о
00 СП 00
со VJ
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1999 |
|
RU2194662C2 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1364565A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Машина для погрузки и выгрузки тарно-штучных грузов | 1989 |
|
SU1728106A1 |
| Кантователь для штучных изделий | 1986 |
|
SU1377229A1 |
| Механизм управления приводом сбрасывателя штучных изделий с подающего органа | 1985 |
|
SU1414734A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Транспортное средство для перевозки штучных грузов | 1977 |
|
SU695867A1 |
| Тележечный конвейер | 1980 |
|
SU918198A1 |
Изобретение относится к конвейерост- роению и позволяет повысить технологичность и надежность устройства в работе. Устройство включает роликовые конвейеры (РК) 1, подвижную относительно них секцию (С) 2 и смонтированные на торцах рам РК 1 и С 2 концевые ограничители (КО) 3 груза. Последние выполнены в укрепленных на рамах РК 1 и С 2 втулок и размещенных в них подпружиненных вверх стержней с роликами, установленными на их верхних концах, и с одноплечими рычагами. Рычаги установлены на нижних концах С 2 и подпружинены с тыльной стороны к рамам. При повороте С 2 до совпадения ее продольной оси с осью одного РК 1 она останавливается, при этом КО 3 рычагами входят во взаимодействие и последние поворачиваются на 90°. Ролики стержней КО 3, установленные на одном РК 1 и С2, располагаются на общей оси и при включении приводов РК 1 и С2 груз перемещается между ними. Стержни КО 3 при этом под действием груза проседают и груз передается между ними без остановки. 2 з.п. ф-лы, 11 ил. сл С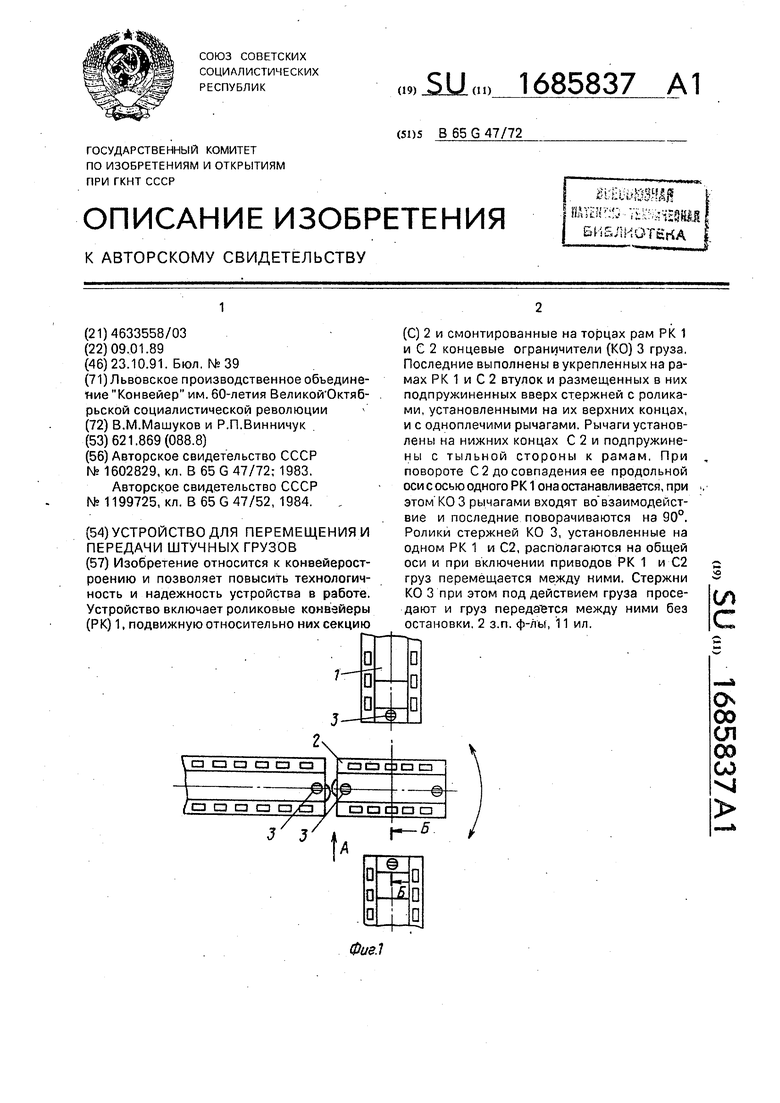
3 J
IИзобретение относится к конвейерост- роению, а именно к устройствам внутрицехового транспортирования затаренных грузов.
