Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для разборки деталей типа дисковых пил.
Целью изобретения является расшире- 5 ние технологических возможностей путем обеспечения захвата, съема, перемещения в направлении, перпендикулярном оси захвата, и сброса деталей в лоток.
На фиг. 1 показан манипулятор, общий 10 вид, разрез; на фиг. 2 - разрез А-А на фиг. 1,
Манипулятор состоит из корпуса 1, силового цилиндра 2, на котором для его поворота закреплены цапфы 3, установленные 15 во втулках 4 на кронштейнах 5, жестко закрепленных на корпусе 1,захватной головки 6. На выходном звене привода 7 силового цилиндра 2 выполнена приемная выемка 8, по обе стороны которой в проушинах 9 на 20 осях 10 расположены губки, выполненные в виде эксцентриков Постановленных оппо- зитно один другому. Для осуществления ав- томатического управления захватной головкой 6 экцентрики 11 связаны с сило- 25 вым цилиндром 2 посредством жестко закрепленных на силовом цилиндре 2 планок 12 с продольными прорезями 13 и жестко закрепленных на наружной поверхности эксцентриков 11 пальцев 14, к которым шар- 30 нирно присоединены тяги 15, другие концы которых снабжены штифтами 16. размещенными с возможностью перемещения их в прорезях 13 планок 12, Для управления поворотом силового цилиндра 2 в направле- 35 ним, перпендикулярном оси захвйтной головки на корпусе 1 перпендикулярно осям цапф 3 жестко закреплены копирные планки 17, а на выходном звене привода 7 установлены опоры 18 качения с возможностью 40 вращения в плоскости копирных планок 17 и взаимодействия с ними.
Манипулятор работает следующим образом,
В исходном положении поршень сило- 45 вого цилиндра 2 находится в верхнем положении. Штифты 16, закрепленные в тягах 15, расположены до упора вверху прорезей 13, а эксцентрики 11 разведены в стороны с
Опоры качения, обкатываясь по копирным планкам 17, приводят манипулятор в вертикальное положение, и его ось устанавливается в плоскости диска 19 и сегмента 20. При дальнейшем движении выходного звена привода 7 с захватной головкой 6 в крайнее нижнее положение, штифты 16 доходя до нижних упоров в прорезях 13, и происходит поворот пальцев 14 вместе с эксцентриками 11, которыми осуществляется зажим сегмента 20. При обратном движении выходного звена привода 7 с захватной головкой 6 происходит дополнительный зажим сегмента 20 эксцентриками 11 и осуществляется его сьем с диска 19, а затем опоры качения 18, перемещаясь по копирным планкам 17, отклоняют цилиндр 2 в сторону лотка (не показан) с обработанными сегментами. При дальнейшем перемещении выходного звена привода 7 штифты 16, дойдя до конца прорези 13 в пл анках 12, останавливают перемещение тяг 15, а эксцентрики 11 при этом разводятся в противоположные стороны, освободив сегмент 20, который падает в лоток. Цикл захвата и съема сегмента 20 с диска 19, перемещения его в направлении, перпендикулярном оси захватной головки, и сброса его в лоток окончен. Путем автоматического переключения силового цилиндра 2 на обратный вход выходного звена привода 7 с захватной головкой 6 начинается следующий цикл работы манипулятора, одновременно при этом происходит поворот на определенный угол диска 19, на котором производят абразивную обработку боковых поверхностей дисковых пил, и уста- j-ювкэ для съема следующего обработанного сегмента.
Формула изобретения Манипулятор, содержащий корпус, привод, захватную головку, включающую оппо- зитно установленные одна относительно другой губки, выполненные Б виде эксцентриков, шарнирно связанных с тягой, установленной на выходном звене привода, расположенном в прорези корпуса с возможностью перемещения, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен
образованием между ними максимального 50 копирной планкой, смонтированной на корпромежутка. Силовой цилиндр 2 отклонен
на цапфах 3 вправо на максимальный угол,
а опоры качения 18 находятся на копирных
планках 17 в крайнем верхнем положении,
При включении манипулятора выходное 55
звено привода выдвигается вниз к диску 19.
пусе, а захватная головка установлена на корпусе с возможностью относительного поворота, причем выходное звено привода смонтировано с возможностью взаимодействия с копирной планкой посредством введенной опоры качения.
Опоры качения, обкатываясь по копирным планкам 17, приводят манипулятор в вертикальное положение, и его ось устанавливается в плоскости диска 19 и сегмента 20. При дальнейшем движении выходного звена привода 7 с захватной головкой 6 в крайнее нижнее положение, штифты 16 доходя до нижних упоров в прорезях 13, и происходит поворот пальцев 14 вместе с эксцентриками 11, которыми осуществляется зажим сегмента 20. При обратном движении выходного звена привода 7 с захватной головкой 6 происходит дополнительный зажим сегмента 20 эксцентриками 11 и осуществляется его сьем с диска 19, а затем опоры качения 18, перемещаясь по копирным планкам 17, отклоняют цилиндр 2 в сторону лотка (не показан) с обработанными сегментами. При дальнейшем перемещении выходного звена привода 7 штифты 16, дойдя до конца прорези 13 в пл анках 12, останавливают перемещение тяг 15, а эксцентрики 11 при этом разводятся в противоположные стороны, освободив сегмент 20, который падает в лоток. Цикл захвата и съема сегмента 20 с диска 19, перемещения его в направлении, перпендикулярном оси захватной головки, и сброса его в лоток окончен. Путем автоматического переключения силового цилиндра 2 на обратный вход выходного звена привода 7 с захватной головкой 6 начинается следующий цикл работы манипулятора, одновременно при этом происходит поворот на определенный угол диска 19, на котором производят абразивную обработку боковых поверхностей дисковых пил, и уста- j-ювкэ для съема следующего обработанного сегмента.
