Изобретение относится к машиностроению и может быть использовано для захвата и контроля количества заготовок с помощью промышленных роботов.
Цель изобретения - повышение надежности поштучной подачи заготовок.
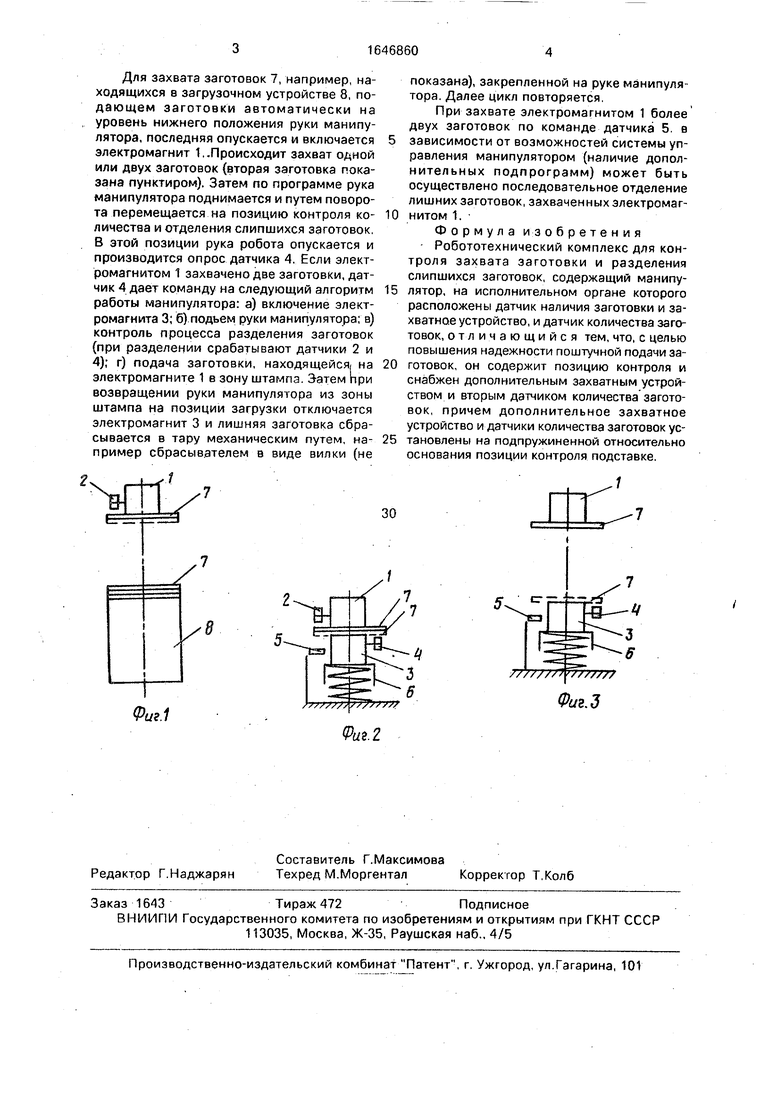
На фиг.1 показано захватное устройство над загрузочной позицией после захвата заготовок; на фиг 2 - то же, на позиции контроля; на фиг.З - то же, над позицией контроля после отделения слипшихся заготовок.
Робототехнический комплекс содержит манипулятор, на исполнительном органе которого расположены захватное устройство (электромагнит) 1 и датчик 2 наличия заготовки, и позицию контроля с электромагнитом 3 и датчиками 4 и 5 количества заготовок, установленными на подпружиненной относительно основания позиции контроля подставке 6
Для захвата заготовок из немагнитных материалов в качестве захватного устройства используется вакуумный захват.
Датчик 2 настраивается на срабатывание от верхней поверхности заготовки, захваченной электромагнитом 1.
Уровень рабочей поверхности электромагнита 3 выставляется ниже уровня нижнего положения рабочей поверхности электромагнита 1 на величину, равную двум толщинам заготовки.
Датчик 4 настраивается на срабатывание от нижней поверхности заготовки, находящейся на электромагните 3.
Датчик 5 настраивается на срабатывание при перемещении электромагнита 3 вниз на величину, равную или большую толщине одной заготовки.
Јь О
О О
Для захвата заготовок 7, например, находящихся в загрузочном устройстве 8, подающем заготовки автоматически на уровень нижнего положения руки манипулятора, последняя опускается и включается электромагнит t..Происходит захват одной или двух заготовок (вторая заготовка показана пунктиром). Затем по программе рука манипулятора поднимается и путем поворота перемещается на позицию контроля количества и отделения слипшихся заготовок, В этой позиции рука робота опускается и производится опрос датчика 4. Если электромагнитом 1 захвачено две заготовки, датчик 4 дает команду на следующий алгоритм работы манипулятора: а) включение электромагнита 3; б) подъем руки манипулятора; в) контроль процесса разделения заготовок (при разделении срабатывают датчики 2 и 4); г) подача заготовки, находящейся/ на электромагните 1 в зону штампа. Затем при возвращении руки манипулятора из зоны штампа на позиции загрузки отключается электромагнит 3 и лишняя заготовка сбрасывается в тару механическим путем, например сбрасывателем в виде вилки (не
W Т
0
5
0
5
показана), закрепленной на руке манипулятора. Далее цикл повторяется.
