мещается ТЛ 1 по роликам 8, установленным на осях 9, закрепленным в Р 7 Конвейер-перекладчик имеет механизм поворота детали, содержащий поворотные основные и дополнительные рамкги 10, закрепленные на осях 11. 12, которые установлены на основании. На осях 11, 12 установлены зубчатые колеса 13, 14 и соответственно соединены с зубчатым колесом 15, установленным на оси 16, и рейкой 17, передающей поворот на другие ролики через колеса 14, образующие с рейкой 17 зубчато-реечную передачу. Ось 9 соединена с осью 16 через шэтун 18, обеспечивая передачу крутящего момента с Р 7 на зубчатое колесо 15. Шатун
18 является кинематической связью рамки 10 с приводом подъема. После установки деталей 20 привод поворачивает Р 7 вокруг оси 6 через тягу, а ТЛ 1 опускается. С движением Р 7 поворачивается шатун 18 и через зубчатые колеса 15, 13 и 14 и рейку 17, передает вращение поворотным рамкам 10. Как только ТЛ 1 опускается и поворотные рзмки 10 занимают вертикальное положение, привод возвратно-поступательного перемещения начинает перемещать ТЛ 1 вправо до исходного положения При этом поворотные рамки 10 остаются неподвиж- ныму) и готовыми для следующего цикла. 