Формула изобретения Манипулятор, содержащий корпус, привод, захватную головку, включающую оппо- зитно установленные одна относительно другой губки, выполненные Б виде эксцентриков, шарнирно связанных с тягой, установленной на выходном звене привода, расположенном в прорези корпуса с возможностью перемещения, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен
пусе, а захватная головка установлена на корпусе с возможностью относительного поворота, причем выходное звено привода смонтировано с возможностью взаимодействия с копирной планкой посредством введенной опоры качения.
А-А
и-J
V
v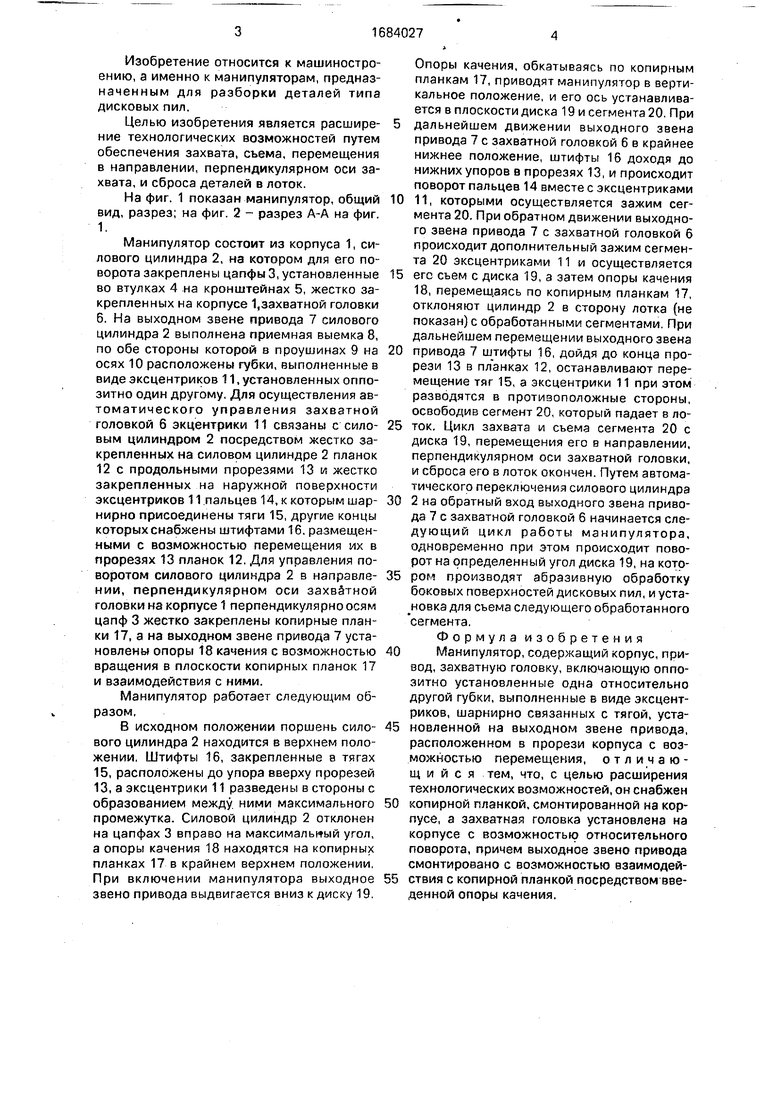
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват | 1986 |
|
SU1333576A1 |
| Загрузочное устройство шлифовального станка | 1987 |
|
SU1569171A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Установка для изготовления предварительно напряженных железобетонных объемных элементов | 1976 |
|
SU710804A1 |
| Мобильный монтажный комплекс для сборно-разборных трубопроводов с раструбными соединениями труб | 2024 |
|
RU2841447C1 |
| Захватное устройство | 1981 |
|
SU1006211A1 |
| ПОСЕВНОЙ КОМБИНИРОВАННЫЙ АГРЕГАТ | 1997 |
|
RU2126199C1 |
| Наматочное устройство | 1980 |
|
SU867450A1 |
| Промышленный робот | 1986 |
|
SU1335446A1 |
| Автооператор | 1989 |
|
SU1726193A1 |
Изобретение относится к машиностроению, а именно к манипуляторам, предназна- ченным для разборки деталей типа дисковых пил. Цель изобретения - расширение технологических возможностей путем обеспечения захвата, съема, перемещения в направлении, перпендикулярном оси захвата, и сброса деталей в лоток. Манипулятор состоит из корпуса 1, силового цилиндра 2 и захватной головки 6. На выходном звене привода 7 силового цилиндра 2 на осях 10 установлены губки, выполненные в виде эксцентриков 11,установленных оппозитно друг другу. Эксцентрики 11 связаны с силовым цилиндром 2 посредством жестко закрепленных на силовом цилиндре планок 12 с продольными прорезями 13 и жестко закрепленных на эксцентриках 11 пальцев 14, к которым шарнирно присоединены тяги 15 с штифтами 16, размещенными с возможностью перемещения их в прорезях 13 планок 12. На корпусе 1 закреплены жестко копир- ные планки 17 с возможностью взаимодействия с выходным звеном привода 7 посредством опоры 18 качения, 2 ил. Ј (Л С о 00 fe го VI ю 20
| Захватное устройство для листового материала | 1986 |
|
SU1399252A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
