Изобретение относится к способам контроля параметров устройств, осуществляющих линейные преобразования сигналов, к способам генерации тестирующих входных данных, а также к способам испытания и контроля элементов систем управления. Изобретение может быть использовано при разработке систем функционального контроля элементов систем управления.
В современной теории и практике проектирования и анализа систем управления используется понятие анизотропии возмущения входных сигналов, поступающих на вход линейной системы. Анизотропия n-мерного случайного сигнала характеризует информационное уклонение Кульбака-Лейблера данного сигнала от случайного сигнала с гауссовским распределением вероятностей, имеющего скалярную ковариационную матрицу. При этом часто имеет место ситуация, когда для данной линейной системы А без памяти [Месарович М, Такахара Я. Общая теория систем: математические основы, М.: «Мир», 1978, стр.41, определение 3.5], которая функционирует в составе более крупной системы В, известна оценка сверху анизотропии входного n-мерного случайного сигнала, поступающего на вход системы А. В этом случае для правильного функционирования указанной более крупной системы необходимо В, чтобы линейная система А правильно функционировала по крайней мере на соответствующих наборах входных сигналов, которые характеризуются заданным уровнем анизотропии. Тем самым актуальной является задача тестирования работоспособности системы А на случайных последовательностях входных сигналов, характеризующихся заданным уровнем анизотропии.
В общем случае линейная система А без памяти реализует линейный оператор LA, переводящий входные сигналы x∈Rm в выходные сигналы y=LAx∈Rp, причем относительно внутренней структуры системы А может быть ничего не известно, т.е. систему А можно рассматривать как черный ящик. Физически система А может быть выполнена как на цифровой базе, так и на базе аналоговых элементов. Возможные неисправности в системе А могут приводить к тому, что вместо того чтобы реализовывать номинальный оператор LA, система начинает реализовывать другой реальный оператор L'A=LA+ΔLA. Причиной этого могут быть как выходы из строя дискретных элементов, так и систематический дрейф параметров аналоговых элементов системы А. Если система А не обладает собственной системой самотестирования, то система В должна обладать средствами подачи на входы системы А таких входных воздействий, которые соответствовали бы рабочим входным воздействиям при работе системы А в составе системы В, и средствами анализа значений выходных сигналов на выходах системы А при таких входных воздействиях, позволяющими делать заключения о степени работоспособности системы А.
В качестве критерия работоспособности системы А может использоваться малость отличия a-анизотропийной нормы реального оператора L'A от а-анизотропийной нормы номинального оператора LA, где а - некоторое положительное число, являющееся оценкой сверху анизотропии входных сигналов, поступающих на вход системы А при ее функционировании в составе системы В. Согласно [Владимиров И.Г, Даймонд Ф, Клоеден П. Анизотропийный анализ робастного качества нестационарных дискретных систем на конечном временном интервале // http://www.math.uni-frankfurt.de/~numerik/kloeden/Article/ait_paper_final.pdf] понятие а-анизотропийной нормы оператора определяется следующим образом. Ниже через Е обозначается математическое ожидания случайной величины.
Для любого λ>0 обозначим через pm,λ гауссовскую плотность на Rm с нулевым средним и скалярной ковариационной матрицей λIm, где Im - единичная матрица порядка m, т.е.

Обозначим через  класс Rm-значных квадратично интегрируемых случайных векторов, распределенных абсолютно непрерывно относительно m-мерной лебеговой меры mesm. Для любого
класс Rm-значных квадратично интегрируемых случайных векторов, распределенных абсолютно непрерывно относительно m-мерной лебеговой меры mesm. Для любого  с плотностью распределения вероятностей f:Rm→R+ относительно mesm его относительная энтропия относительно (1) принимает вид
с плотностью распределения вероятностей f:Rm→R+ относительно mesm его относительная энтропия относительно (1) принимает вид

где  - дифференциальная энтропия случайного вектора W в смысле лебеговой меры mesm. Определим анизотропию A(W) случайного вектора как минимальное информационное уклонение его распределения от гауссовских распределений на Rm с нулевым средним и скалярными ковариационными матрицами. Непосредственное вычисление показывает, что минимум в (2) по всевозможным λ>0 достигается при λ=E|W|2/m и, следовательно,
- дифференциальная энтропия случайного вектора W в смысле лебеговой меры mesm. Определим анизотропию A(W) случайного вектора как минимальное информационное уклонение его распределения от гауссовских распределений на Rm с нулевым средним и скалярными ковариационными матрицами. Непосредственное вычисление показывает, что минимум в (2) по всевозможным λ>0 достигается при λ=E|W|2/m и, следовательно,

Пусть F∈Rp×m - произвольная фиксированная матрица. Среднеквадратичный коэффициент усиления оператора F по отношению к W определяется как
Для любого фиксированного функция Q(F, W) задает норму на Rp×m. В случае произвольного а≥0 значение а-анизотропийной нормы матрицы F определяется как

Таким образом возникает задача контроля значения а-анизотропийной нормы линейной системы без памяти с m входами и p выходами, где а - заданное положительное число, путем подачи на вход системы тестовых сигналов и определения среднеквадратичного значения коэффициента усиления системы на указанных тестовых сигналах.
