Изобретение относится к лесопильно- деревообрабатывающей промышленности и может быть использовано на ленточно- пильных станках для распиловки бревен и брусьев, на {фуглопильных станках, фрезер- но-брусующих и фрезерно-обрезных станках и линиях при производстве шпалопродук- ции,
Целью изобретения является повышение точности позиционирования и увеличения полезного выхода материала путем установки рабочего органа с рациональным припуском на усушку древесины.
На фиг. 1 представлена гидравлическая схема предлагаемого устройства, применительно к условиям установки двух отслеживающих гидроцилиндров; на фиг. 2 - электрическая схема выдачи команд на настройку механизма с тоебу мым припуском на усушку; на фиг. 3 - гидгзавлическая схема подключения гидропозиционера.
Устройство содержит рабочие органы - механизм резания, который установлен на подвижном суппорте 2, жестко закрепленном с отслеживающими гидроцилиндрами 3 для установки суппорта, штоки 4,жестко закрепленные относительно станины станка, корректирующий гидроцилиндр 5 для установки на суппорте со штоком 6, Корпус гед- роцилиндра 5 жестко закреплен на суппорте 2
Устройство содержит также гидроппзи- ционер 7 со штоком 8 который соединен со штоком б гидрО Дилипдра 5 трубопровод 9, реверсивные золотники 10 открывающий или закрывающий саобсдный перелив жидкости из левой в правую полости гидроцилиндра 3, трехпозиционные четырехлмнеСн ые электрогидрораспре/зелигсли 11 золотника, обеспечивающие перелив жидкости из гад- роцилиндров 3 npw закрытых золотниках 10 в гидроцилиндр 5, либо отключающие цилиндр 5 (азглушающ&ю правую и левую полости гидроцилиндра Ь)
На фиг. 2 приняты следующие обозначения: Ki - кнопка включения механизма с припуском на усушку, равной а+ 2 /3 6% по условиям примера а материалах заявки; Ка - с припуском на усушку, равной «+/ 5%; Кз - с припуском на усушку а 4%; К4 - усушка а-(3 3%; Кз - с. припуском на усушку a- 2j3 - 2%. В схеме предусмотрены полупроводниковые диоды и замыкающие контакты реле Р 11, Р 11 -Р 16, электрсмагни- товЭМ11-ЭМ1б реверсивных золотников 10 и 11.
Схема подключения г/дропозиционзра (фиг.З) включает гидропозиционер7, шток 8, дроссель 17, двухпозиционный гидрораспределитель 18, манометр 19, золотник включения манометра 20, реле 21 давления, линию 22 слива, предохранительный клапан 23, бак 24, фильтр 25, насос 26, фильтр 27
пластинчатый, линию 28 напорную,
Устройство работает следующим образом.
Пример 1. По условиям распиловки оператор считает целесообразным принять
припуск на усушку равный 4%. Для обеспечения этих условий оператор на пульте управления нажимает кнопку 3 При этом срабатывают замыкающие контакты Р 13, Р 15 и Р 11, реверсивных золотников 10 и 11.
В результате этого золотники 10 занимают положение, обеспечивающее возможность свободного прямого перехода жидкости из левой в правую (и в обратном направлении) полостей гидроцилиндра 3, а реверсивные
золотники 11 исключают выход жидкости из правой и левой полостей гидроцилиндра 5 и отключают его от гидроцилиндров 3. Станок i готов к работе с намеченным 4%-ным припуском. Далее оператор подает команду в
систему управления гидропозиционера на требуемый номинальный размер выпиливаемой доски по известной системе, в результате которой срабатывает гидропозиционер 7 и его шток 8 а с ним л UJTOK б переместится
на величину (1+0,01 а). В связи стем, что выход жидкости из левого и правого гидроци- адндров 5 при данной настройке исключается, т о, следовательно, вместе с поршнем 6 nepei- ЩЗРТСЯ и корпус гидроцилиндра 5, а так
как корпус гидроцилиндра 5 жестко закреплен нэ подвижном суппорте 2, то и суппорт 2, а с ним и ПРЛЬНЫЙ блок 1 перемещаются на ве- гичичу (,01 а,
Пример 2 усповиям распиловки
следует принять процент припуска ча усушку . Оператор для обеспечения этих условий нажимает на пульте управления кнопку 4. При этом срабатывают замыкающие контакты Р 15 и Р 11. В результате этого
один золотник 10 занимает положение, исключающее переход жидкости из левой полости в правую полос гь гидроцилиндров 3, т.е. первый золотник 10 закрыт, а второй золотник 10 открыт, обеспечивая свободный переход из левой в правую полости второго гидроцилиндра 3. Один золотник 11 закрыт и препятствует перемещению жидкости из гидроцилиндра 3 в гидроцилиндр 5. Второй реверсивный золотник 11 занял положение,
обеспечивающее соединение левой полости тод- роцилиндра Зс левой полостью тодроцилиндра 5, правую полость гидроцилиндра 3 с правой полостью гидроцилиндра 5. Станок готов к работе с припуском на усушку (о:-/3) 3%.
