Область и уровень техники
Настоящее изобретение относится, по меньшей мере, в целом, к системам управления вертолетом и, в частности, к аварийному приводу общего шага, имеющему фиксацию фрикциона, и связанный с ним способ для вертолета.
Известным является по предшествующему уровню техники, например, по патенту США № 4667909 (далее - патент «909»), что внезапный отказ двигателя во время полета вертолета требует немедленного внимания пилота для перехода к авторотации посредством понижения общего шага лопастей несущего винта вертолета. Отказ своевременного уменьшения общего шага может привести к срыву потока лопастей несущего винта. Такой срыв потока лопастей несущего винта, как правило, приводит к катастрофическому разрушению, когда вертолет, буквально, падает с неба. Одним примером такой катастрофы, которая, вероятно, явилась последствием срыва потока несущего винта, является произошедшая в Соединенном Королевстве в марте 1998 года и является предметом бюллетеня AAIB № 11/98. Такая катастрофа, как правило, будет смертельной для всех, кто находится на борту летательного аппарата. Конкретным вертолетом, который участвовал в этой катастрофе, был Robinson R22, который представляет собой легкий вертолет, имеющий низко-инерционную систему несущего винта. Следует понимать, что низко-инерционная система несущего винта может быть остановлена легче, чем система несущего винта, имеющая больший уровень инерции. В докладе предмета катастрофы изложены условия эксплуатации для Robinson R22, при которых скорость несущего винта будет уменьшаться до непоправимого значения менее чем за 1 секунду во время набора высоты.
В качестве решения, Заявитель разработал аварийное устройство уменьшения общего шага, которое описано в патенте США № 8360369 (далее - патент 369) и в патенте США № 8651425 (далее - патент 425), каждый из которых раскрывается настоящим путем ссылки. Раскрытое устройство по патентам «369» и «425» применяет усилие уменьшения общего шага непосредственно к рычагу управления общим шагом. В то время как патенты «369» и «425» представляли собой значительный скачок в существующем в настоящее время состоянии и продолжают предоставлять преимущества с точки зрения повышения безопасности полетов на легком вертолете, заявитель теперь приводит аварийный привод общего шага, который дает еще дополнительные преимущества.
Вышеупомянутые примеры предшествующего уровня техники и ограничения, связанные с этим, предназначены для иллюстрации и не являются исключающими. Другие ограничения известного уровня техники станут очевидными для специалистов в данной области после прочтения спецификации и изучения чертежей.
Сущность изобретения
Следующие варианты осуществления и их аспекты описаны и проиллюстрированы в сочетании с системами, инструментами и способами, которые должны быть показательными и иллюстративными, а не ограничивать их объем. В различных вариантах осуществления одна или несколько из вышеописанных проблем были уменьшены или устранены, тогда как другие варианты осуществления направлены на другие улучшения.
В целом, устройство описано для использования с вертолетом, включающим в себя систему несущего винта, имеющую основной несущий винт с регулируемым шагом, который является управляемым, по меньшей мере, частично, пилотом с использованием рычага управления общим шагом, при этом рычаг управления общим шагом поворотно поддерживает рычаг управления фрикционом, как части управления фрикционом, который является зацепляемым пилотом для избирательного увеличения управляющего усилия, которое требуется как минимум для перемещения рычага управления общим шагом.
В одном аспекте раскрытия, устройство включает в себя привод, включающий двигатель, имеющий выходной вал для вращения, для изменения регулируемого шага посредством приложения усилия срабатывания, и приводной рычажный механизм, который зацепляет рычаг фрикциона для приложения усилия срабатывания непосредственно к рычагу управления фрикционом так, что усилие срабатывания первоначально расцепляет управление фрикционом для уменьшения управляющего усилия, а впоследствии уменьшает регулируемый шаг к минимальному положению общего шага. Устройство управления выполнено с возможностью приема сигнала, который указывает на состояние низкого RPM несущего винта, и для реакции на сигнал посредством активации приводного устройства для оказания усилия срабатывания.