Естественный способ контроля а-анизотропийной нормы линейной системы, реализующей линейный оператор F, состоит в непосредственном использовании определения (3) среднеквадратичного коэффициента усиления оператора F по отношению к W путем оценивания математических ожиданий методом Монте-Карло, используя подачу на входы линейной системы случайных сигналов с заданным уровнем анизотропии а. Недостатком этого способа является то, что получаемый результат является только статистической оценкой а-анизотропийной нормы, причем для получения приемлемого уровня точности и достоверности число входных воздействий должно быть достаточно большим и является неограниченным при приближении длины доверительного интервала к нулю. Хуже всего то, что получаемое случайное значение оценки может оказаться больше истинного значения a-анизотропийной нормы, т.е. оно не обеспечивает надежного получения даже оценки снизу для а-анизотропийной нормы. Кроме того, в случае, когда реальный оператор, реализуемый системой, неизвестен, для получения достоверного значения а-анизотропийной нормы необходимо производить определение значений Q(F, W) для достаточно большого множества распределений случайных сигналов W с уровнем анизотропии а, что приводит к очень высокой трудоемкости этого способа.
В вышеуказанной работе Владимирова И.Г. и соавт. предложен способ контроля значения а-анизотропийной нормы линейной системы без памяти с m входами и p выходами, в случае, если матрица F линейной системы известна. В этом случае возможно явное определение ковариационной матрицы случайного вектора с анизотропией, равной а, на котором достигается верхняя грань (4). Недостатком этого способа является то, что он неприменим в случае, когда матрица F линейной системы неизвестна.
С учетом изложенного актуальной является разработка способа контроля значения а-анизотропийной нормы линейной системы без памяти с n входами и m выходами, где а - заданное положительное число, путем подачи на вход системы тестовых сигналов и определения среднеквадратичного значения коэффициента усиления системы на указанных тестовых сигналах, при котором для оценки снизу а-анизотропийной нормы указанной системы используется детерминированная последовательность входных сигналов, длина которой была бы ограничена. Кроме того, актуальной является задача нахождения такой детерминированной последовательности сигналов в случае, когда точное значение матрицы указанной линейной системы неизвестно.
Предлагаемый способ контроля значения а-анизотропийной нормы линейной системы без памяти с m входами и p выходами, где а - заданное положительное число, путем подачи на вход системы n наборов тестовых сигналов, где n≥m, и определения среднеквадратичного значения коэффициента усиления системы на указанных тестовых сигналах состоит в том, что последовательно подают на вход системы n наборов тестовых сигналов xi=(xi1, …, xim)T, 1≤i≤n, таких что матрица Х=(x1…xn), составленная из значений компонент указанных тестовых сигналов, является формирующей матрицей для m-мерной случайной гауссовской последовательности, анизотропия которой не превосходит указанного значения а. Определяют среднеквадратичное значение коэффициента усиления системы на указанных тестовых сигналах как квадратный корень из отношения суммы квадратов всех p компонент всех выходных сигналов, соответствующих всем n указанным входным сигналам, к сумме квадратов всех m компонент всех n указанных входных сигналов. Наконец, принимают полученное среднеквадратичное значение коэффициента усиления системы на указанных тестовых сигналах в качестве оценки снизу для указанного значения а-анизотропийной нормы линейной системы. При этом достигается технический результат, состоящий в надежном определении оценки снизу значения а-анизотропийной нормы линейной системы при помощи фиксированного числа входных сигналов.
