Изобретение относится к области машиностроения преимущественно к автоматическим или полуавтоматическим токарным станкам для обработки без снятия колес, устанавливаемых под рельсовыми транспортными средствами.
Известно мобильное устройство для вращения колесной пары при механической обработке поверхности катания колес, содержащее основание, снабженное средством крепления к рельсу и размещенное на основании средство вращения, выполненное в виде электродвигателя, соединенного с ведущим роликом из эластичного неметаллического материала, закрепленным в опоре, связанной с механизмом поджатия ролика и средство управления (патент США US8186250 B2,05.29.2012, опубл. июль, 10, 2008 г., МПК В23В 5/28, US CI /82.1.11).
Данное техническое решение является наиболее близким к изобретению по технической сущности и достигаемому результату, поэтому принято за прототип.
К недостаткам конструкции следует отнести невысокое качество и увеличенные затраты времени на обработку поверхности катания колеса.
Технический результат от использования изобретения заключается в повышении качества и снижение времени профилирования за счет автоматической адаптации нагрузочных режимов мобильного привода с параметрами токарного профилирования поверхности катания колеса.
Ниже приведены общие и частные существенные признаки, характеризующие причинно-следственную связь изобретения с указанным техническим результатом.
Мобильное устройство для вращения колесной пары при механической обработке поверхности катания колес содержит основание, снабженное средством крепления к рельсу и, размещенный на основании сервопривод вращения ведущего ролика, выполненный в виде электродвигателя, корпус которого закреплен на одной боковине С-образной цапфы, а его ротор соединен с валом, установленным на подшипниках и, несущим жестко прикрепленный к нему ведущий ролик. Свободные концы боковин цапфы шарнирно прикреплены посредством осей к опорам, установленным на основании. К средней части цапфы прикреплена вилка, шарнирно соединенная с ходовой гайкой ШВП. Винт которой снабжен средством его вращения, управляемого блоком управления сервоприводом поджатия ведущего ролика. Блок управления сервоприводом поджатия ведущего ролика и блок управления сервоприводом вращения выполнены с возможностью адаптации с параметрами профилирования колеса на токарном станке с возможностью обеспечения постоянного усилия поджатия посредством адаптации блока ЧПУ привода ролика с блоком ЧПУ системы токарной обработки. Блок ЧПУ системы токарной обработки включает в себя: центральный контроллер управления, связанными с ним среду программирования, блок удаленного доступа и сервисной диагностики с возможностью выхода в глобальную сеть Internet для получения и передачи данных К среде программирования имеет доступ мобильное средство с возможностью автоматического чтения-записи данных на внутренний сервер с базой данных предприятия, центральный контроллер управления и, соединенная с ним операторская панель выбора типа профиля связаны с блоком ЧПУ привода ролика, который включает в себя блок управления сервоприводом поджатия ролика, связанный с базой данных безопасности, синхронизации осей и контроля поломок, и блок управления сервоприводом вращения ролика. Последний блок управления синхронизирован с блоком управления сервоприводом поджатия ведущего ролика. Блок управления сервоприводом вращения соединен с блоком входов/выходов цифровых и аналоговых сигналов. Сервопривод поджатия ролика может быть выполнен в виде электродвигателя или в виде гидропривода. Беговая дорожка ролика может быть выполнена из резины или выполнена с равномерно распределенными по ее поверхности наклонными насечками в сторону реборды R обрабатываемого колеса. Беговая дорожка ролика может быть выполнена из сжатого полиуретана. Ролик может быть выполнен металлическим.
