Фиг. 1
Изобретение относится к механизации подъемно-транспортных работ, может использоваться в конвейерных системах транспортирования штучных грузов на машиностроительных заводах, складах.и автоматических или поточных механизированных линиях и может найти применение в механизированной поточной линии подготовки поверхности и грунтовки тары.
Целью изобретения является повышение надежности в работе при передаче грузов с движущихся навстречу друг другу подаю- Ш.ИХ приводных роликовых конвейеров.
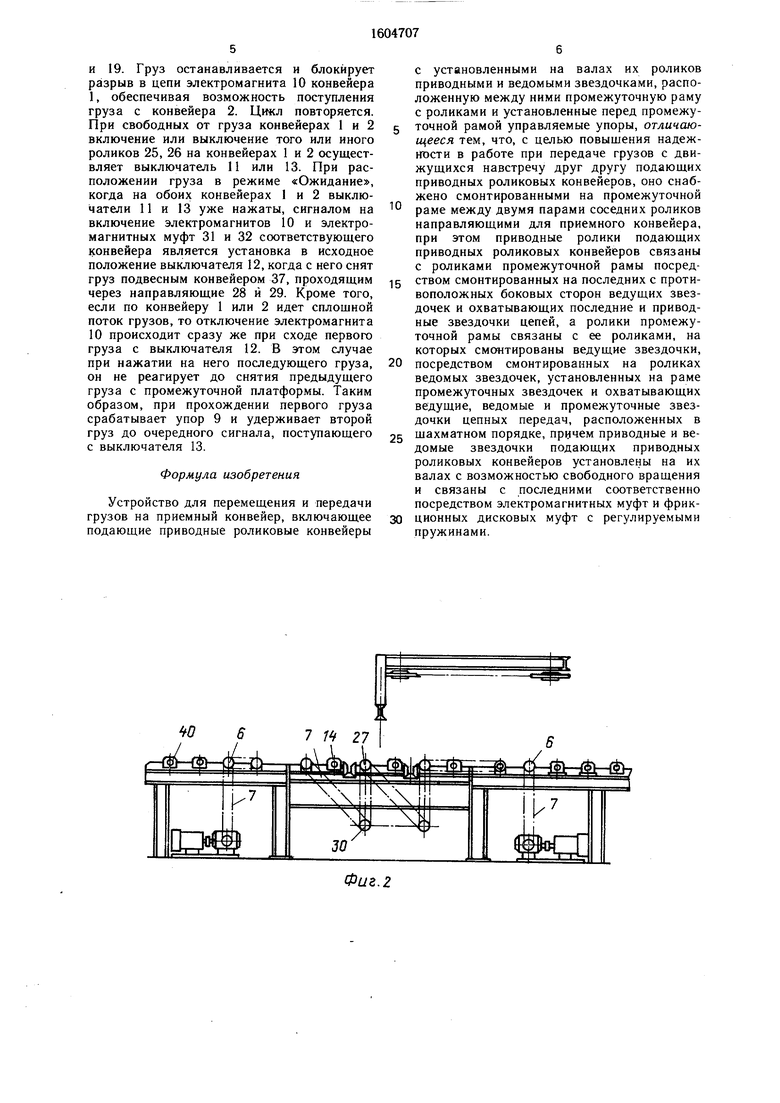
На фиг. 1 изображено устройство для перемещения и передачи грузов на приемный конвейер, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1; на фиг. 5 - сечение В-В на фиг. 1; на фиг. 6 - функциональная схема.
