |
| Устройство для удаления готовых изделий из пресса | 1975 |
|
SU556056A1 |
| Роторный автомат питания | 1987 |
|
SU1491654A1 |
Изобретение относится к станкостроению и может быть использовано для автоматической подачи заготовок в роторно-конвейерных линиях. Целью изобретения является повышение надежности работы роторного автомата. Это достигается за счет надежного позиционирования вращающихся элементов ротора. Роторный автомат питания содержит смонтированный на основании 1 приводной вал 2, закрепленный на валу диск 3 и бункер 4. Емкость диска 3 разделена перегородками на секции, в каждой из которых расположены накопители 7. В бункере 4 выполнено разгрузочное окно 8. На наружной поверхности бункера 4 равномерно по окружности закреплены упоры 9, количество которых равно количеству секций и пластина 10. Вокруг бункера на основании равномерно по окружности установлены датчики 11. На основании 1 расположен качающийся рычаг 13, управляемый электромагнитом. Диск 3 снабжен фиксатором бункера 4 и механизмом его управления, выполненным в виде двух поворотных копиров 24, управляемых соответственно электромагнитами 26, связанными с датчиками 11. 1 з.п.ф-лы, 8 ил.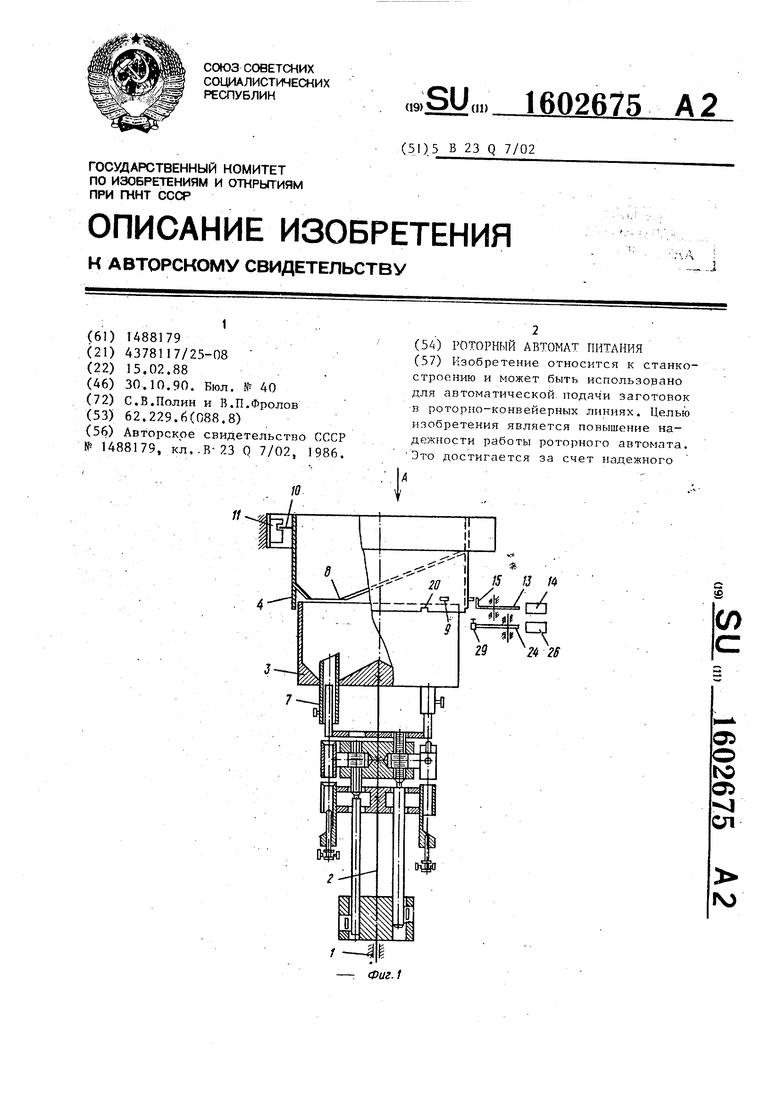
ФигЛ
2Z
f2
Фиг. 5
Фаг. 6
25
П
о-
/
/
Л
.-s-- -v
Ю
II I
A
5
20
S-I-У
v7 « W
| Роторный автомат питания | 1986 |
|
SU1488179A1 |