Пример 3. По условиям распиловки следует принять процент припуска на усушку /Sl) (4+1) 5%.
Для обеспечения этих условий оператор на пульте управления нажимает кнопку К2. При этом срабатывают замыкающие контакты Р 15 и Р 14. В результате этого золотник
10закрыт, т.е. исключает переход жидкости из левой полости в правую полость гидроцилиндра 3, а второй золотник 10 открыт, обеспечивая свободный переход из левой в правую полости гидроцилиндра 3. Второй золотник 11 закрыт и препятствует перемещению жидкости из второго гидроцилиндра 3 в гидроцилиндр 5. Реверсивный золотник
11принял положение, обеспечивающее соединение левой полости первого гидроцилиндра 3 с правой полостью гидроцилиндра 5, а правую полость гидроцилиндра 3 с левой полостью гидроцилиндра 5. Далее оператор в соответствии со схемой подает команду в систему управления гидропозиционером 7 на требуемый номинальный размер выпиливаемой доски. В результате этого шток 8, а с ним и шток 6 перемещаются на величину (- 0,01 а). Под действием поршня на штоке 6 жидкость из гидроцилиндра 5 стремится перейти в гидроцилиндр 3, но так как оба гидроцилиндра 3 и 5 жестко закреплены на суппорте 2, а второй гидроцилиндр 3 влияния в данном случае не оказывает, так как он отключен от гидроцилиндра 5, а жидкость из левой полости свободно переходит в правую полость второго гидроцилиндра 3, второй золотник 10 открыт, то жидкость из левой полости гидроцилиндра 5, переходя влравую полость гидроцилиндра 3, будет смещать цилиндр 3, а вместе с ним и суппорт -2 влево При этом гидроцилиндр 5, жестко закрепленный на суппорте 2, переместится влево Однако в силу того, что эффективные площади поршней приняты в соотношениях, указанных в материалезаяв ки и дополнительн ых материалах, то произойдет соответствующее смещение штока 6 вместе с его поршнем относительно гидроцилиндра 5 в сторону, совпадающее с основным перемещением. Таким образом, суппорт 2, а вместе с ним и механизм 1 резания переместятся на величину а + (а+ /3).
Пример 4 По условиям распиловки следует принять процент припуска на усуш- ку ( а + 2 /J) - 6% Для обеспечения этих условий оператор на пульте управления нажимает на кнопку ( а. + 2 /)Ki. При этом срабатывают замыкающие контакты Р 12, Р 14 и Р 16 В результате этого золотники 10 закрыты, т.е исключается свободный переход из левой в правую полости гидроцилиндров 3, а золотник 11 занимает положение, при котором левые полости гимроцилиндра 3 подключены к правой полости гидроцилиндров 5, а правые полости гидроцилиндров 3 5 соединены с левой полостью гидроцилиндра 5. Станок готов к работе с припуском на усушку (а+ 2$ 6%,
Пример 5. По условиям распиловки следует принять процент припуска на усуш0 ку ( а - 2 /3) 2%. Для обеспечения этих усповий оператор на пульте управления нажимает на кнопку ( а - 2 /) Ks. При этом срабатывают замыкающее контакты Р 11, Р 14 и Р 16. В результате этого золотники 10
5 закрыты, а золотники 11 занимают положения, обеспечивающие переход жидкости из левых полостей гидроцилиндров 3 в левую полость гидроцилиндра 5, а правые полости гидроцилиндров 3 сообщаются с правой по0 лостью гидроцилиндра 5, т.е. относительное смещение штока 6 в цилиндре 5 увеличилось в 2 раза по сравнению с примером 2 в силу работы уже двух отслеживающих гидроцилиндров 3 Станок готов к работе с при5 пуском на усушку с величиной (а - 2 /), в нашем конкретном примере с величиной, равной 2%.