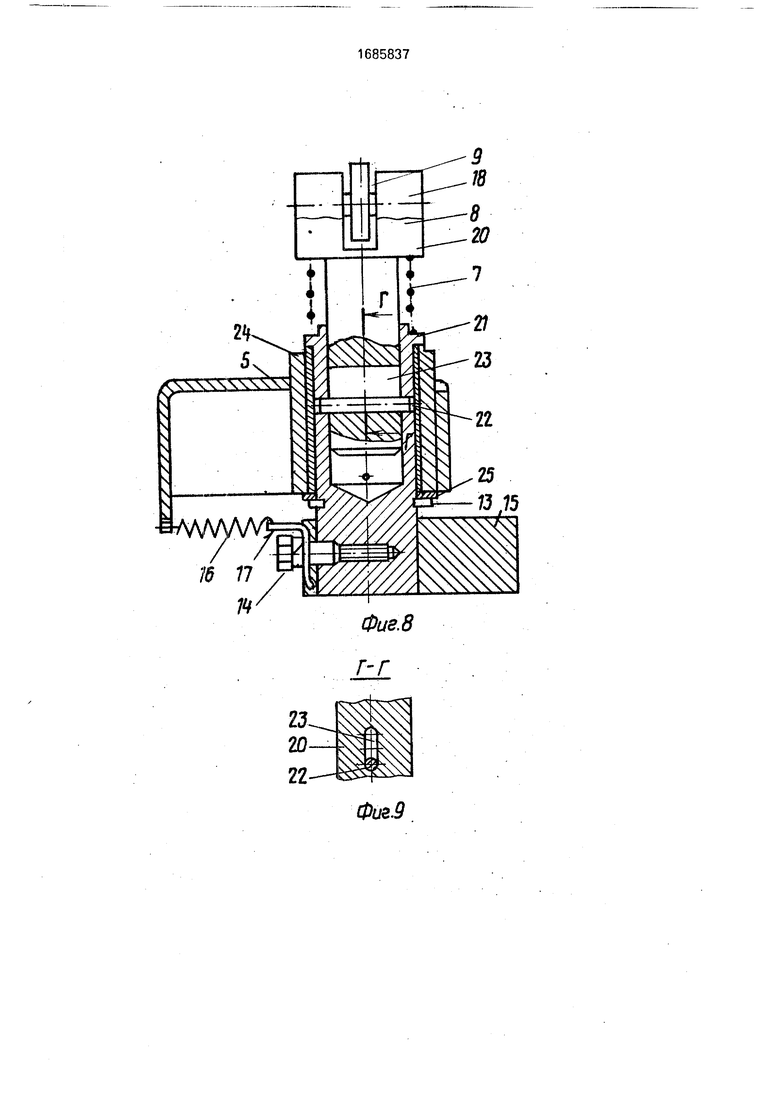
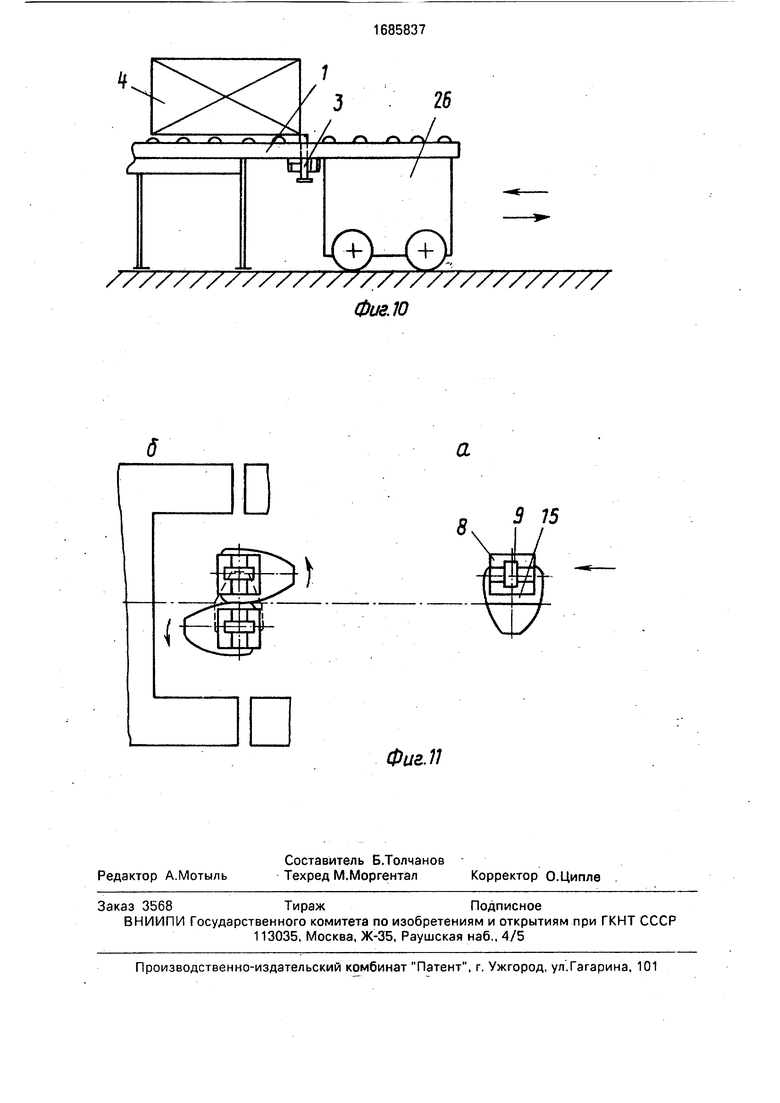
Целью изобретения является повышение технологичности и надежности работы. На фиг.1 изображено устройство для передачи штучных грузов; на фиг.2 - вид А на фиг.1; на фиг.З - концевой ограничитель груза, разрез; на фиг,4 - разрез Б - Б на фиг. 1;фиг.5- схема работы концевых ограничителей груза, установленных на роликовом конвейере и поворотной секции;на фиг,6 - концевой ограничитель груза, выполненный с пружиной, установленной под острым углом к оси стержня; на фиг.7 - вид В на фиг.6; на фиг.8 - концевой ограничитель груза, выполненный в виде двух соос- ных валов; на фиг,9 - сечение Г - Г на фиг.8; на фиг.10- устройство для перемещения и передачи штучных грузов, выполненное в еиде роликового конвейера и подвижной тележки на колесах; на фиг.11 -схема работы концевых ограничителей груза, установленных на роликовом конвейере и подвижной тележке на колесах.
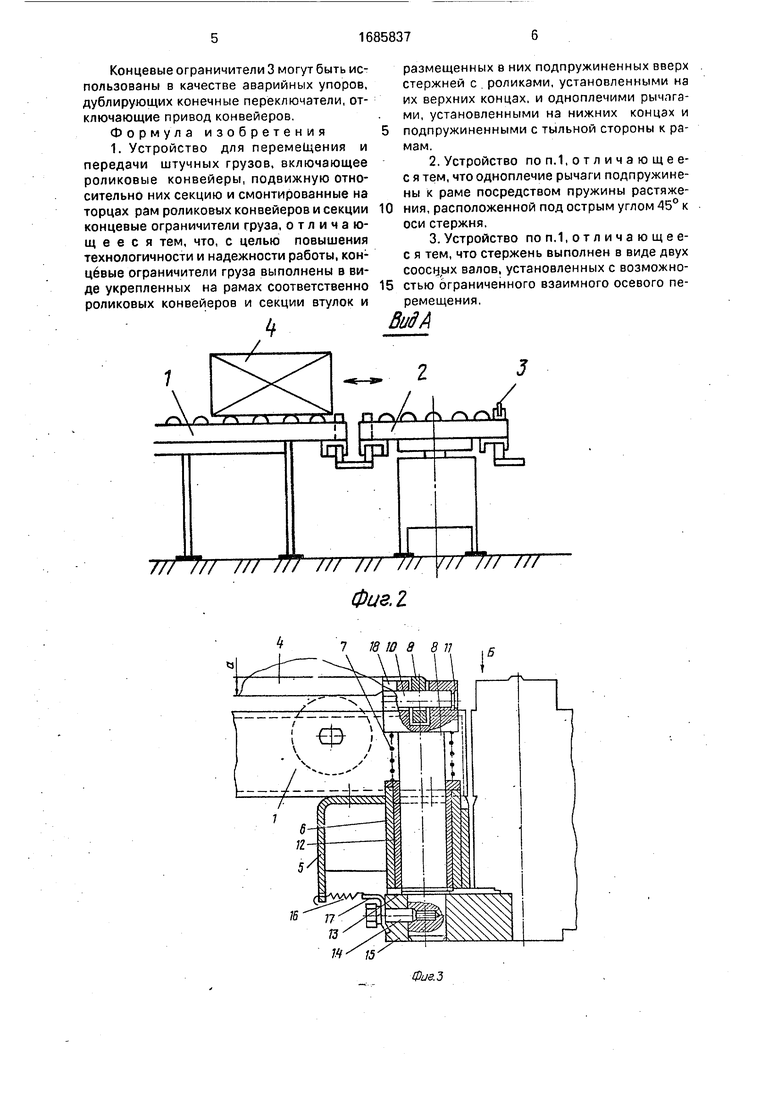
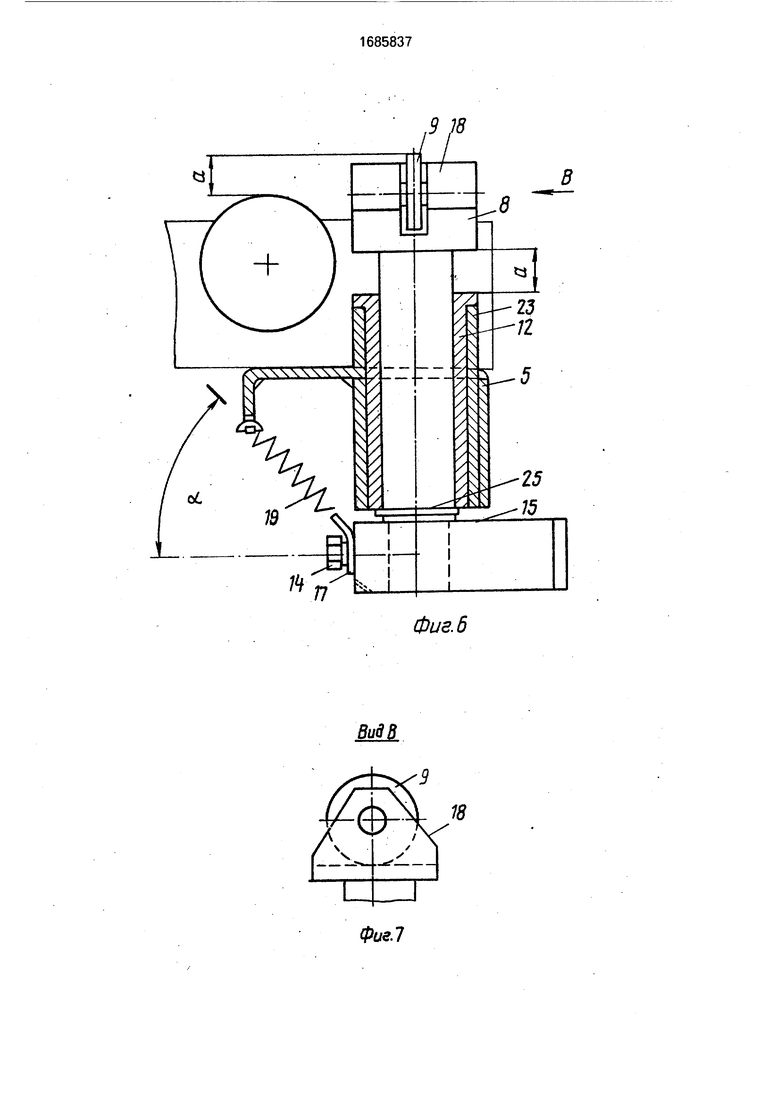