В другом аспекте раскрытия, приводное устройство включает в себя двигатель, имеющий выходной вал для вращения, для изменения регулируемого шага посредством приложения усилия срабатывания, и сцепление, поддерживаемое выходным валом, и в оперативной связи с рычагом управления общим шагом, так что сцепление скользит относительно выходного вала, (i) чтобы позволить пилоту преодолеть усилие срабатывания используя рычаг управления общим шагом, и (ii) реагировать на зацепление управления фрикционом пилотом, а в противном случае сцепление вращается вместе с валом двигателя для смещения регулируемого шага к минимальному положению общего шага. Устройство управления выполнено с возможностью приема сигнала, который указывает на состояние низкого RPM несущего винта, и для реакции на сигнал посредством активации приводного устройства для оказания усилия срабатывания.
Краткое описание чертежей
Примеры вариантов осуществления проиллюстрированы на прилагаемых чертежах. Предполагается, что варианты осуществления и чертежи, раскрытые в данном документе, должны быть скорее иллюстративными, чем ограничивающими. На чертежах:
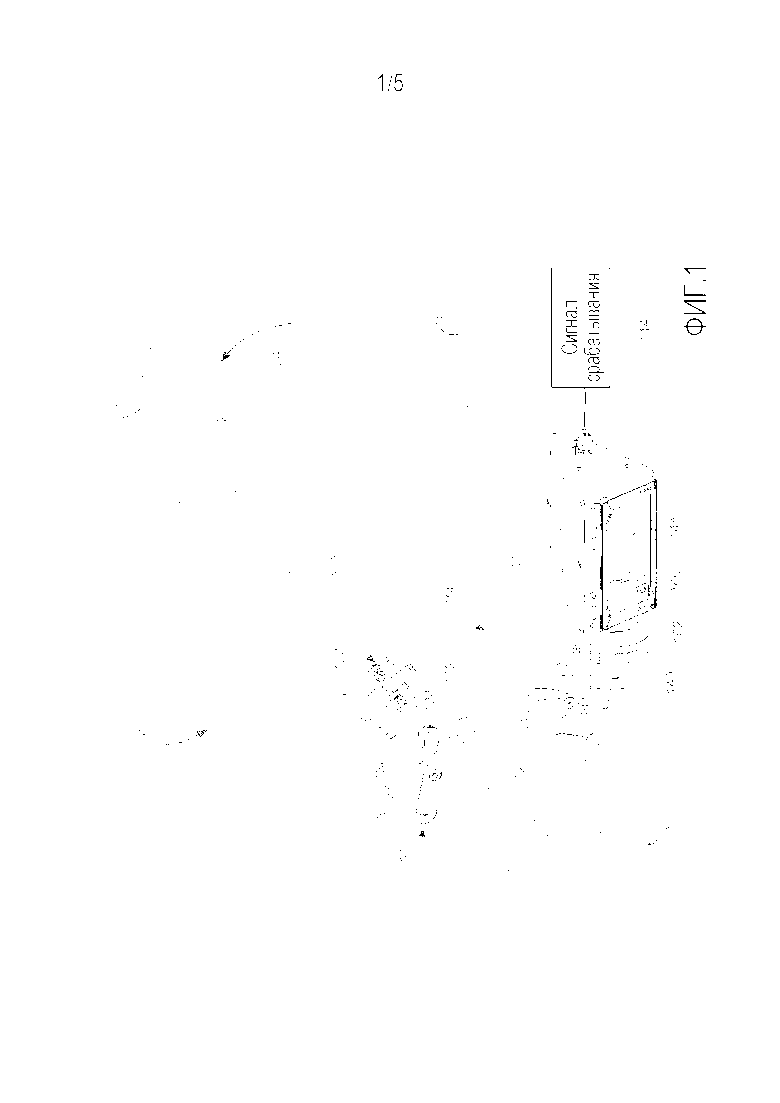
Фиг.1 - схематичный вид в перспективе варианта осуществления рычага управления общим шагом вертолета, соединенного с аварийным приводом общего шага по настоящему раскрытию;
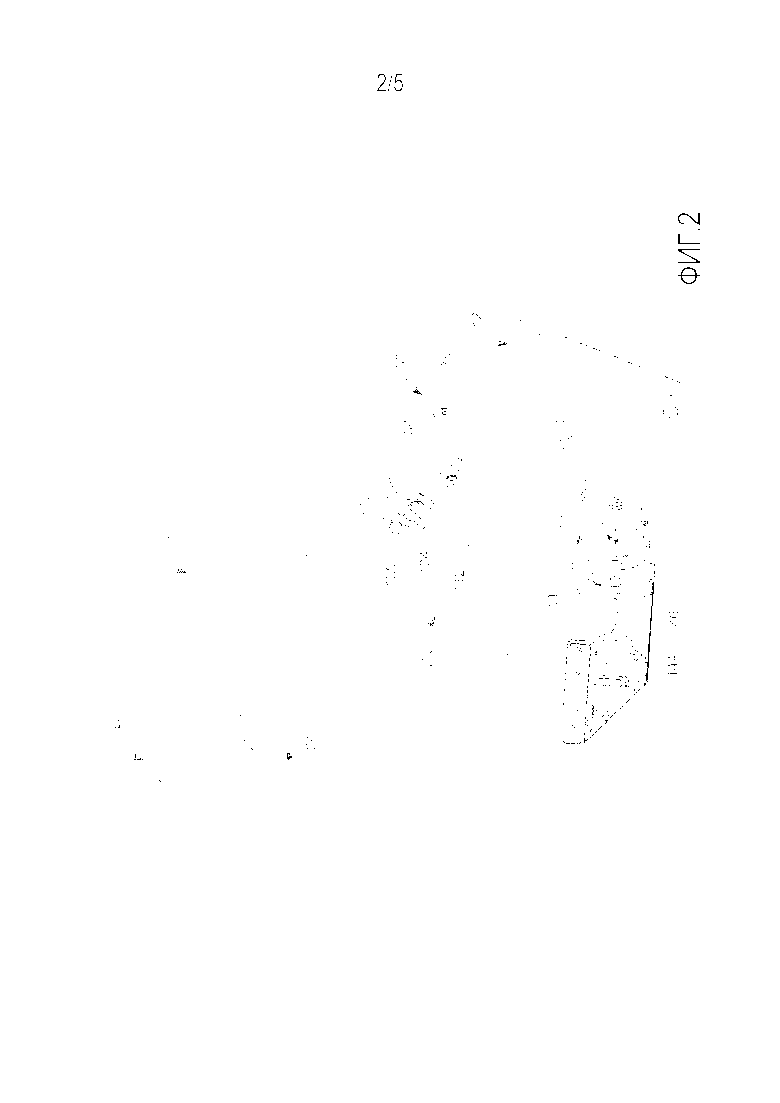
Фиг.2 - другой схематичный вид, выполненный с другого ракурса, варианта осуществления рычага управления общим шагом вертолета и аварийного привода общего шага по фиг.1;
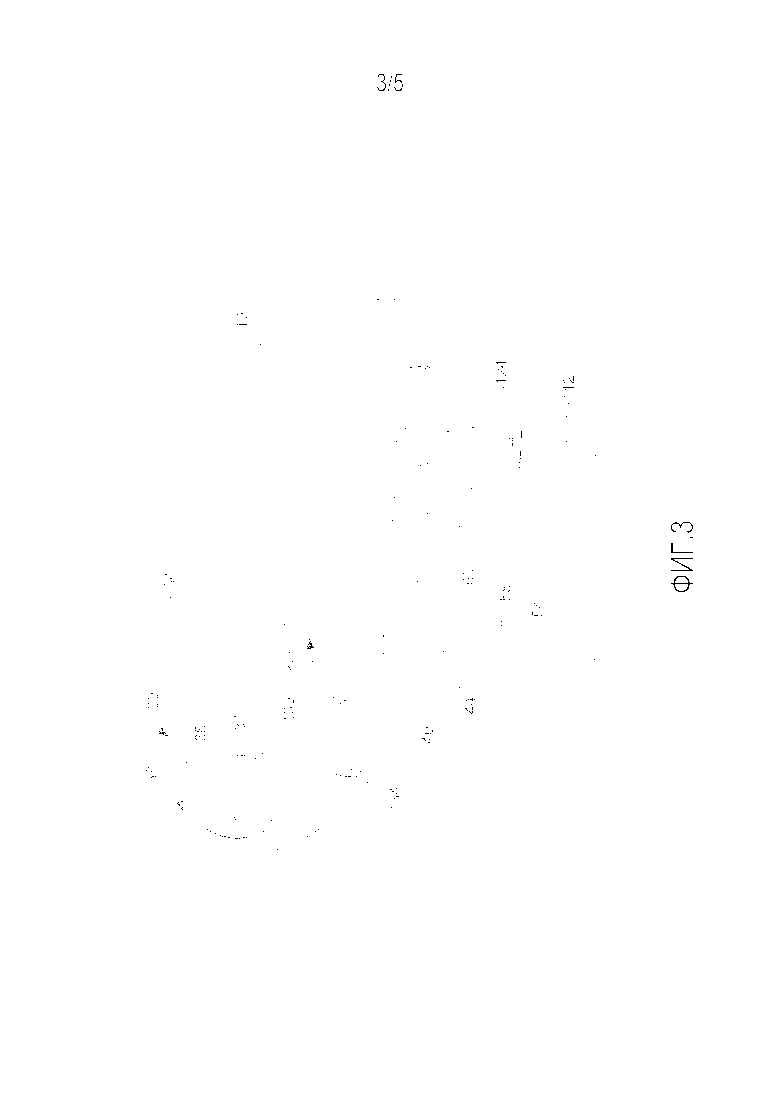
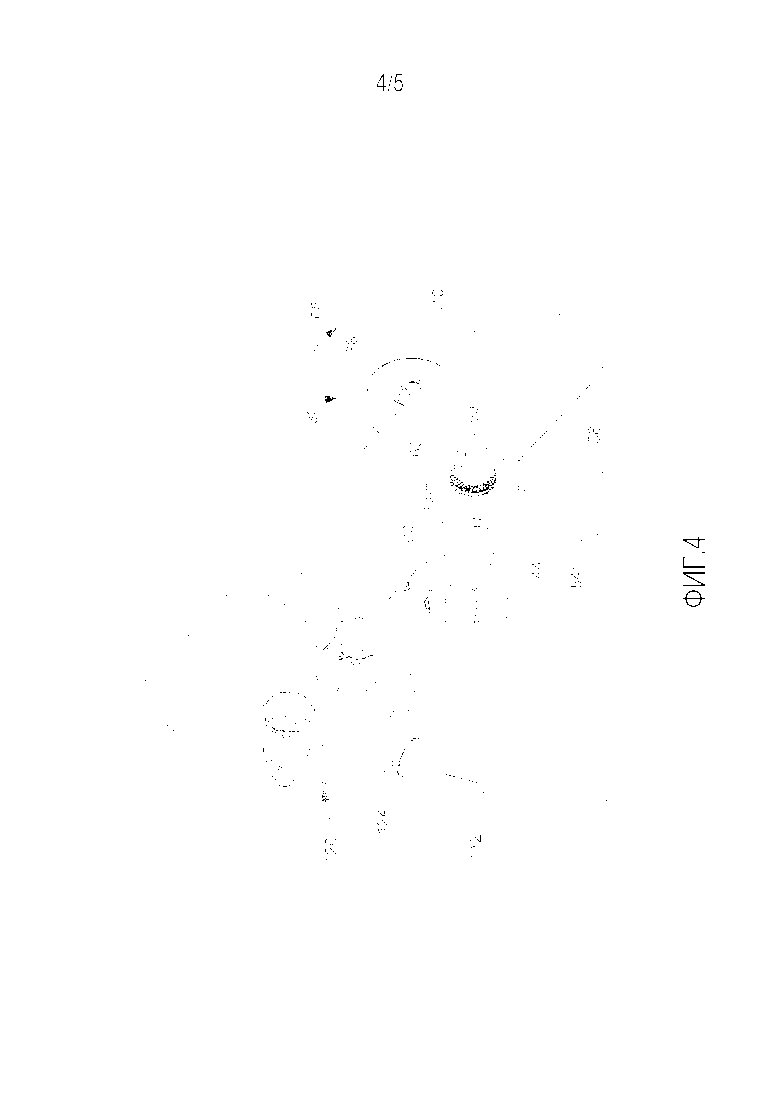
Фиг. 3 и 4 - дополнительные увеличенные схематичные изображения разреза в перспективе, иллюстрирующие детали управления фрикционом и управления общим шагом, а также вариант осуществления интерфейса управления фрикционом для аварийного управления общим шагом по настоящей заявке; и