Формула изобретения
1. Устройство для перемещения рабо0 чих органов, содержащее привод перемещения рабочего органа, выполненный в виде гидропозиционера, входы которого связаны с системой выдачи команд установки рабочего органа, отличающееся тем,
5 что, с целью повышения точности позиционирования и увеличения полезного выхода материала путем установки рабочего органа с рациональным припуском наусушкудревесины, оно снабжено по меньшей мере одним
0 корректирующим и одним отслеживающим гидроцилиндрами для установки на суппорте, одним трехпозиционным четырехлинейным электрогидрораспределителем и одним реверсивным золотником причем последний
5 включен между полостями отслеживающего гидроцилиндра, в первом положении трехпо- зиционного четырехлинейного электрораспределителя первая линия связана с третьей, вторая - с четверти в среднем положении
0 все линии разомкнуты, во втором первая линия сообщена с четвертой, а вторая - с третьей, кроме того первая и вторая линии подключены к полостям корректирующего, а третья и четвертая - к соответствующим по5 лостям отслеживающего гидроцилиндра для установки на суппорте, при этом шток гидроцилиндра связан со штоком корректирующего гидроцилиндра для установки на суппорте.
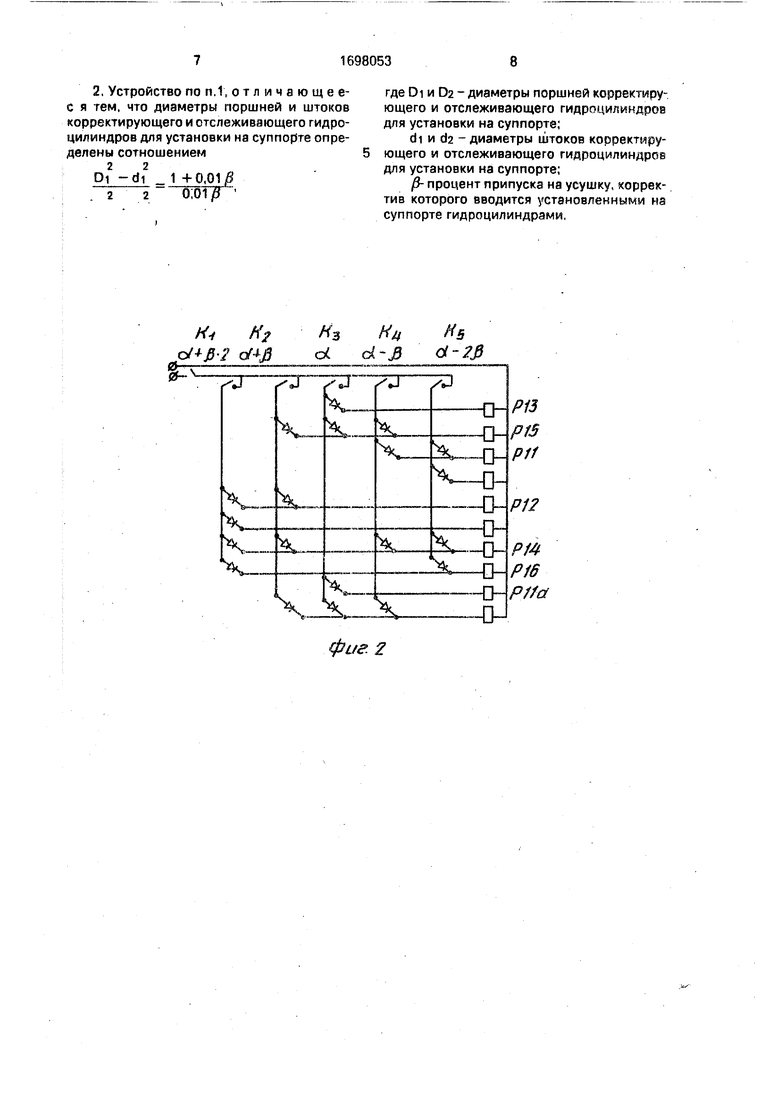
2. Устройство no n.1, о т л и ч а ю щ е е- с я тем, что диаметры поршней и штоков корректирующего и отслеживающего гидроцилиндров для установки на суппорте определены сотношением
2 2
Pi -di 1 +0.010 2 2 0,01 ft
где DI и D2 -диаметры поршней корректирующего и отслеживающего гидроцилиндров для установки на суппорте;
di и d2 - диаметры штоков корректирующего и отслеживающего гидроцилиндров для установки на суппорте;
ft- процент припуска на усушку, корректив которого вводится установленными на суппорте гидроцилиндрами,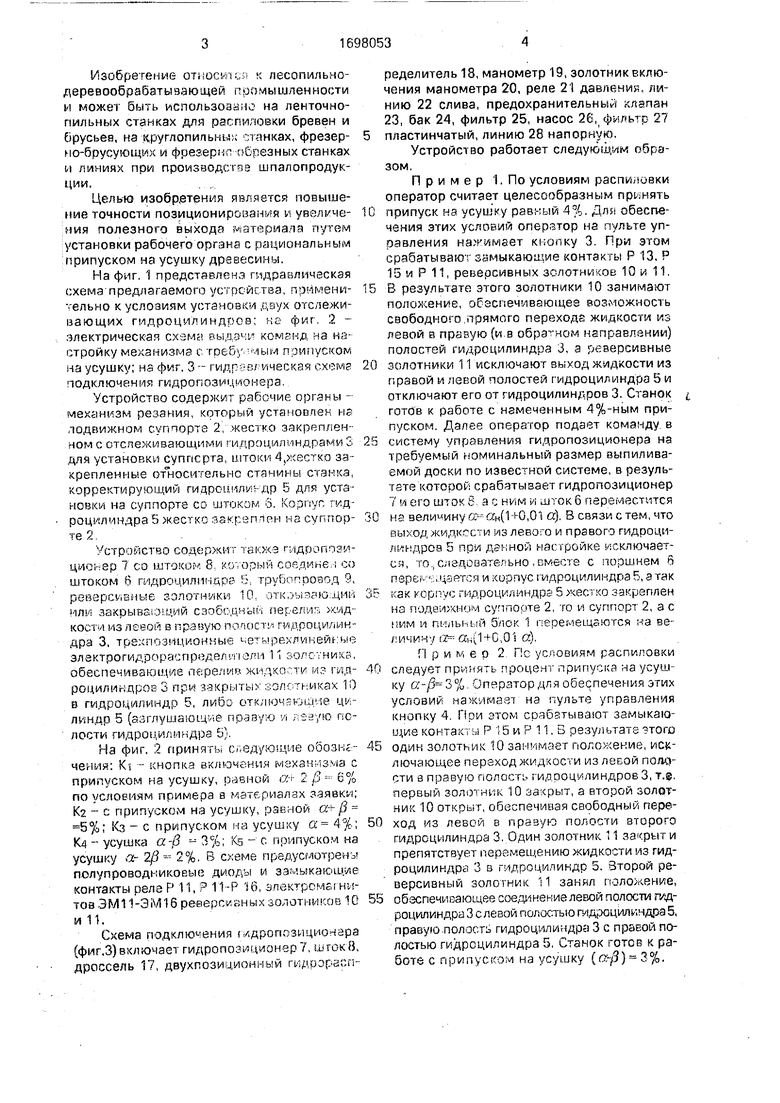

| название | год | авторы | номер документа |
|---|---|---|---|
| Круглопильный станок для продольной распиловки древесины | 1990 |
|
SU1720859A1 |
| Устройство для установки размеров | 1980 |
|
SU870114A1 |
| Гидрокопировальный многопроходный суппорт | 1981 |
|
SU1134350A1 |
| ТОРЦОВОЧНЫЙ СТАНОК | 1973 |
|
SU363585A1 |
| Позиционный привод рабочего органа деревообрабатывающего станка | 1985 |
|
SU1253776A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU307897A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ И УСТАНОВКИ ПИЛ | 1971 |
|
SU315594A1 |
| Гидрокопировальный фрезерный станок | 1978 |
|
SU768571A1 |