1 ,з г ф-лы, А ил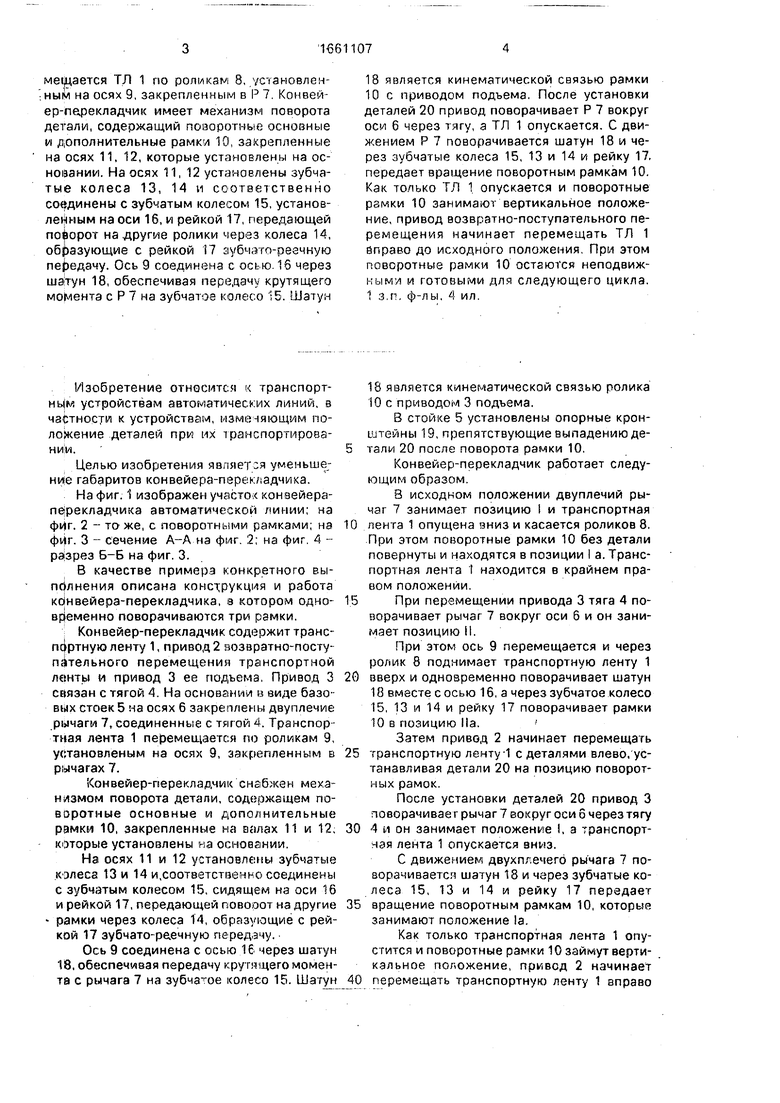
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система | 1985 |
|
SU1475876A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Устройство для поворота деталей на конвейере | 1987 |
|
SU1475870A2 |
| ТРАНСПОРТЕР-ПЕРЕКЛАДЧИК ШТУЧНЫХ ЗАГОТОВОК | 1969 |
|
SU244605A1 |
| Устройство поворота деталей на конвейере | 1986 |
|
SU1348270A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ДРЕНАЖНЫХ ТРУБ | 1970 |
|
SU271358A1 |
| Комбинированная машина для теребления, очесывания головок и обмолота льна | 1931 |
|
SU30017A1 |
| Устройство для подачи материала в рабочую зону пресса и удаления отштампованных изделий | 1985 |
|
SU1321504A1 |
| Устройство для вырубки изделий из резины | 1977 |
|
SU994286A2 |
| Система управления транспортного средства | 1989 |
|
SU1781099A1 |
