Изобретение относится к робототехн- ке и может быть использовано для механизации и автоматизации операций в различных отраслях промышленности, а также в условиях складских помещений для захвата изделий преимущественно неправильной формы, в частности мешков, рулонов и т.п.
Целью данного изобретения является расширение технологических возможностей.
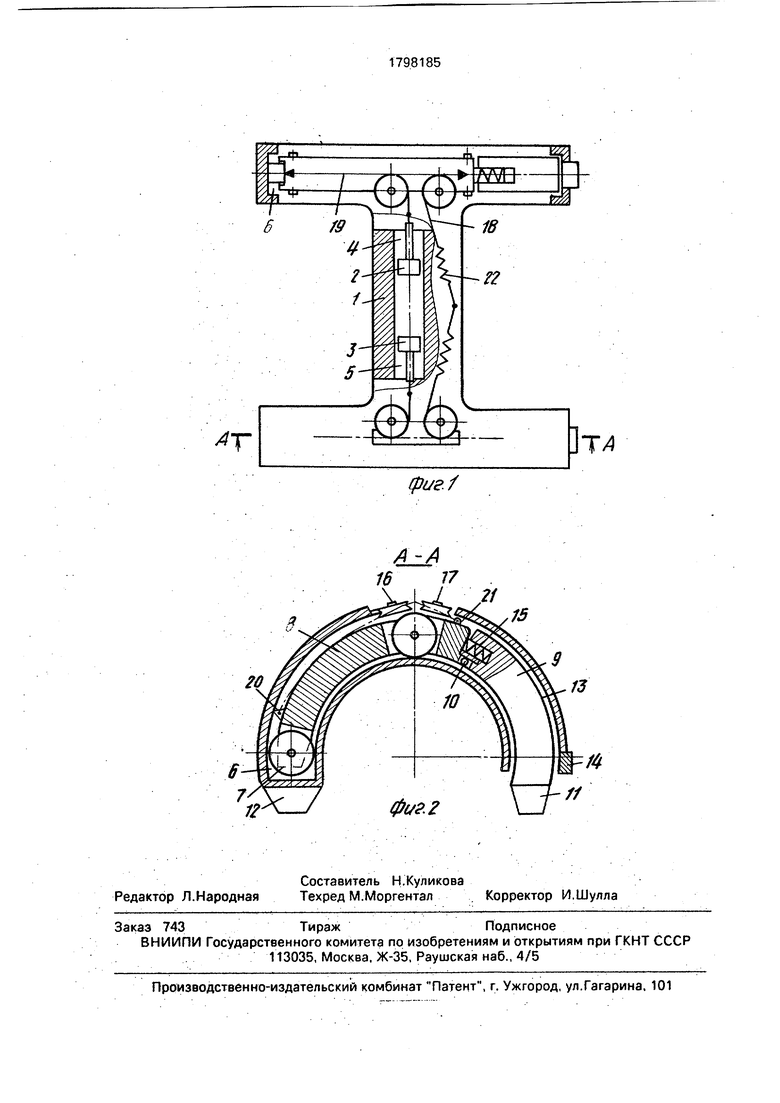
На фиг.1 изображена схема схвэта в виде сверху при раскрытых губках; на фиг,2 - разрез А-А на фиг.1; на фиг.З - то же, при закрытых губках схвата.
Схват состоит из корпуса 1, внутри которого встроен пневкоцилиндр с поршнями 2 и 3 и рабочими полостями 4 и 5,
На боковых поверхностях корпуса 1 имеются криволинейные направляющие б, внутри которых на роликах 7 перемещается подхватывающий элемент, выполненный из двух частей в виде секторов 8 и 9, соединенных шарниром 10, захватная губка 11 закреплена на секторе 9. Такая же губка 12 размещена на торце направляющей б. Сектор 9 имеет поверхность трения 13, а направляющая 6 имеет тормозную колодку 14.
Пружина сжатия 15. помещенная между секторами 8 и 9 обеспечивает отжатие сектора 9 от колодки 14. На направляющей 6 установлены блоки 16 и 17, через которые проходят две пары тяговых органов 18 и 19. Одна пара тросов 18 закреплена соответственно к секторам 8 в точках 20 и 21, а концы тросов 18 связаны пружиной растяжения 22, Другая пара тросов связана с поршнями 2 и 3 пневмоцилиндра и с секторами 9.
Схват работает следующим образом.
После накладывания его на поднимаемый рулон или мешок сжатый воздух подается в полости 4 и 5 пневмоцилиндра. При этом поршни 2, втягиваясь, обеспечивают выдвижение секторов 8 и 9 вместе с губками 11, которые частично охватывают поднимаемый груз, зажимая его между губками 11 и 12.
При этом наличие двух поршней 2 и 3 обеспечивает независимость охвата груза левым и правым захватным органом. При подъеме груза (см.фиг.З) под действием его 5 веса происходит поворот секторов 9, прижатие их поверхности 13 к колодке 14, что затрудняет движение сектора 8 относительно направляющей б, а следовательно, раскрытие схвата.