| Система автоматической коррекции положения и траектории движения копировального суппорта | 1975 |
|
SU543497A1 |
| УСТРОЙСТВО для ДИСКРЕТНОГО ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ | 1970 |
|
SU259345A1 |

Изобретение относится к лесопильно- деревообрабатывающей промышленности и может быть использовано на ленточнопильных станках для распиловки брусьев на кругло- пильных станках, фрезерно-брусующих и фре- зерно-обрезных станках и линиях при производстве шпалопродукции. Цель изобретения - повышение точности, позиционирования и 10 повышение полезного выхода материала путем установки рабочего органа с рациональным припуском на усушку древесины. Устройство для перемещения рабочих орга- нов содержит подвижный суппорт 2, на котором смонтирован пильный блок механизма резания 1, отслеживающий гидроциликдр 3 для установки на суппорте 2. Корректирующий гидроцилиндр 5 для установки на станине с штоком 6 также жестко установлен на суппорте 2. Трубопроводы 9 и реверсивные золотники 10(10) трехпозиционные четырех- лмнейные электрогидрораспределители 11 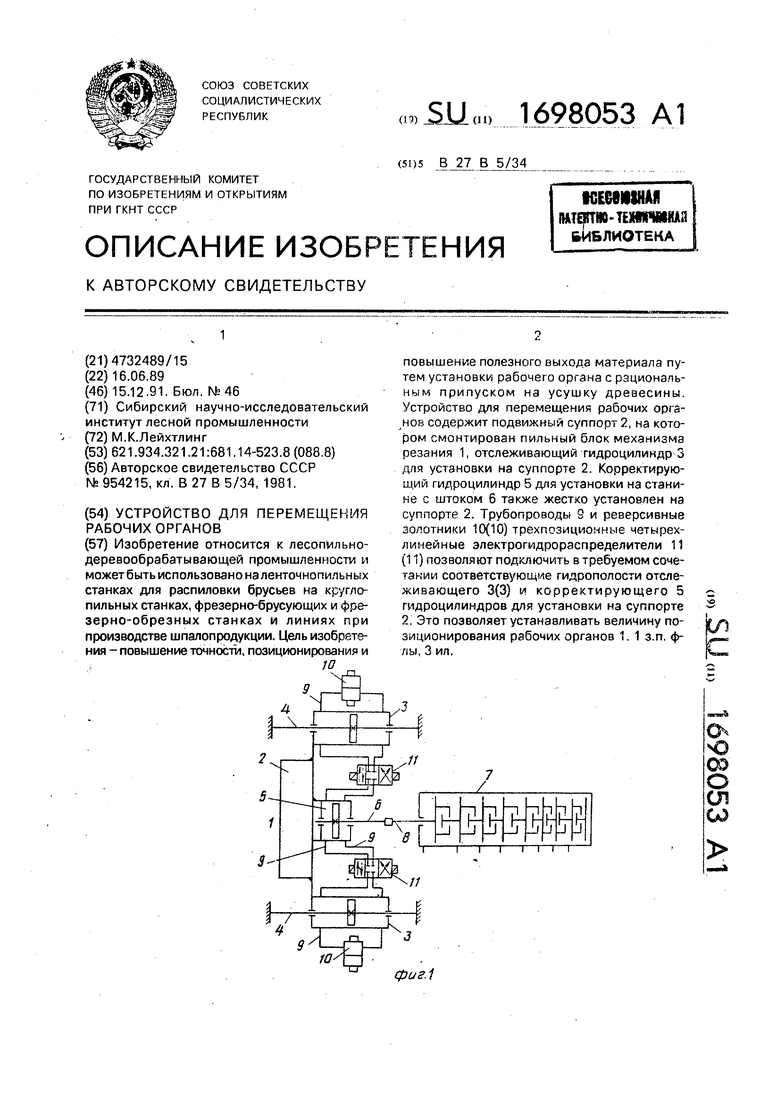
фиг. 2
| Устройство для дискретного позиционирования рабочих органов | 1981 |
|
SU954215A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