Устройство для перемещения и передачи грузов (фиг. 1 и 2) содержит два подаю- ш,их приводных роликовых конвейера 1 и 2, которые смонтированы на своей раме 3 и включают приводы 4, приводные ролики 5 с приводными и ведомыми звездочками 6 и цепями 7, двуплечие рычаги 8 (фиг. 3) с упором 9 и электромагнитом 10 и конечные выключатели 11 -13. Между конвейерами 1 и 2 установлена промежуточная рама 14 с расположенными на ней ведомыми роликами 15-20. Ведущие звездочки 21 и 22 ведомых роликов 16 и 19 расположены с противоположных боковых сторон рамы 14 и связаны с приводными звездочками 23 и 24 приводных роликов 25 и 26 конвейеров 1 и 2 цепями, а с остальными ведомые звездочками 27 роликов 18, 20 и 15, 17 связаны цепными передачами, расположенными в шахматном порядке, при этом между двумя парами соседних ведомых роликов 16, 17 и 18, 19 установлены направляющие 28 и 29, а цепная передача между звездочками 27 ведомых роликов 18, 20 и 15, 17 соединена с промежуточной звездочкой 30 (фиг. 4). Звездочки 23 и 24 приводных роликов 25 и 26 каждого конвейера 1 и 2 свободно расположены на валу этих роликов и соединены с элейтромаг- нитными муфтами 31 и 32 (фиг. 1 и 5) соответственно, которые жестко закреплены на валу 33 приводного ролика 25 или 26. На остальных ведомых роликах конвейеров 1 и 2 ведомые звездочки 34 (фиг. 4) соединены с фрикционными дисковыми муфтами 35, жестко закрепленными на валу 33 ведомых роликов, и снабжены регулируемой пружиной 36. Над промежуточной рамой 14 установлен подвесной приемный конвейер 37. Конечные выключатели И и 13 снабжены пластинами 38, а упоры 9 подпружинены пружиной 39. Каждые приводные ролики 25 и 26 и ролики 15-20 с двух сторон снабжены подшипниковыми узлами 40 (фиг. 4).
Устройство работает следующим образом.
П)и загрузке конвейеров 1 и 2 включается привод 4 (фиг. 6). При этом приводные ролики 5 конвейеров 1 и 2 вращаются один навстречу другому. Электромагнитные муфты 31 и 32 обесточены и ведомые ролики 15-20, расположенные на раме
14,не вращаются. Груз на конвейерах
Iи 2 движется в сторону промежуточной рамы 14, при подходе к выключателю
IIили 13 груз нажимает на пластину 38, срабатывает, например, выключатель 11, и питание подается на электромагнитную муфту 31 и электромагнит 10 коивейера 2.
Электромагнит 10 конвейера 2 утапливает упор 9, обеспечивая свободное прохождение груза на промежуточную раму 14. Электромагнитная муфта 31 приводит в движение звездочку 24 ролика 26, при этом момент вращения передается на ролик 26 и соответственно на ролики 16, 18 и 20, обеспечивая тем самым свободное перемещение груза с конвейера 2 на промежуточную раму 14. Ролики 15, 17 и 19 отключены от ролика 25 конвейера 1 и, являясь поддерживающими, вращаютсяза счет
трения груза об их поверхность. Когда груз сходит с конвейера 2, упор 9 возвращается в исходное положение, освобождается пластина 38 выключателя 11, а груз проходит на промежуточную раму 14 к выключателю 12, который срабатывает и отключает электромагнитную муфту 31 и соответственно ролики
15,17 и 19. Груз останавливается и блокирует разрыв в цепи электромагнита 10 конвейера 2, обеспечивая возможность поступления последующего груза с конвейера 1 на промежуточную раму 14 после снятия с нее предыдущего груза подвесным конвейером 37. Последний снимает груз и освобождает выключатель 12, который подает сигнал о включении электромагнита 10 конвейера 1 и электромагнитной муфты 32. В это время груз удерживается упором 9 конвейера 1, а выключатель 13 нажат. Включаются электромагнит 10 конвейера 1, который утапливает упор 9, и электромагнитная муфта 32, приводящая в движение звездочку 23 ролика 25, при этом момент вращения передается на ролик 27 и соответственно на ролики 15, 17 и 19, а груз опять перемещается на промежуточную раму 14.
Ролики 16, 18 и 20 отключены от ролика 26 конвейера 2, становятся поддерживающими и вращаются за счет трения о них груза. При прохождении груза с конвейера 1 упор 9 возвращается в исходное
положение, груз проходит на промежуточную раму 14 к выключателю 12, который срабатывает и отключает электромагнитную муфту 32 и соответственно ролики 15, 17
и 19. Груз останавливается и блокирует разрыв в цепи электромагнита 10 конвейера 1, обеспечивая возможность поступления груза с конвейера 2. Цикл повторяется. При свободных от груза конвейерах 1 и 2 включение или выключение того или иного роликов 25, 26 на конвейерах 1 и 2 осуществляет выключатель И или 13. При расположении груза в режиме «Ожидание, когда на обоих конвейерах 1 и 2 выключатели 11 и 13 уже нажаты, сигналом на включение электромагнитов 10 и электромагнитных муфт 31 и 32 соответствующего конвейера является установка в исходное положение выключателя 12, когда с него снят груз подвесным конвейером 37, проходящим через направляющие 28 и 29. Кроме того, если по конвейеру 1 или 2 идет сплошной поток грузов, то отключение электромагнита 10 происходит сразу же при сходе первого груза с выключателя 12. В этом случае при нажатии на него последующего груза, он не реагирует до снятия предыдущего груза с промежуточной платформы. Таким образом, при прохождении первого груза срабатывает упор 9 и удерживает второй груз до очередного сигнала, поступающего с выключателя 13.