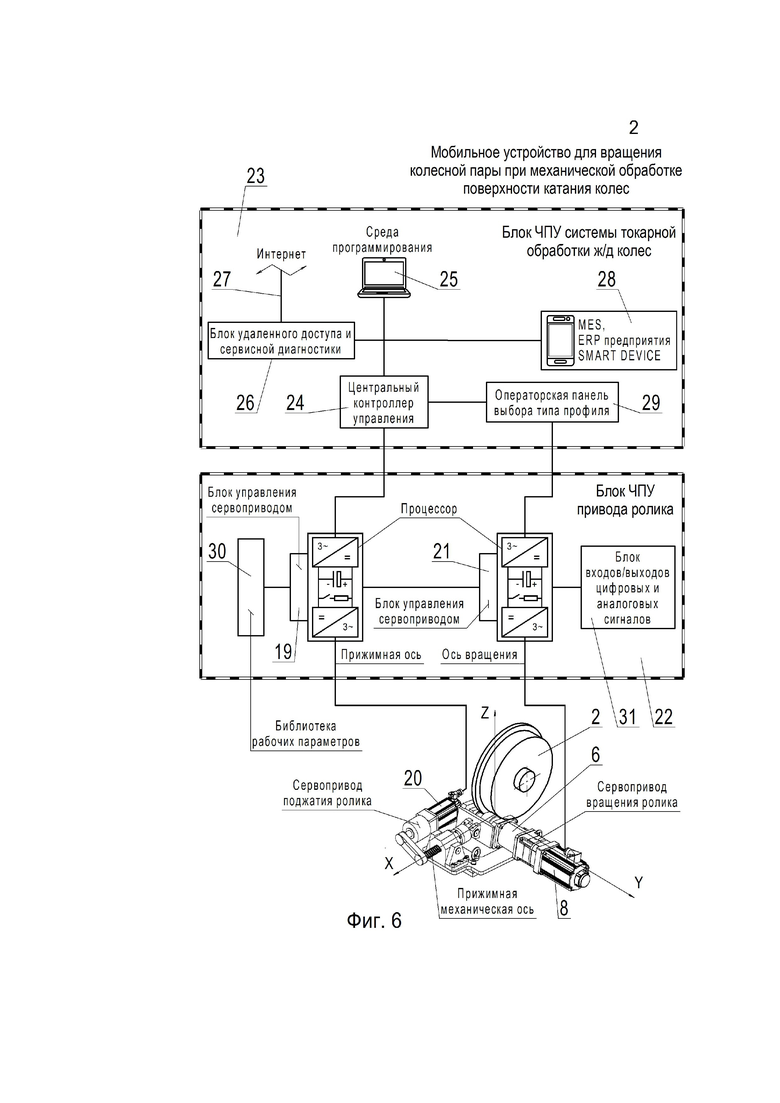
Устройство иллюстрируется чертежами, где: на фиг. 1 представлен вид сверху; на фиг. 2 - разрез Г-Г на фиг. 1; на фиг. 3 - разрез В-В на фиг. 1; на фиг. 4 - вид А на фиг. 1; на фиг. 5 - продольный разрез Б-Б на фиг. 1; на фиг. 6 - блок-схема управления мобильным устройством.
Мобильное устройство для вращения колесной пары 1 при механической обработке поверхности катания колес 2 содержит основание 3, снабженное средством крепления 4 к рельсу 5 и, размещенный на основании 3 сервопривод вращения 6 ведущего ролика 7, выполненный в виде электродвигателя 8, корпус которого закреплен на одной боковине С-образной цапфы 9, а его ротор соединен с валом 11, установленным на подшипниках 12 и, несущим жестко прикрепленный к нему ведущий ролик 7, а свободные концы боковин цапфы 9 шарнирно прикреплены посредством осей 13 к опорам 14, установленным на основании 3.
К средней части цапфы 9 прикреплена вилка 15, шарнирно соединенная с ходовой гайкой 16 ШВП, винт 17 которой снабжен средством его вращения 18, управляемого блоком управления 19 сервоприводом поджатия 20 ведущего ролика 7.
Блок управления 19 сервоприводом поджатия 20 ведущего ролика 7 и блок управления 21 сервоприводом вращения 6 выполнены с возможностью адаптации с парамерами профилирования колеса 2 на токарном станке с возможностью обеспечения постоянного усилия поджатия посредством адаптации блока ЧПУ привода 22 ролика с блоком ЧПУ системы токарной обработки 23.
Блок ЧПУ системы токарной обработки 23 включает в себя: центральный контроллер управления 24, связанными с ним среду программирования 25, блок удаленного доступа и сервисной диагностики 26 с возможностью выхода в глобальную сеть Internet 27 для получения и передачи данных, при этом к среде программирования 25 имеет доступ мобильное средство 28 с возможностью автоматического чтения-записи данных на внутренний сервер с базой данных предприятия, центральный контроллер управления 24 и, соединенная с ним операторская панель выбора типа профиля 29 связаны с блоком ЧПУ привода ролика 22, который включает в себя блок управления 19 сервоприводом поджатия 20 ролика 7, связанный с базой данных безопасности, синхронизации осей и контроля поломок 30, и блок управления 21 сервоприводом вращения 6 ролика 7, причем последний блок управления 21 синхронизирован с блоком управления 19 сервоприводом поджатия 20 ведущего ролика 7, причем блок управления 21 сервоприводом вращения 6 соединен с блоком входов/выходов цифровых и аналоговых сигналов 31.
Сервопривод поджатия 20 ролика 8 может быть выполнен в виде электродвигателя или в виде гидропривода.
