Изобретение относится к автомобильному транспорту, а именно к транспортным средствам для перевозки груза, преимущественно животных.
Известно транспортное средство для перевозки скота, содержащее боковые борта, пол верхнего и нижнего ярусов, дверь- трап и наклонные направляющие в которых закреплен одним своим концом пол верхнего яруса (а.с. СССР № 1498650, В 60 Р 3/04).
Недостатком данного транспортного средства является обязательное наличие внешнего упора, посредством которого происходит разгрузка и погрузка верхнего яруса, что ограничивает применение прицепа специально оборудованными площадками.
Наиболее близким аналогичным техническим решением является транспортное средство, содержащее пол верхнего яруса с возможностью перемещения в вертикальных направляющих и тросовый подьемник с
приводом от двигателя автомобиля (патент США № 1573172, кл. В 60 Р 1/02, 1926).
Недостатком известного решения является необходимость в специальных фиксаторах при перевозке груза на верхнем ярусе, а также неравномерное вытягивание тросов при их изгибе и растяжении, что.при- водит к заклиниванию платформы подъемного яруса.
Цель изобретения - повышение надежности и улучшение условий эксплуатации транспортного средства для перевозки груза.
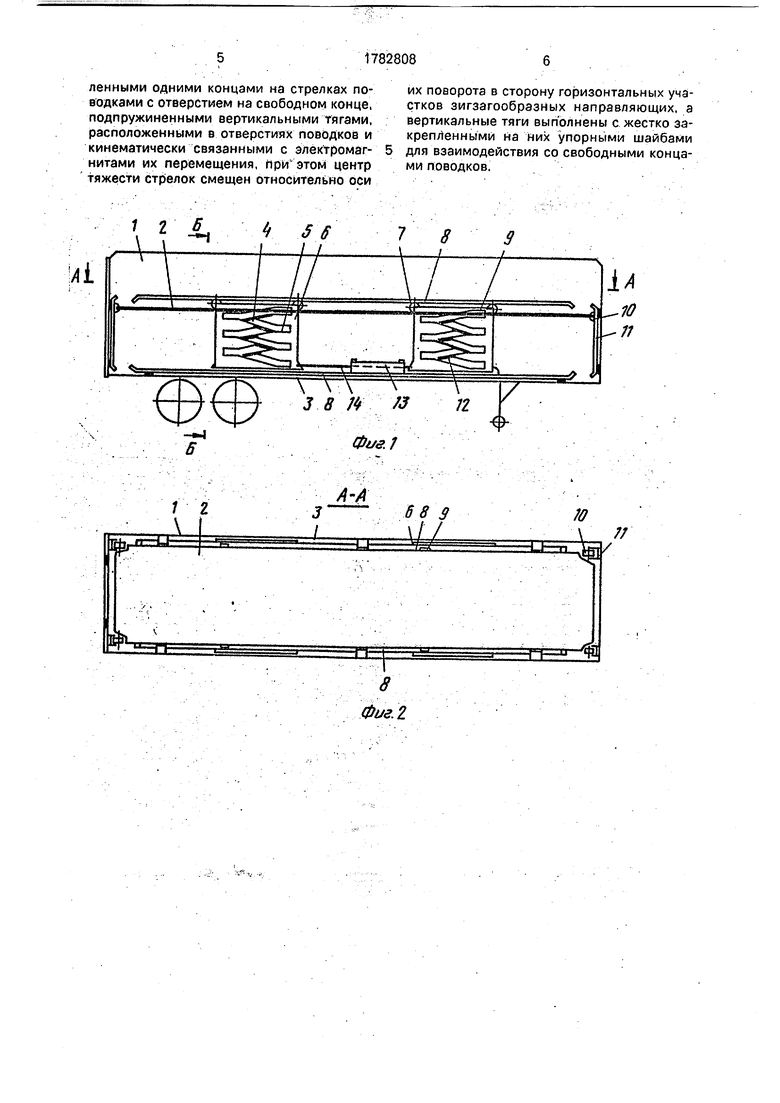
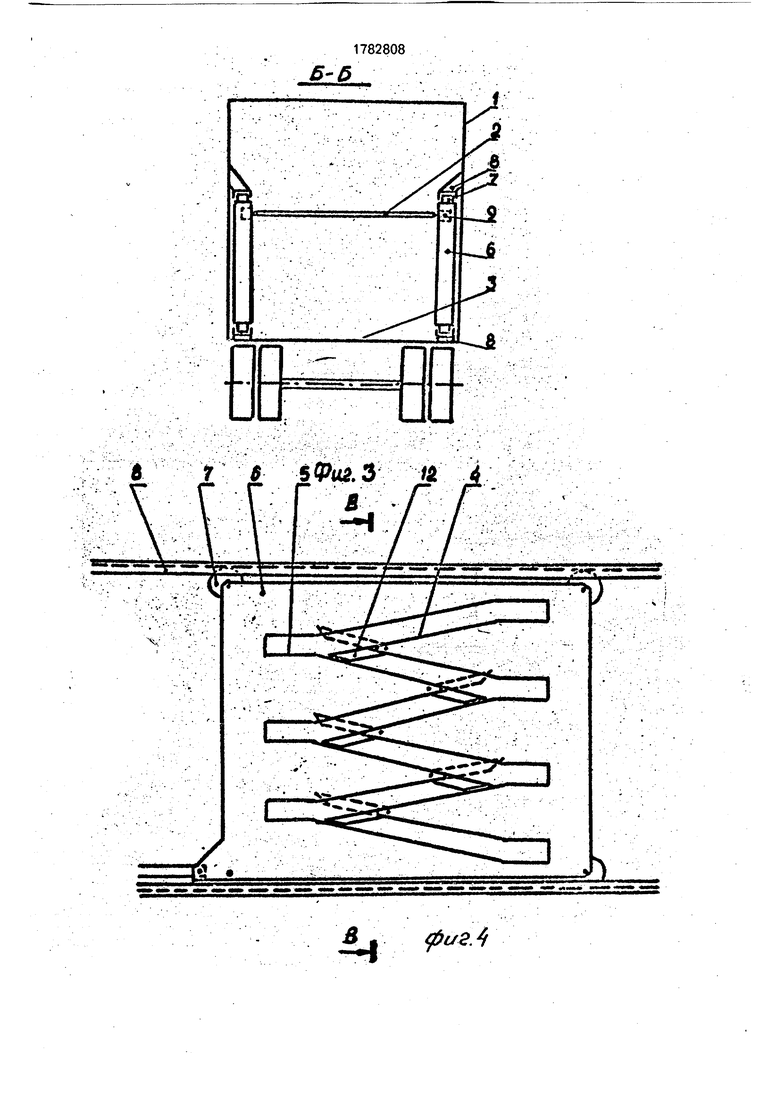
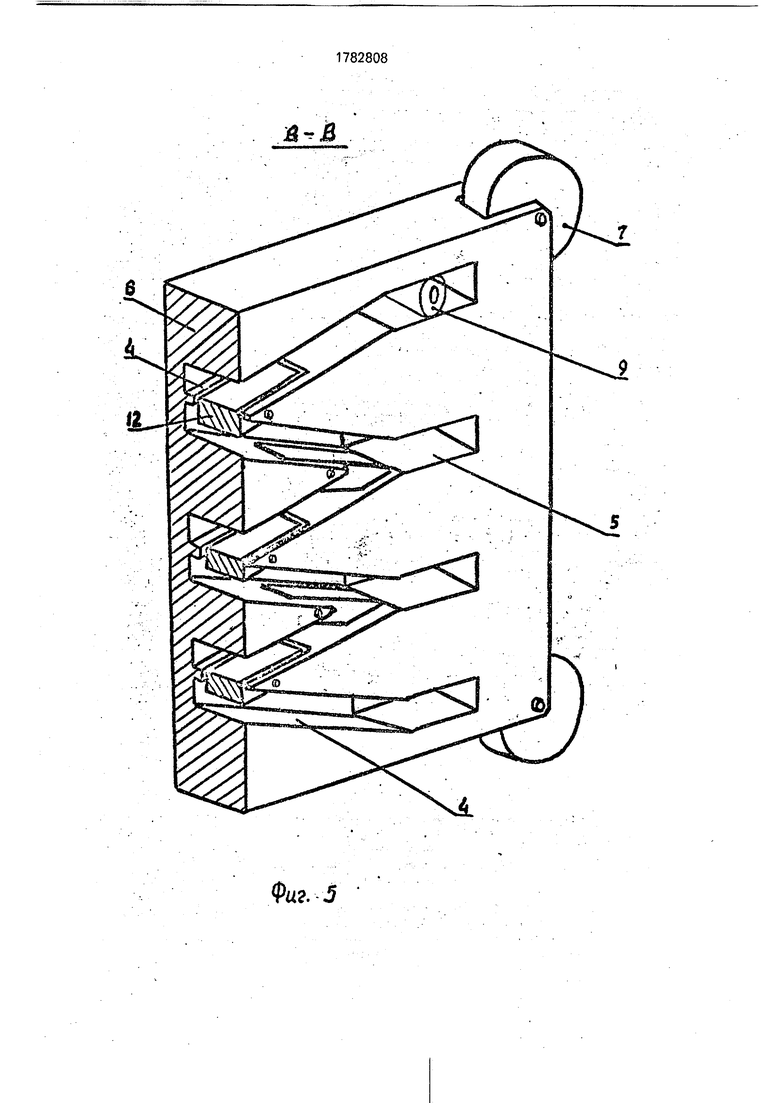
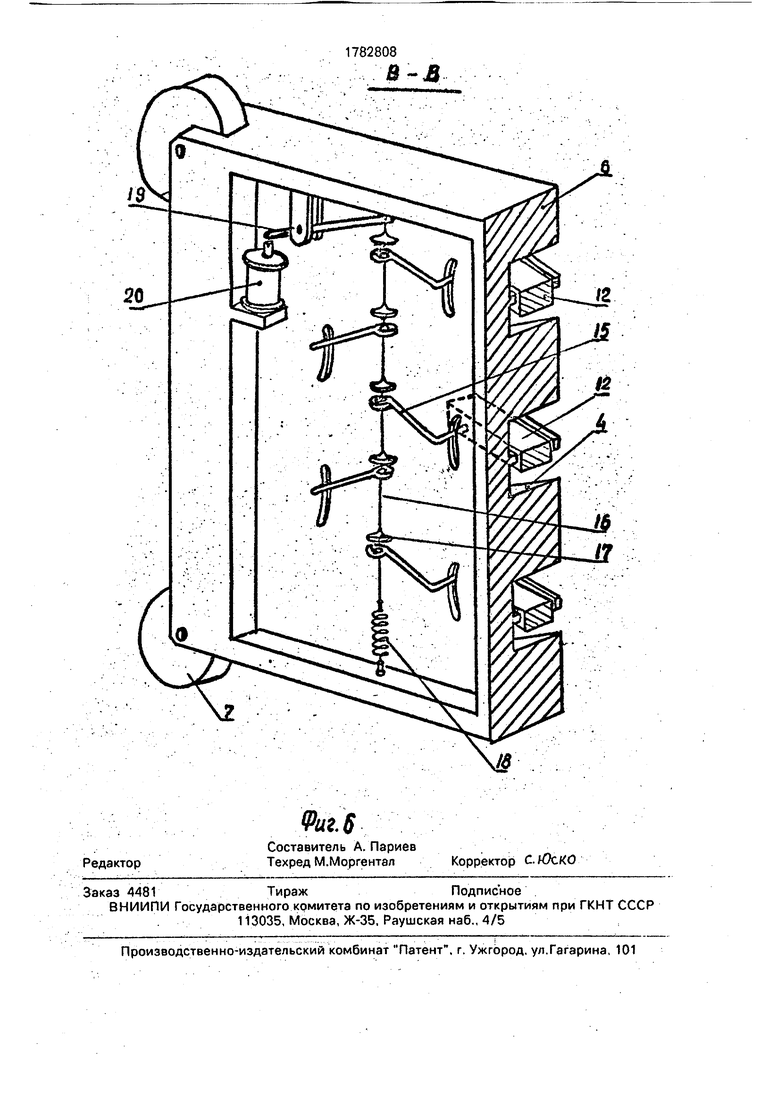
На фиг.1 изображено транспортное средство, вид сбоку, на фиг.2 - то же, вид сверху, разрез А-А; на фиг.З - вид с торца транспортного средства, разрез Б-Б; на фиг.4 - подвижная спора; на фиг.5 и 6 - то же, аксонометрия, разрез Д-Д.