Формула изобретения
Устройство для перемещения и передачи грузов на приемный конвейер, включающее подающие приводные роликовые конвейеры
0
5
0
5
0
С установленными на валах их роликов приводными и ведомыми звездочками, расположенную между ними промежуточную раму с роликами и установленные перед промежуточной рамой управляемые упоры, отличающееся тем, что, с целью повыщения надежности в работе при передаче грузов с движущихся навстречу друг другу подающих приводных роликовых конвейеров, оно снабжено смонтированными на промежуточной раме между двумя парами соседних роликов направляющими для приемного конвейера, при этом приводные ролики подающих приводных роликовых конвейеров связаны с роликами промежуточной рамы посредством смонтированных на последних с противоположных боковых сторон ведущих звездочек и охватывающих последние и приводные звездочки цепей, а ролики промежуточной рамы связаны с ее роликами, на которых смонтированы ведущие звездочки, посредством смонтированных на роликах ведомых звездочек, установленных на раме промежуточных звездочек и охватывающих ведущие, ведомые и промежуточные звездочки цепных передач, расположенных в щахматном порядке, причем приводные и ведомые звездочки подающих приводных роликовых конвейеров установлены на их валах с возможностью свободного вращения и связаны с последними соответственно посредством электромагнитных муфт и фрикционных дисковых муфт с регулируемыми пружинами.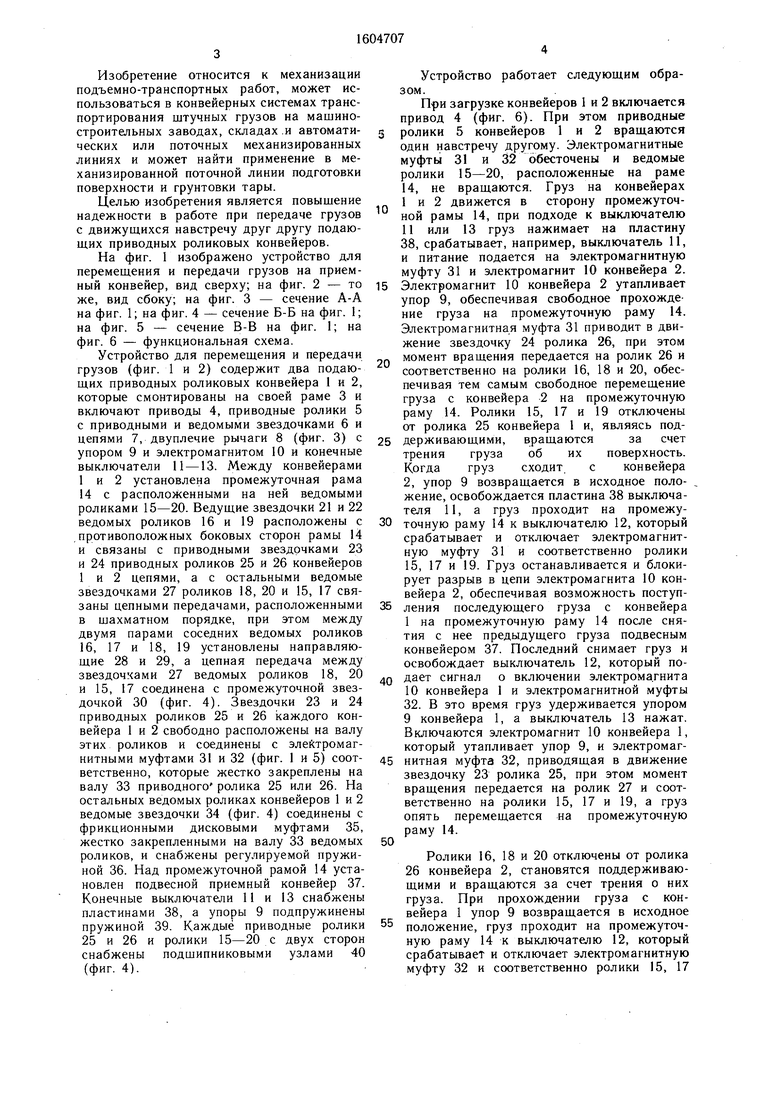
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-складская система | 1986 |
|
SU1370032A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| УСТРОЙСТВО ДЛЯ РАЗБОРА ПАКЕТА УЛОЖЕННЫХ С ПРОКЛАДКАМИ ДОСОК | 1991 |
|
RU2031065C1 |
| Устройство для пакетирования тарно-штучных грузов | 1977 |
|
SU686960A1 |
| Устройство для передачи грузов между перпендикулярно расположенными конвейерами | 1986 |
|
SU1430328A1 |
| Транспортное средство | 1990 |
|
SU1735163A1 |
| АВТОМАТ ДЛЯ ДОЗИРОВКИ РЫБЫ В ТАРУ | 1966 |
|
SU183118A1 |
| Устройство для передачи грузов между параллельно расположенными конвейерами | 1989 |
|
SU1676962A1 |
| Устройство для штабелирования штучных грузов | 1983 |
|
SU1224228A1 |
| Устройство для подачи и укладкищиТОВ | 1979 |
|
SU812657A1 |
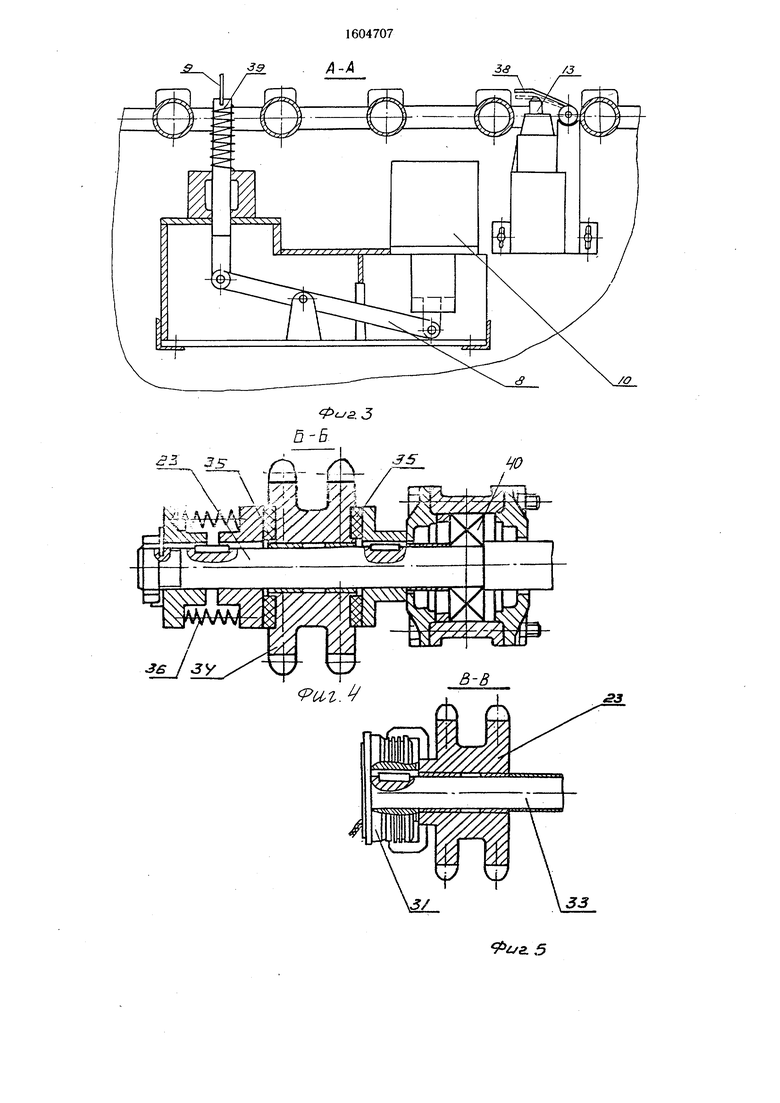
Изобретение относится к конвейерному транспорту и позволяет повысить надежность работы при передаче грузов с движущихся навстречу друг другу подающих приводных роликовых конвейеров (К) 1,2. Между К 