Устройство для перемещения и передачи штучных грузов состоит из роликовых конвейеров 1, установленных вокруг подвижной тележки , выполненной в виде поворотной секции 2 роликового конвейера. На торцах роликовых конвейеров 1 и с обеих сторон поворотной секции 2 на ее торцах установлены концевые ограничители 3 груза 4 (фиг.1 и 2), каждый из которых состоит из укрепленной на раме 5 направляющей втулки 6 с размещенным в ней подпружиненным пружиной 7, стержнем 8 с роликом 9, установленным на оси 10, которая зафиксирована в стержне 8 при помощи стопорных колец 11. Во втулку 6 запрессована гильза 12, выполненная из антифрикционного материала. Стопорное кольцо 13 установлено на стержне 8 с целью ограничения его перемещения вдоль оси. На нижнем конце 8 укреплен при помощи болта 14 одноплечий рычаг 15, удерживаемый пружиной 16, соединяющей раму 5 с фигурной шайбой 17, закрепленную на рычаге 15 при помощи болта 14. Концевой ограничитель 3 выполнен со скосами 18 так, что ролик 9 расположен выше плоскости транспортирования роликового конвейера 1 и поворотной секции 2 на величину а (фиг.З). Концевой ограничитель 3 можно выполнить с одной пружиной 19, установленной под острым углом коси стержня 8(а 45°)и соединяющей тыльную сторону рычага 15 с рамой 5 (фиг.6). Кроме