Изобретение относится к транспортным устр-вам автоматических линий, в частности к устр-вам, изменяющим положение деталей при их транспортировании. Цель - уменьшение габаритов конвейера-перекладчика. Конвейер-перекладчик включает транспортную ленту (ТЛ) 1, привод ее возвратно-поступательного перемещения и привод ее подъема. На основании в виде базовых стоек 5 на осях закреплены двуплечие рычаги (Р) 7, соединенные с тягой. Перемещается ТЛ 1 по роликам 8, установленным на осях 9, закрепленным в Р 7. Конвейер-перекладчик имеет механизм поворота детали, содержащий поворотные основные и дополнительные рамки 10, закрепленные на осях 11, 12, которые установлены на основании. На осях 11, 12 установлены зубчатые колеса 13, 14 и соответственно соединены с зубчатым колесом 15, установленным на оси 16, и рейкой 17, передающей поворот на другие ролики через колеса 14, образующие с рейкой 17 зубчато-реечную передачу. Ось 9 соединена с осью 16 через шатун 18, обеспечивая передачу крутящего момента с Р 7 на зубчатое колесо 15. Шатун 18 является кинематической связью рамки 10 с приводом подъема. После установки деталей 20 привод поворачивает Р 7 вокруг оси 6 через тягу, а ТЛ 1 опускается. С движением Р 7 поворачивается шатун 18 и через зубчатые колеса 15, 13 и 14 и рейку 17 передает вращение поворотным рамкам 10. Как только ТЛ 1 опускается и поворотные рамки 10 занимают вертикальное положение, привод возвратно-поступательного перемещения начинает перемещать ТЛ 1 вправо до исходного положения. При этом поворотные рамки 10 остаются неподвижными и готовыми для следующего цикла. 1 з.п.ф-лы, 4 ил.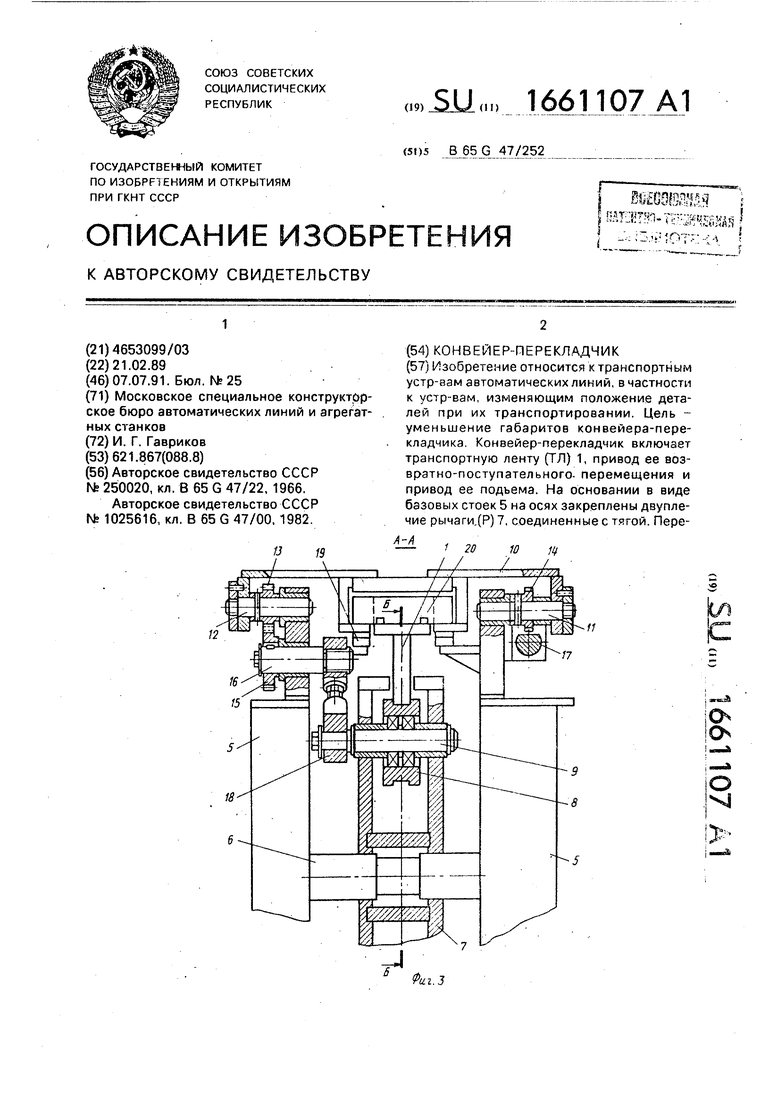
Изобретение относите к транспортным устройствам автоматических линий, в частности к устройствам, изменяющим положение деталей прм их фанспоргирова- ним.
Целью изобретения является уменьшение габаритов конвейера-перек/.адчика.
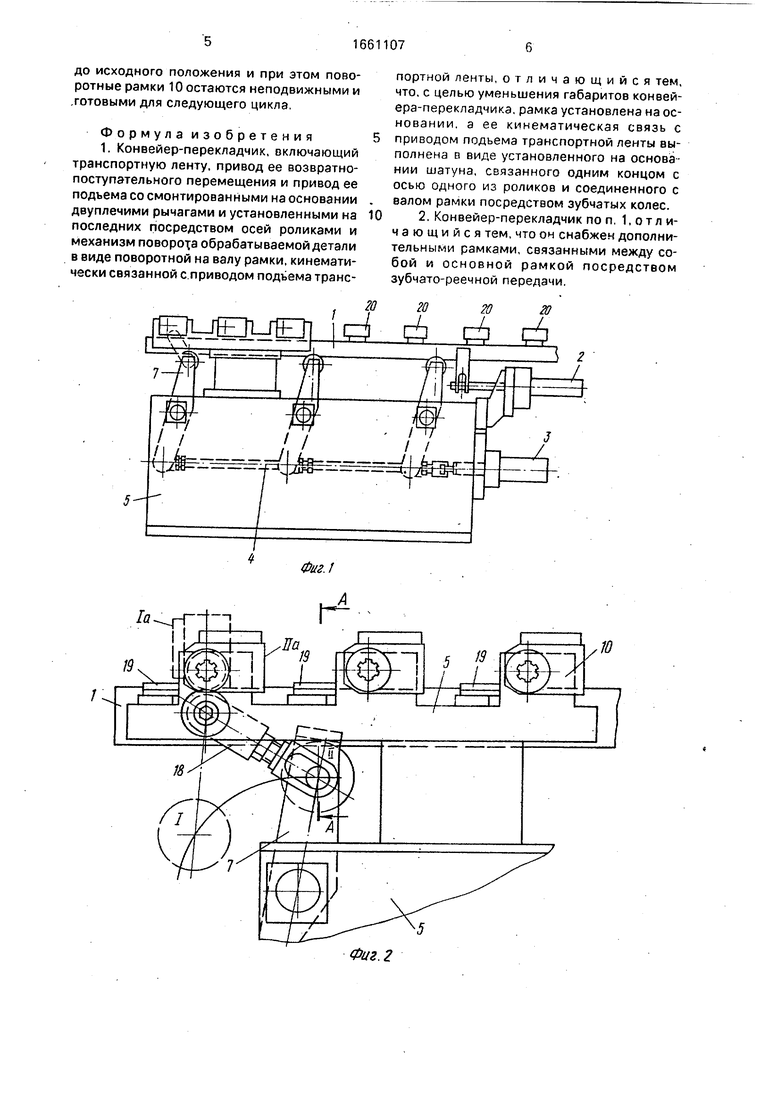
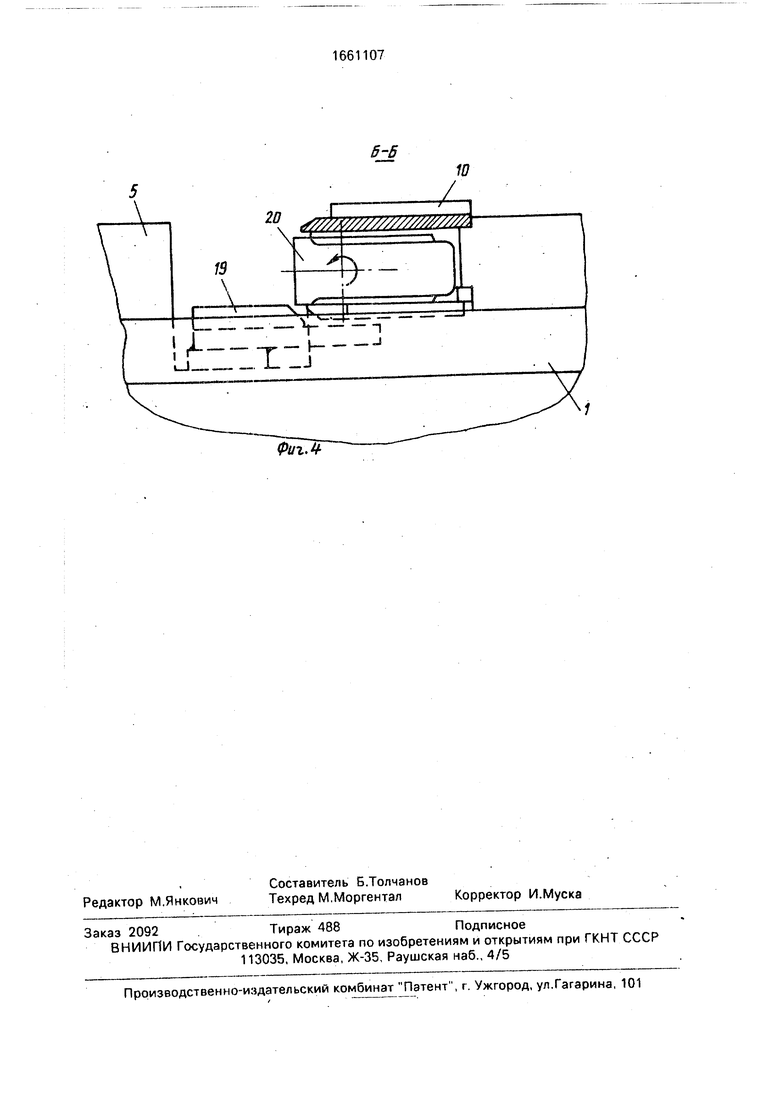
На фиг. 1 изображен участо конвейера- перекладчика автоматической линии; на фИг. 2 - то же, с поворотными рамками, на фиг. 3 - сечение А-А на фиг 2, на фиг 4 - разрез Б-Б на фиг. 3.