0 После укладки груза на место с сектора 9 снимается усилие веса груза, под действием пружины 15 поверхность 13 отжимается от колодки 14 и после стравливания воздуха из полостей 4 и 5 под действием пружины 22
5 сектора 8 и 9 перемещаются в исходное положение, освобождая груз.
Таким образом, предложенная конструкция позволяет захватывать детали любой формы, в том числе и неправильной
0 из-за независимой работы губок, при зтом осуществляется надежный захват груза и исключается раскрытие губок под действием груза за счет самоторможения держателей от веса груза.
5 Формула изобретения
Схват, содержащий корпус, две лары зажимных губок, одна из которых в каждой ларе выполнена в виде подхватывающего элемента, установлена с возможностью ле0 ремещения в криволинейных направляющих корпуса и связана гибкой связью с одной стороны с корпусом, а с другой стороны - с приводом, отличающийся тем, что, с целью расширения технологических
5 возможностей, подхватывающий элеме выполнен составным из двух частей, шар- нирно связанных и подпружиненных одна относительно другой, при этом часть, несущая губку, имеет на своей поверхности, об0 ращенной к направляющей, поверхность трения, а направляющая на внутренней поверхности у свободного торца снабжена тормозной колодкой для взаимодействия с поверхностью трения губки, кроме того,
5 привод выполнен в виде силового цилиндра с двумя установленными в нем поршнями, каждый из которых связан со своим подхватывающим элементом.
(риг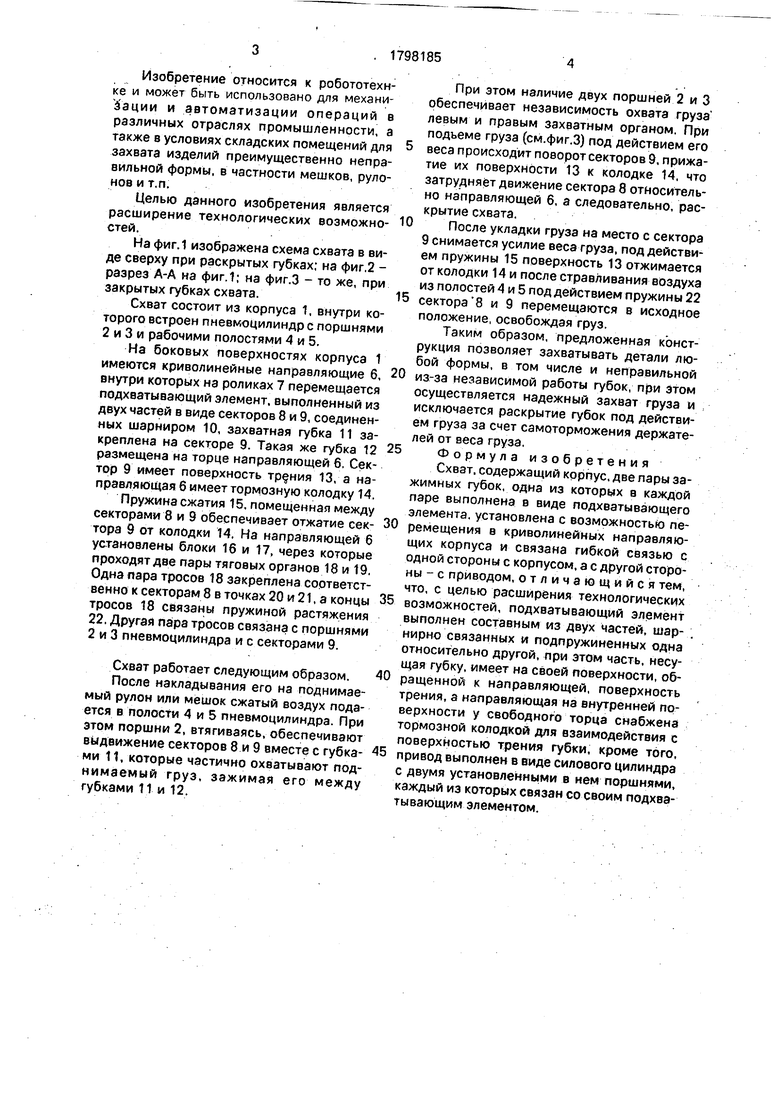
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1981 |
|
SU952581A1 |
| Схват манипулятора | 1983 |
|
SU1166988A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1131648A1 |
| Захватное устройство | 1986 |
|
SU1373567A1 |
Использование: в робототехнике, для механизации и автоматизации операций захвата в условиях складских помещений. Сущность изобретения: схват позволяет повысить надёжность работы и расширить технологические возможности. Схват имеет пару направляющих 6, выполненных по форме отрезка кольца, на одном торце каждого из которых размещена губка 12, а другая губка 11 выполнена в виде подхватывающего элемента, установленного с возможностью перемещения в криволинейных направляющих. Подхватывающий элемент выполнен из двух щарнирно связанных и подпружиненных частей 8 и 9. При этом часть 9 имеет обращенную к направляющей поверхность трения 13, а направляющая 6 имеет тормозную колодку 14. При подъеме под действием веса груза происходит поворот части 9 и прижатие поверхности 13 к колодке 14. 3 ил.
| Захватное устройство | 1984 |
|
SU1191282A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