При захвате электромагнитом 1 более двух заготовок по команде датчика 5 в зависимости от возможностей системы управления манипулятором (наличие дополнительных подпрограмм) может быть осуществлено последовательное отделение лишних заготовок, захваченных электромагнитом 1.
Формула изобретения Робототехнический комплекс для контроля захвата заготовки и разделения слипшихся заготовок, содержащий манипулятор, на исполнительном органе которого расположены датчик наличия заготовки и захватное устройство, и датчик количества заготовок, отличающийся тем, что, с целью повышения надежности поштучной подачи заготовок, он содержит позицию контроля и снабжен дополнительным захватным устройством и вторым датчиком количества заготовок, причем дополнительное захватное устройство и датчики количества заготовок установлены на подпружиненной относительно основания позиции контроля подставке.
Л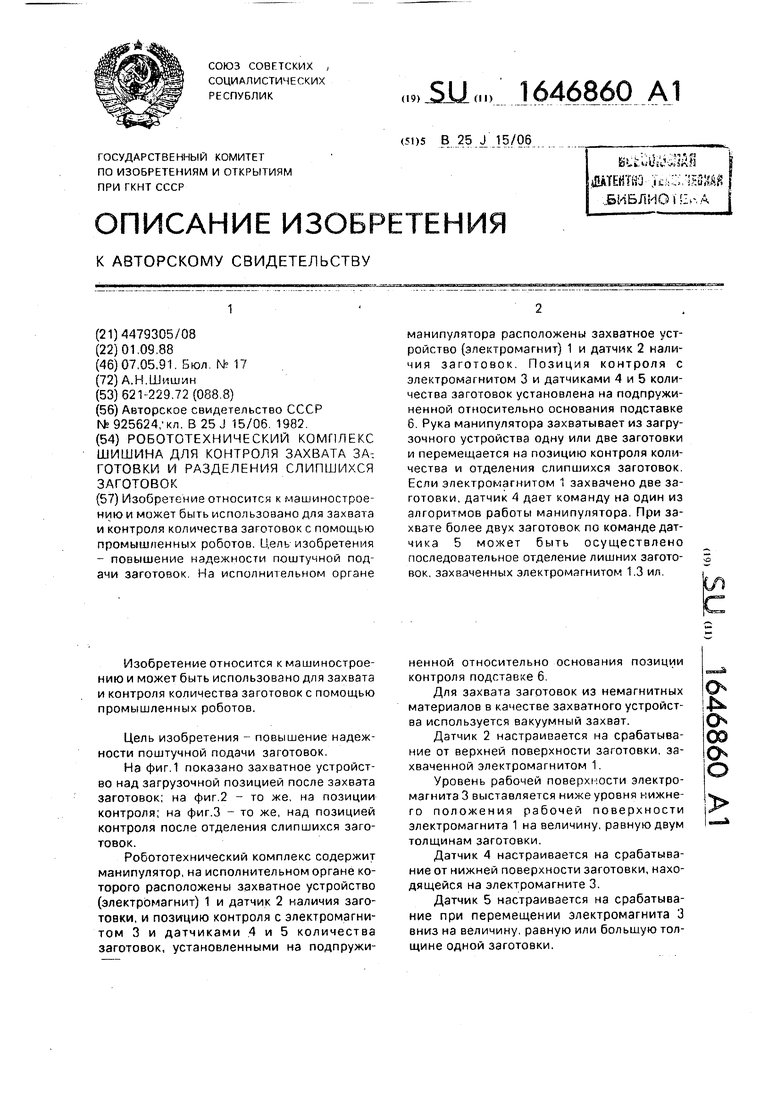
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Автоматизированный комплекс для листовой штамповки | 1986 |
|
SU1456269A1 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| Способ поштучного отделения ферромагнитных листов от стопы и устройство для его осуществления | 1984 |
|
SU1194547A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Устройство для подачи заготовок к обрабатывающей машине | 1987 |
|
SU1530308A1 |
| Способ отделения листов от стопы и подачи их в обрабатывающую машину и устройство для его осуществления | 1986 |
|
SU1510974A1 |
| Электромагнитный схват | 1985 |
|
SU1296407A1 |
| Устройство для поштучного отделения плоских деталей из стопы | 1985 |
|
SU1355334A1 |
Изобретение относится к машиностроению и может быть использовано для захвата и контроля количества заготовок с помощью промышленных роботов. Цель изобретения - повышение надежности поштучной подачи заготовок На исполнительном органе манипулятора расположены захватное устройство (электромагнит) 1 и датчик 2 наличия заготовок Позиция контроля с электромагнитом 3 и датчиками 4 и 5 количества заготовок установлена на подпружиненной относительно основания подставке 6 Рука манипулятора захватывает из загрузочного устройства одну или две заготовки и перемещается на позицию контроля количества и отделения слипшихся заготовок Если электромагнитом 1 захвачено две заготовки, датчик 4 дает команду на один из алгоритмов работы манипулятора. При захвате более двух заготовок по команде дат- чика 5 может быть осуществлено последовательное отделение лишних заготовок, захваченных электромагнитом 1.3 ил
/
Фиг.1
(Pus 2
s
Фиг.З
| Устройство контроля захвата листовой заготовки рукой промышленного робота | 1980 |
|
SU925624A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