Беговая дорожка ролика 7 может быть выполнена из резины или выполнена с равномерно распределенными по ее поверхности наклонными насечками в сторону реборды R обрабатываемого колеса.
Беговая дорожка ролика 7 может быть выполнена из сжатого полиуретана.
Сравнение заявленного технического решения с уровнем техники известным из научно-технической и патентной документации на дату приоритета в основной и смежной рубриках не выявило средство, которому присущи признаки, идентичные всем признакам, содержащимся в предложенной заявителем формуле изобретения, включая характеристику назначения.
Т.е., совокупность существенных признаков заявленного решения ранее не была известна и не тождественна каким-либо известным техническим решениям, следовательно, оно соответствует условию патентоспособности "новизна".
Данное техническое решение промышленно применимо, поскольку в описании к заявке и названии изобретения указано его назначение, оно может быть осуществлено промышленным способом патент, осуществимо и воспроизводимо, а отличительные признаки, приведенные в формуле изобретения позволяют получить новый технический результат, т.е. являются существенными.
Изобретение в том виде, как оно охарактеризовано в формуле, может быть осуществлено с помощью средств и методов, описанных в источнике «Механизированная установка устранения остроконечного наката гребня колесных пар без выкатки из-под вагона - исполнение 3», ставшим общедоступным до даты приоритета изобретения.
Следовательно, заявленное техническое решение соответствует условию патентоспособности "промышленная применимость".
Анализ известных технических решений в данной области техники показал, что предложенное техническое решение не следует для специалиста явным образом из уровня техники, поскольку не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками, а в выявленных таких решениях не подтверждена известность влияния отличительных признаков на указанный в материалах заявки технический результат.
Т.е. заявленное решение имеет признаки, которые отсутствуют в известных технических решениях, а использование этих признаков в заявленной совокупности существенных признаков дает возможность получить новый технический результат: повышение надежности срабатывания обратного клапана.
Следовательно, предложенное техническое решение может быть получено только путем творческого подхода и неочевидно для среднего специалиста в этой области, т.е. имеет изобретательский уровень по сравнению с существующим уровнем техники.
Мобильное устройство работает следующим образом.
В начале работ по обточке оператор производит измерения геометрических параметров колесных пар. Данные измерения далее загружаются в центральный контроллер. Оператор на панели выбирает тот тип профиля колеса, который необходимо получить по окончании обточки. Далее оператор вывешивает обтачиваемую колесную пару при помощи гидравлического подъемного механизма и приводит во вращение колесную пару.
Центральный контроллер в автоматическом режиме производит анализ и сравнение измеренного реального профиля с выбранным оператором на операторской панели и производит расчет толщины припусков снимаемого металла в различных зонах профиля поверхности колеса.
Тем самым реализуется система адаптивной обработки профиля колеса в зависимости от реального профиля колеса, что дает эффект экономии времени на один проход и значительно экономит общее время на обточку.
В случае необходимости при несоответствии заданных значений, станок изменит скорость подачи и усилие прижатия ролика самостоятельно.
Мониторинг технического состояния оборудования, идет в непрерывном режиме, а также обмен данным с операторской панелью и мобильными устройствами вывода информации. Система управления передает управляющие и диагностические сигналы на серводвигатели мобильного привода.
Процесс работы устройства иллюстрируется кинематической схемой фиг. 4, из которой видно, что как в процессе обточки система управления в автоматическом режиме управляет процессом вращения колесной пары в результате анализа нагрузки на ось X и ось Y.
Здесь Ц1 - центр поворота сервопривода поджатия, Ц2 - центр оси взаимного вращения вилки 15 и щеки цапфы 9, который при поджатии ролика 7 перемещается по траектории Тр1 в положение Ц2-2, при этом длина штока Ш1 увеличивается до длины LU2, а центр цапфы Ц1 перемещается в точку Ц2. Центр ЦЗ в точку Ц3-2 по траектории Тр-2 радиусом R2 равным радиусу R1.