Транспортное средство для перевозки груза содержит кузов с жестко закрепленСО
С
vi
00
ю
00
о
00
ными бортами 1, пол верхнего яруса 2 и пол нижнего яруса 3. Привод перемещения пола верхнего яруса 2 выполнен следующим образом. Пол верхнего яруса 2 установлен в зигзагообразных направляющих 4. с расположенными в местах изменения направления горизонтальными тупиковыми участками 5, причем зигзагообразные направляющие А с горизонтальными участками 5 выполнены в подвижных опорах б, расположенными у боковых бортов 1. Опоры качения 7 подвижных опор 6 размещены в горизонтальных направляющих 8 на боковых бортах 1 кузова. Пол верхнего яруса 2 опирается на зигзагообразные направляющие 4 с участками 5 посредством роликов 9, закрепленных на боковых поверхностях пола верхнего яруса. Кроме того пол верхнего яруса 2 посредством опор качения 10, размещенных в вертикальных направляющих 11, закрепленных с внутренней стороны торцевых бортов кузова, имеет возможность вертикального перемещения. В местахизменениянаправлениязигзагообразных направляющих 4 шарнир- но закреплены управляемые стрелки 12, центр тяжести которых смещен относительно шарнира к горизонтальному участку 5. Подвижные опоры 6 установлены попарно и соединены между собой неподвижным гидроцилиндром двухстороннего действия 13 со штоком 14. закрепленным к подвижным опорам.
Механизм управления стрелками 11 выполнен в виде жестко закрепленных одними концами на стрелках 11 поводков 15сотверстием на свободном конце, сквозь которое проходит подпружиненная вертикальная тяга 16. Натяге 16 жестко закреплены упорные шайбы 17 для взаимодействия со свободными концами поводков 15, а сама тяга 16 закреплена нижним концом к пружине 18, а верхним - к коромыслу 19 с электромагнитом 20.
Транспортное средство работает следующим образом После выгрузки груза (животных) с нижнего яруса 3, включаются гидроцилиндры 13, которые приводят в возвратно-поступательное движение подвижные опоры 6, перемещающиеся в горизонтальных направляющих 8. При перемещении опор 6 ролик 9 верхнего яруса 2 перекатывается по зигзагообразным направляющим 4, горизонтальным участкам 5 и стрелками 12 вниз, в результате чего происходит опускание яруса 2 по вертикальным направляющим 11. В этой позиции сердечник электромагнита 20 не втянут и пружина 18 посредством тяги 16 с шайбами 17, нажимающих на поводки 15 приводит стрелки 12
в наклонное положение, при котором они подняты вверх (на фиг.4 обозначены пунктиром). Ролик 9, перемещаясь по зигзагообразной направляющей 4 опускает стрелку
12 в нижнее положение и по ней вкатывается на горизонтальный участок 5, освобождая стрелку 12, которая посредством тяги 16 занимает прежнее (приподнятое) положение. После этого производится переключе0 ние гидроцилиндра 13 на обратный ход и процесс повторяется. После разгрузки верхнего яруса 2, происходит аналогичное перемещение роликов 9 в подвижных опорах 6, при котором сердечник электромагнита
5 20 втянут, а шайбы 17 подняты тягой 15 вверх, в результате чего стрелки 12 опущены вниз, с опорой на направляющие 4, ролик 9 перемещаясь по направляющей 4, поднимает стрелку 12, которая после вкаты0 вания ролика 9 на горизонтальный участок 5, занимает прежнее положение 4, после чего производится переключение гидроцилиндра на обратный ход. Опора 9 накатывается на стрелку 12 и далее перемещается
5 вверх по направляющей 4, После подъема верхнего яруса 2 на требуемую высоту производится загрузка (животными) нижнего яруса 3.