В качестве примерз конкретного вы- пблнения описана конструкция и работа конвейера-перекладчика, в котором одновременно поворачиваются три рамки.
Конвейер-перекладчик содержит транспортную ленту 1, привод 2 возвратно-поступательного перемещения транспортной ленты и привод 3 ее подъема, Привод 3 связан с тягой 4. На основании в виде базовых стоек 5 на осях 6 закреплены двуплечие рычаги 7, соединенные с тягой 4. Транспор тная лента 1 перемещается по роликам 9, установлении на осях 9, закрепленным в рычагах 7.
Конвейер-перекладчик снабжен механизмом поворота детапи, содержащем поворотные основные и дополнительные рамки 10, закрепленные на валах 11 и 12, которые установлены на основании.
На осях 11 и 12 установлены зубчатые кэлеса 13 и 14 и,соответственно соединены с зубчатым колесом . сидящем на оси 16 и рейкой 17, передающей г.овооот на другие - рамки через колеса 14, образующие с рейкой 17 зубчато-реечную передачу.
Ось 9 соединена с осью 16 через шатун 18, обеспечивая передачу грунчщего момента с рычага 7 на зубчатое колесо 15. Шагун
18 является кинематической связью ролика 0 с приводом 3 подъема.
В стойке 5 установлены опорные крон- ытейны 19, препятствующие выпадению де5 тали 20 после поворота рамки 10.
Конвейер-перекладчик работает следующим образом
В исходном положении двуплечий рычаг 7 занимает позицию I и транспортная
10 лента 1 опущена вниз и касается роликов 8. При этом поворотные рамки 10 без детали повернуты и находятся в позиции I а. Транспортная лента I находится в крайнем правом положении
15 При перемещении привода 3 тяга 4 поворачивает рычаг 7 вокруг оси 6 и он занимает позицию II.
При этом ось 9 перемещается и через ролик 8 поднимает транспортную ленту 1
20 вверх и одновременно поворачивает шатун 18 вместе с осью 16, а через зубчатое колесо 15, 13 и 14 и рейку 17 поворачивает рамки 10 в позицию На.
Затем привод 2 начинает перемещать
25 транспортную ленту 1 с деталями влево, устанавливая детали 20 на позицию поворотных рамок
После установки деталей 20 привод 3 поворачивав г рычаг 7 вокруг оси 6 через тягу
30 4 и он занимает положение I. з ранспорт- нэя лента 1 опускается вниз.
С движением двухпгечего рычага 7 поворачивается шатун 18 и через зубчатые колеса 15, 13 и 14 и рейку 17 передает
35 вращение поворотным рамкам 10, которые занимают положение la.
Как только транспортная лента 1 опу- с гится и поворотные рамки 10 займут верти- кальное положение, привод 2 начинает
40 перемещать транспортную ленту 1 вправо
до исходного положения и при этом поворотные рамки 10 остаются неподвижными и .готовыми для следующего цикла.
Формула изобретения 1. Конвейер-перекладчик, включающий транспортную ленту, привод ее возвратно- поступательного перемещения и привод ее подъема со смонтированными на основании двуплечими рычагами и установленными на последних посредством осей роликами и механизм поворота обрабатываемой детали в виде поворотной на валу рамки, кинематически связанной с приводом подъема трансФиг. 1
0
портной ленты, отличающийся тем, что, с целью уменьшения габаритов конвейера-перекладчика, рамка установлена на основании, а ее кинематическая связь с приводом подьема транспортной ленты выполнена в виде установленного на основании шатуна, связанного одним концом с осью одного из роликов и соединенного с валом рамки посредством зубчатых колес.
Ю
Фиг.2
ФигЛ
/
w
| 1966 |
|
SU250020A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для кантования изделий на конвейере | 1982 |
|
SU1025616A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