Использование изобретения позволяет повысить качество и снизить время профилирования поверхности катания за счет автоматической адаптации нагрузочных режимов мобильного привода с параметрами токарного профилирования поверхности катания колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программированного профилирования поверхности катания колесной пары рельсового транспортного средства | 2018 |
|
RU2709910C2 |
| НИЗКОУРОВНЕВЫЙ ТОКАРНЫЙ СТАНОК ПОДВИЖНОГО БАЗИРОВАНИЯ ДЛЯ ВОССТАНОВЛЕНИЯ КОЛЕСНОЙ ПАРЫ | 2021 |
|
RU2759101C1 |
| ТОКАРНЫЙ СТАНОК ДЛЯ КОЛЕС ПОЕЗДА | 2009 |
|
RU2521564C2 |
| ПОДЪЕМНО-ЦЕНТРИРУЮЩАЯ СИСТЕМА КОЛЕСОТОКАРНОГО СТАНКА | 2020 |
|
RU2722496C1 |
| Металлорежущий станок для обработки отверстия ступицы железнодорожных колес | 2023 |
|
RU2809883C1 |
| Стенд для испытаний колесно-моторных блоков локомотивов | 1988 |
|
SU1672263A1 |
| АВТОНОМНЫЙ РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2022 |
|
RU2796166C1 |
| МОБИЛЬНЫЙ ПОЛУАВТОМАТИЧЕСКИЙ ТОКАРНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСНОЙ ПАРЫ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2716611C2 |
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2493022C1 |
| КОЛЕСО | 2004 |
|
RU2284922C2 |

Изобретение относится к области механической обработки поверхности катания колес. Устройство содержит основание, снабженное средством крепления к рельсу, и размещенный на устройстве сервопривод вращения ведущего ролика, выполненный в виде электродвигателя, корпус которого закреплен на одной боковине С-образной цапфы, а его ротор соединен с валом, установленным на подшипниках и несущим жестко прикрепленный к нему ведущий ролик, а свободные концы боковин цапфы шарнирно прикреплены посредством осей к опорам, установленным на основании, при этом к средней части цапфы прикреплена вилка, шарнирно соединенная с ходовой гайкой шарико-винтовой передачи, винт которой снабжен средством его вращения, управляемым блоком управления сервоприводом поджатия ведущего ролика. При этом блок управления сервоприводом поджатия ведущего ролика и блок управления сервоприводом вращения выполнены с возможностью адаптации с параметрами профилирования колеса на токарном станке с возможностью обеспечения постоянного усилия поджатия посредством адаптации блока ЧПУ привода ролика с блоком ЧПУ системы токарной обработки. 6 з.п. ф-лы, 6 ил.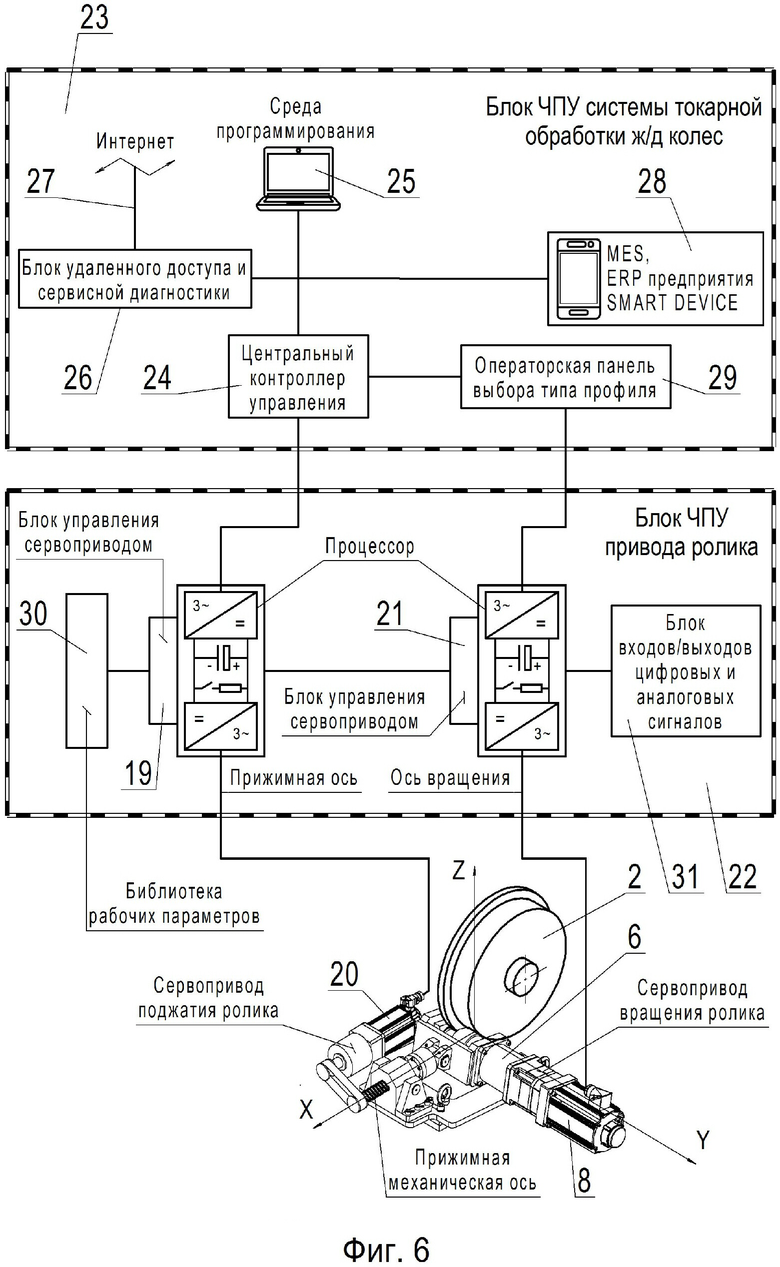
1. Мобильное устройство для вращения колесной пары при механической обработке поверхности катания колес, содержащее основание, снабженное средством крепления к рельсу, и размещенный на устройстве сервопривод вращения ведущего ролика, выполненный в виде электродвигателя, корпус которого закреплен на одной боковине С-образной цапфы, а его ротор соединен с валом, установленным на подшипниках и несущим жестко прикрепленный к нему ведущий ролик, а свободные концы боковин цапфы шарнирно прикреплены посредством осей к опорам, установленным на основании, при этом