Использование данного транспортного
0 средства позволит значительно увеличить эффективность его использования. Формула изобретения
1.Транспортное средство для перевозки груза, преимущественно скота, содержа5 щее кузов с жестко закрепленными торцевыми и боковыми бортами, полом нижнего яруса и полом верхнего яруса, установленным с возможностью перемещения по вертикальным направляющим
0 приводом и фиксации в требуемом положении, отличающееся тем. что, с целью повышения надежности и улучшения условий эксплуатации, привод образован подвижными опорами, установленными
5 попарно посредством горизонтальных направляющих на боковых бортах кузова, и гидроцилиндрами двустороннего действия, закрепленными неподвижно и соединенными своими штоками с подвижными опорами
0 каждой пары, при этом в подвижных опорах выполнены зигзагообразные направляющие с расположенными в местах изменения направления горизонтальными тупиковыми участками и управляемыми стрелками, а на
5 боковых поверхностях пола верхнего яруса закреплены ролики, расположенные в зигзагообразных направляющих.
2.Транспортное средство по п. 1, о т л ичающееся тем, что механизм управления стрелками выполнен с жестко закрепленными одними концами на стрелках поводками с отверстием на свободном конце, подпружиненными вертикальными тягами, расположенными в отверстиях поводков и кинематически связанными с электромагнитами их перемещения, при этом центр тяжести стрелок смещен относительно оси
их поворота в сторону горизонтальных участков зигзагообразных направляющих, а вертикальные тяги выполнены с жестко закрепленными на них упорными шайбами для взаимодействия со свободными концами поводков.

| название | год | авторы | номер документа |
|---|---|---|---|
| Кузов самосвального транспортного средства для перевозки легковесного груза | 1986 |
|
SU1324888A1 |
| Кузов самосвального транспортного средства для перевозки легковесного груза | 1986 |
|
SU1324889A1 |
| Самосвальное транспортное средство | 1986 |
|
SU1353679A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ЛЕГКОВЕСНЫХ ДЕФОРМИРУЕМЫХ ГРУЗОВ | 1991 |
|
RU2017633C1 |
| Транспортное средство для перевозки легковесных грузов | 1990 |
|
SU1785927A1 |
| Самосвальное транспортное средство | 1987 |
|
SU1505805A1 |
| Самосвальное транспортное средство | 1989 |
|
SU1641669A1 |
| Самосвальное транспортное средство для перевозки легковесных грузов | 1989 |
|
SU1675135A1 |
| Самосвальный кузов транспортного средства для перевозки легковесных грузов | 1981 |
|
SU965828A2 |
| Кузов транспортного средства для перевозки легковесных грузов | 1983 |
|
SU1142323A1 |
Изобретение относится к автомобильному транспорту, а именно к транспортным средствам для перевозки груза, преимущественно животных. Кузов имеет жестко закрепленные торцевые и боковые борта, пол нижнего яруса. Пол верхнего яруса установлен с возможностью перемещения по вертикальным направляющим приводом. Привод образован подвижными опорами, установленными попарно посредством горизонтальных направляющих на боковых бортах кузова, и гидроцилиндрами двустороннего действия, закрепленными неподвижно и соединенными своими штоками с подвижными опорами каждой пары. В подвижных опорах выполнены зигзагообразные направляющие с горизонтальными тупиковыми участками и управляемыми стрелками. 1 з.п. ф-лы, 6 ил.
J 8 Я Я
Фыг.1
П
)8Фиг. 2.
Б-&
Г л
В
ри$.4
Фиг.-5
| Способ определения физико-механических свойств и напряженного состояния массива горных пород | 1988 |
|
SU1573172A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