того, концевой ограничитель 3 можно выполнить со стержнем 8, состоящим из двух соосных валов 20 и 21, ограниченное взаимное продольное перемещение которых обеспечивается за счет штифта 27, укрепленного в валу 21 и проходящего
сквозь паз 23. Для облегчения вращения вала 21 втулка 24 снабжена шайбой 25, выполненной из антифрикционного материала (фиг.8 и 9).
При выполнении подвижной тележки 26
0 с установкой на колесах (фиг.10 и 11) концевые ограничители 3 устанавливаются со смещением относительно друг друга в направлении, перпендикулярном продольной оси роликового конвейера 1 и подвижной
5 тележки 26.
Устройство работает следующим образом.
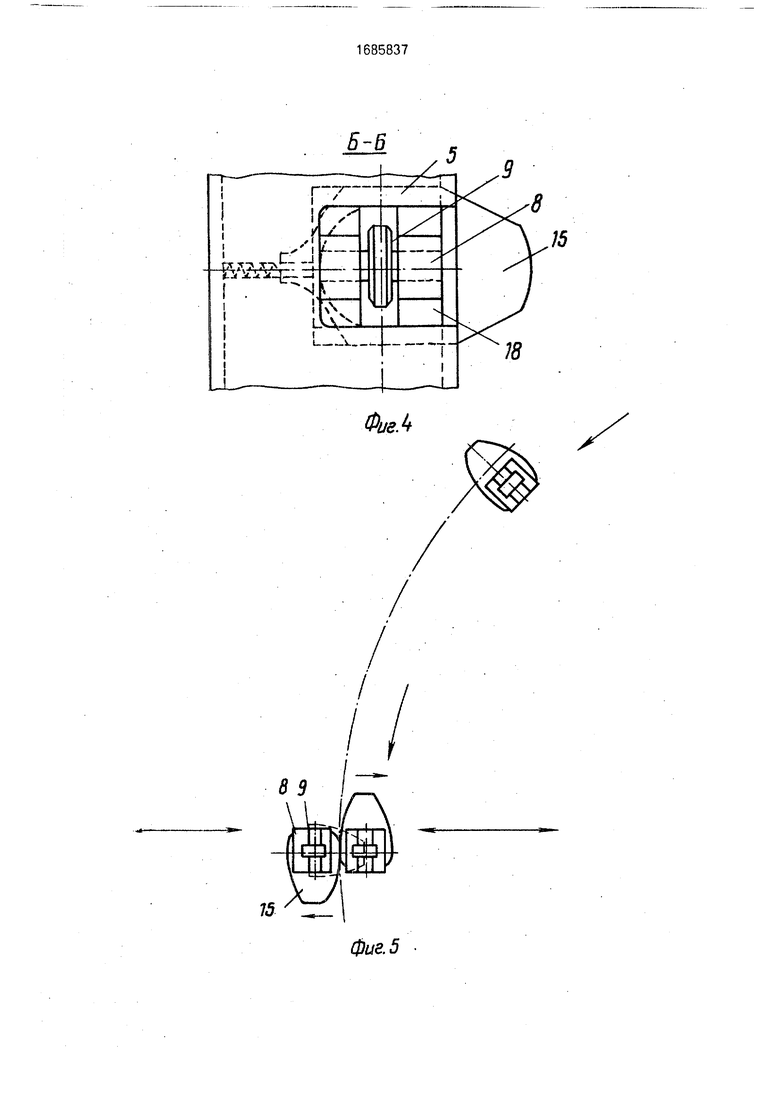
При повороте секции 2 до совпадения их продольных осей с роликовым конвейе0 ром 1 поворотная секция останавливается и фиксируется в этом положении, Концевые ограничители 3 при этом своими рычагами 15 входят во взаимодействие, при этом оы- чаги 15 поворачиваются на 90° каждый в
5 свою сторону (фиг.5). Ролики 9 располагаются вдоль общей оси роликового конвейера 1 и поворотной секции 2, При включении их приводов (не показаны) груз 4 перемещается на приводную секцию 2 (или обратно).