1 и 2 расположена промежуточная рама 14 с роликами (Р) 15-20. Перед рамой 14 установлены управляемые упоры 9. Между двумя парами Р 16, 17 и 18, 19 на раме 14 смонтированы направляющие 28, 29 для приемного К 37. Приводные Р 25, 26 роликовых К 1, 2 связаны с Р 19, 16 рамы 14 через смонтированные на Р 19, 16 с противоположных боковых сторон рамы 14 ведущие звездочки 21, 22 и охватывающие их приводные звездочки 23, 24 цепи. Между собой Р 18 и 20, 15 и 17 и 19 и 16 связаны через ведомые звездочки 27, звездочки 21, 22, промежуточные звездочки, смонтированные на раме 14, и охватывающие эти звездочки цепные передачи, расположенные в шахматном порядке. При этом звездочки 23, 24 установлены на валах Р 5 роликовых К 1,2 с возможностью свободного вращения и связаны с последними соответственно через электромагнитные муфты (М) 31, 32 и фрикционные дисковые М с регулируемыми пружинами. Груз перемещается по К 1, 2 к раме 14, при подходе к которой включается одна из М 31, 32, и часть Р, например Р 16, 18, 20, подает груз на раму 14 под К 37. 6 ил.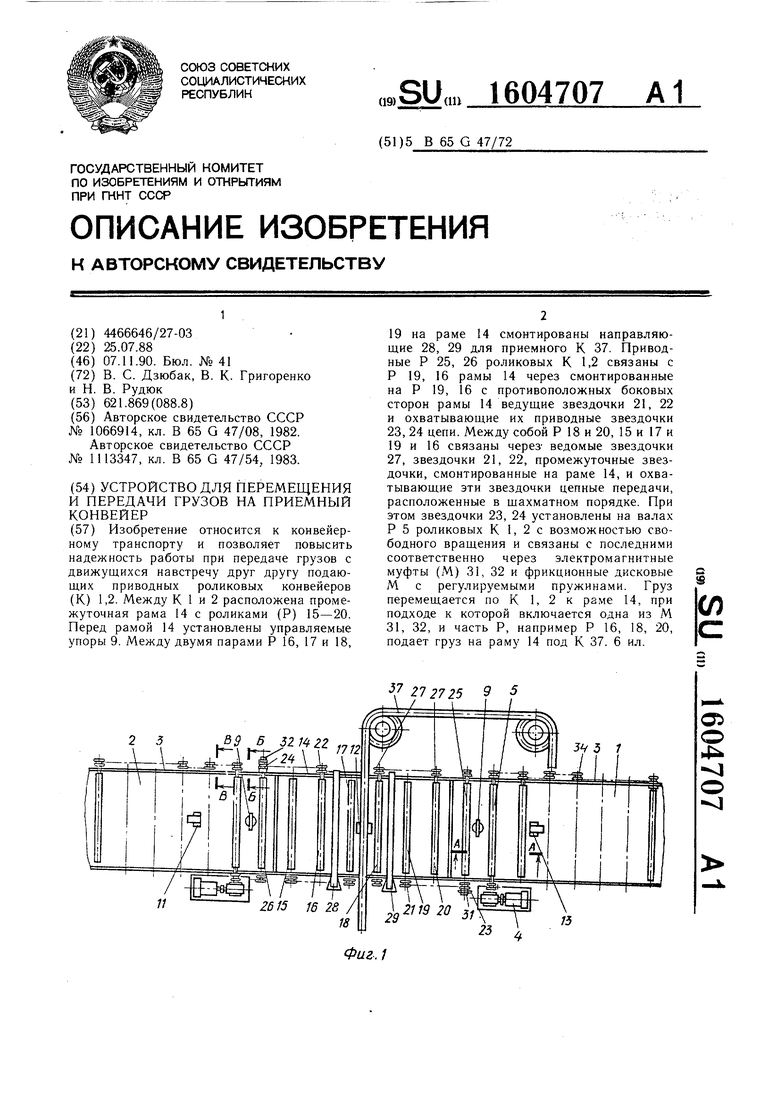
W
Фиг. 2
/J
г.5
j
| Устройство для распределения потока изделий на конвейере | 1982 |
|
SU1066914A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