к средней части цапфы прикреплена вилка, шарнирно соединенная с ходовой гайкой шарико-винтовой передачи, винт которой снабжен средством его вращения, управляемым блоком управления сервоприводом поджатия ведущего ролика, причем блок управления сервоприводом поджатия ведущего ролика и блок управления сервоприводом вращения выполнены с возможностью адаптации с параметрами профилирования колеса на токарном станке с возможностью обеспечения постоянного усилия поджатия посредством адаптации блока ЧПУ привода ролика с блоком ЧПУ системы токарной обработки, при этом блок ЧПУ системы токарной обработки включает в себя центральный контроллер управления, связанные с ним среду программирования, блок удаленного доступа и сервисной диагностики с возможностью выхода в глобальную сеть Internet для получения и передачи данных, при этом к среде программирования имеет доступ мобильное средство с возможностью автоматического чтения/записи данных на внутренний сервер с базой данных предприятия, центральный контроллер управления и соединенная с ним операторская панель выбора типа профиля связаны с блоком ЧПУ привода ролика, который включает в себя блок управления сервоприводом поджатия ролика, связанный с базой данных безопасности, синхронизации осей и контроля поломок, и блок управления сервоприводом вращения ролика, причем последний блок управления синхронизирован с блоком управления сервоприводом поджатия ведущего ролика, причем блок управления сервоприводом вращения соединен с блоком входов/выходов цифровых и аналоговых сигналов.
2. Мобильное устройство по п. 1, отличающееся тем, что сервопривод прижатия ролика выполнен в виде электродвигателя.
3. Мобильное устройство по п. 1, отличающееся тем, что сервопривод прижатия ролика выполнен в виде гидропривода.
4. Мобильное устройство по п. 1, отличающееся тем, что беговая дорожка ролика выполнена из резины.
5. Мобильное устройство по п. 4, отличающееся тем, что беговая дорожка ролика выполнена с равномерно распределенными по ее поверхности наклонными насечками в сторону реборды обрабатываемого колеса.
6. Мобильное устройство по п. 1, отличающееся тем, что беговая дорожка ролика выполнена из сжатого полиуретана.
7. Мобильное устройство по п. 1, отличающееся тем, что ролик выполнен металлическим.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| СТАНОК ДЛЯ ОБТОЧКИ КОЛЕСНЫХ ПАР | 1998 |
|
RU2126313C1 |
| СТАНОК ДЛЯ ОБТОЧКИ КОЛЕСНЫХ ПАР БЕЗ ВЫКАТКИ ДЛЯ ВОССТАНОВЛЕНИЯ ПРОФИЛЯ БАНДАЖА ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС | 1996 |
|
RU2107586C1 |
| Станок для обточки колесных пар без выкатки для восстановления профиля бандажа железнодорожных колес | 1989 |
|
SU1708148A3 |
| ТОКАРНЫЙ СТАНОК ДЛЯ КОЛЕС ПОЕЗДА | 2009 |
|
RU2521564C2 |
| Способ выбора пределов измерения в электрическом мосте переменного тока | 1955 |
|
SU128534A1 |
| JPH 09295201 A, 18.11.1997 | |||
| Сплав на основе алюминия | 1973 |
|
SU456845A1 |
| US 4276793 A, 07.07.1981. | |||