0 Принтом стержни 3 под воздействием груза 4, преодолевая сопротивление пружины 19 (фиг.6)„проседают до упора, и груз 4 беспрепятственно перемещается с роликового конвейера 1 на поворотную секцию 2
5 (или обратно). Величину проседания можно выбрать равной а, ролик 9 при этом выполняет функции неприводного ролика конвейера (фиг.6). При последующем повороте секции 2 концевые ограничители 3 вы0 ходят из взаимодействия, пружина 16 (фиг. 3) или прижина 19 (фиг.6) возвращает рыча- п ги 15 в исходное положение, ролики 9 пово- рачиваются перпендикулярно осям конвейера 1 и поворотной секции 2. Груз 4
5 упирается при этом в стержень 8, а концевые ограничители 3 удерживают груз 4 на повороте и предохраняют роликовые конвейеры 1 от перемещения груза 4 в сторону поворотной секции 2.
0 Выполнение концевого ограничителя 3 со стержнем в виде двух соосных валов 20 и 21 позволяет не иметь взаимных вертикальных перемещений рычагов 15 в момент перемещения груза 4, когда один концевой
5 ограничитель 3 просел, а второй еще нет.. В случае выполнения подвижной тележки 26, установленной на колеса, взаимодействие концевых ограничителей 3 происходит аналогичным, как и при пово- потной секции, образом (фиг.10).
Концевые ограничители 3 могут быть использованы в качестве аварийных упоров, дублирующих конечные переключатели, отключающие привод конвейеров
Формула изобретения 1. Устройство для перемещения и передачи штучных грузов, включающее роликовые конвейеры, подвижную относительно них секцию и смонтированные на торцах рам роликовых конвейеров и секции концевые ограничители груза, отличающееся тем, что, с целью повышения технологичности и надежности работы, концевые ограничители груза выполнены в виде укрепленных на рамах соответственно роликовых конвейеров и секции втулок и
76
W 5
размещенных в них подпружиненных вверх стержней с роликами, установленными на их верхних концах, и одноплечими рычлга- ми, установленными на нижних концах и подпружиненными с тыльной стороны к рамам.
ВидА
Фиг. 2
Ю Ю S 8 11
89
/
ФигМ
фиг. 5
Фиг. 6
Вид В
Фиг. 7
Фиг.9
У
26
L
Фие. Ю
9 75
Фиг.11
| Устройство для передачи штучных грузов | 1988 |
|
SU1602829A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для передачи штучных грузов | 1984 |
|
SU1199725A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