Осуществление изобретения
Контроль значения а-анизотропийной нормы линейной системы А без памяти с m входами и p выходами, где а - заданное положительное число, производят путем подачи на вход системы тестовых сигналов и определения среднеквадратичного значения коэффициента усиления системы на указанных тестовых сигналах. Для этого на вход системы А последовательно подают n наборов тестовых сигналов xi=(xi1,…, xim)T, 1≤i≤n, где n≥m, таких что матрица X=(x1…xn), составленная из значений компонент указанных тестовых сигналов, является формирующей матрицей для m-мерной случайной гауссовской последовательности, анизотропия которой не превосходит указанного значения а. Это означает, что случайный вектор
где (ξ1, …, ξn) - совокупность независимых нормально распределенных (гауссовских) случайных величин, является случайным вектором, анизотропия которого не превосходит а. Согласно вышеуказанной работе Владимирова И.Г. и соавт. величина анизотропии такого случайного вектора равна
-
Таким образом, в качестве матрицы Х можно брать любую невырожденную матрицу размера m×n, для которой имеет место неравенство
-
При подаче на вход системы А тестового сигнала xi на выходе системы А возникает выходной сигнал yi=(yi1,…, yip)T=Axi. Для каждого такого выходного сигнала определяют значение квадрата нормы этого сигнала, равное сумме квадратов компонент этого сигнала:
 .
.
После этого определяют среднеквадратичное значение коэффициента усиления К системы А на тестовых сигналах (x1, …, xn) как квадратный корень из отношения суммы квадратов всех m компонент всех выходных сигналов, соответствующих всем n указанным входным сигналам, к сумме квадратов всех m компонент всех n указанных входных сигналов
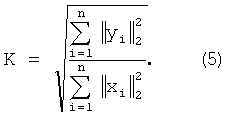
Полученное среднеквадратичное значение К коэффициента усиления системы на указанных тестовых сигналах в качестве оценки снизу для указанного значения а-анизотропийной нормы линейной системы.
Покажем, что изложенный способ корректно вычисляет оценку снизу для а-анизотропийной нормы линейной системы, т.е. что указанное значение К действительно является оценкой снизу для а-анизотропийной нормы линейной системы А будучи равным среднеквадратичному коэффициенту усиления оператора F, реализуемого системой А, по отношению к W согласно (3).
В самом деле, пусть (Fij)=(Aij) - матрица линейного оператора F. Тогда имеют место равенства
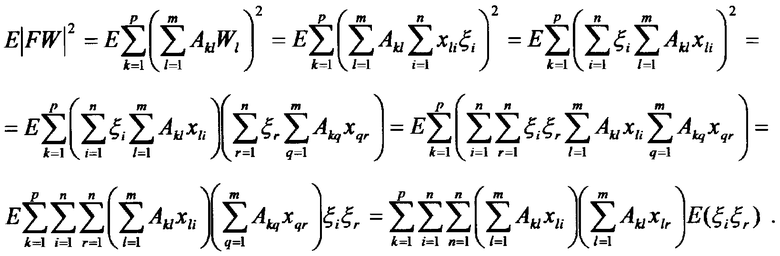
Поскольку ξi - независимые случайные величины с нулевым средним и единичной дисперсией, Е(ξiξr)=δir, где δir=1 при i=r и δir=0 при i≠r, откуда последняя пятикратная сумма равна

Аналогично проверяется, что
Следовательно, согласно (3) и (5)
что доказывает наше утверждение.
Заметим, что минимальное число n наборов тестовых сигналов, обеспечивающее выполнение условия det(XXT)≠0, равно m, что соответствует случаю классического формирующего фильтра для m-мерного случайного вектора. В принципе, возможны ситуации, когда из-за определенных конструктивных ограничений на вход линейной системы можно подавать только число наборов тестовых сигналов, кратное какому-либо значению, не являющемуся делителем числа m. В этом случае изложенный способ можно применять с произвольным числом n входных наборов сигналов, большим m. При отсутствии таких ограничений выбор n=m обеспечивает минимальный набор тестовых сигналов для контроля а-анизотропийной нормы линейной системы без памяти.
Изложенный способ контроля а-анизотропийной нормы линейной системы без памяти обеспечивает технический результат, состоящий в надежном определении оценки снизу значения а-анизотропийной нормы линейной системы при помощи фиксированного числа входных сигналов. При этом надежность обеспечивается за счет того, что совокупность входных сигналов является детерминированной, что исключает статистические ошибки, связанные с необходимостью учитывать распределения вероятностей входных сигналов и учитывать доверительные интервалы, связанные с обычным статистическим методом оценивания.
Из доказательства корректности изложенного способа следует, что значение среднего коэффициента усиления линейной системы без памяти на заданной совокупности наборов входных векторов зависит исключительно от ковариационной матрицы, получаемой как выборочная ковариационная матрица данной совокупности входных векторов. Тем самым набор компонент выборочной ковариационной матрицы является набором достаточных статистик для определения а-анизотропийной нормы линейной системы. Это говорит о том, что теория а-анизотропийной нормы является частью корреляционной теории и не нуждается в привлечении теоретико-информационных рассмотрений, как до сих пор считалось в анизотропийной теории линейных систем.
Изобретение относится к области испытания и контроля элементов систем управления, контроля параметров устройств, осуществляющих линейные преобразования сигналов, а также к генерации тестирующих входных данных. Техническим результатом является повышение надежности определения оценки снизу значения а-анизотропийной нормы линейной системы при помощи фиксированного числа входных сигналов. В способе контроля указанной нормы линейной системы без памяти с m входами и p выходами последовательно подают на вход системы n наборов тестовых сигналов, таких что матрица X=(x1…xn), составленная из значений компонент указанных тестовых сигналов, является формирующей матрицей для m-мерной случайной гауссовской последовательности, анизотропия которой не превосходит указанного значения а. Определяют среднеквадратичное значение коэффициента усиления системы как квадратный корень из отношения суммы квадратов всех p компонент всех выходных сигналов, соответствующих всем n указанным входным сигналам, к сумме квадратов всех m компонент всех n указанных входных сигналов. Принимают полученное среднеквадратичное значение коэффициента усиления системы на указанных тестовых сигналах в качестве оценки снизу для указанного значения а-анизотропийной нормы линейной системы и по величине этой оценки судят о допустимости значения a-анизотропийной нормы указанной линейной системы без памяти. 3 з.п. ф-лы
1. Способ контроля значения а-анизотропийной нормы линейной системы без памяти с m входами и p выходами, где а - заданное положительное число, путем подачи на вход системы n наборов тестовых сигналов, где n≥m, и определения среднеквадратичного значения коэффициента усиления системы на указанных тестовых сигналах, при котором:
последовательно подают на вход системы n наборов тестовых сигналов хi=(хi1, …, xim)т, 1≤i≤n, таких, что матрица X=(x1…xn), составленная из значений компонент указанных тестовых сигналов, является формирующей матрицей для m-мерной случайной гауссовской последовательности W, анизотропия которой не превосходит указанного значения а;
определяют среднеквадратичное значение коэффициента усиления системы на указанных тестовых сигналах как квадратный корень из отношения суммы квадратов всех m компонент всех выходных сигналов, соответствующих всем n указанным входным сигналам, к сумме квадратов всех m компонент всех n указанных входных сигналов;
принимают полученное среднеквадратичное значение коэффициента усиления системы на указанных тестовых сигналах в качестве оценки снизу для указанного значения а-анизотропийной нормы линейной системы, и по величине этой оценки судят о допустимости значения а-анизотропийной нормы указанной линейной системы без памяти.
2. Способ по п.1, в котором указанная матрица Х является произвольной матрицей, удовлетворяющей условию - 
3. Способ по п.1, в котором n=m.
4. Способ по п.1, в котором n>m.
| СПОСОБ ДИАГНОСТИРОВАНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2153188C1 |
| Устройство для счета штучных изделий | 1986 |
|
SU1399784A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНТЕНСИВНОСТИ РАДИАЦИОННОГО ИЗЛУЧЕНИЯ | 1989 |
|
SU1832949A1 |
| Автомат обандероливания картонных коробок | 1985 |
|
SU1391990A1 |
| Устройство непрерывного тестового диагностирования линейных динамических систем | 1981 |
|
SU983710A1 |
| Способ контроля технического состояния цифровых блоков | 1988 |
|
SU1552138A1 |