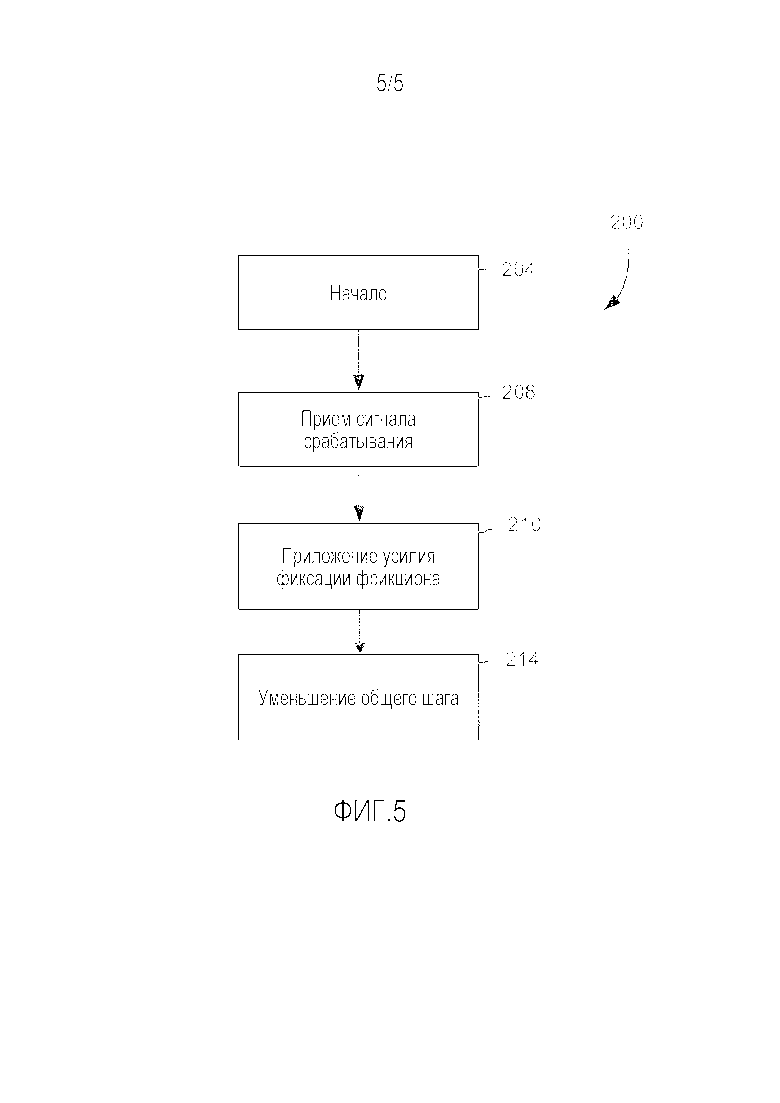
Фиг.5 - блок-схема, иллюстрирующая вариант осуществления способа работы аварийного привода общего шага, в соответствии с настоящим раскрытием.
Способы осуществление изобретения
Представлено следующее описание, позволяющее специалисту в данной области техники сделать и использовать изобретение, и предусмотрено в контексте патентной заявки и ее требований. Различные модификации в отношении описанных вариантов осуществления будут легко очевидны специалистам в данной области техники, а общие принципы, определенные в материалах настоящей заявки, могут применяться к другим вариантам осуществления. Таким образом, настоящее изобретение не подразумевается быть ограниченным показанным вариантом осуществления, но должно быть согласованным самым широким объемом в соответствии с принципами и признаками, описанными в данном документе, включая модификации и эквиваленты. Следует отметить, что чертежи не выполнены в масштабе, а являются схематичными по своему характеру, таким образом, который, как считается, лучше всего иллюстрирует представляющие интерес признаки. Описательная терминология может быть принята с целью улучшения понимания читателя в отношении различных видов, представленных на фигурах, и никоим образом не является ограничивающей.
Как обсуждалось выше, патенты «369» и «425» продолжают обеспечивать повышенную безопасность полетов на легких вертолетах. Однако в настоящий момент заявитель признает, что могут быть предоставлены дальнейшие улучшения. В этом отношении вес является ценным товаром, особенно в легких вертолетах. Любое уменьшение веса компонентов управления в вертолете желательно с оговоркой, что не может быть никаких компромиссов в безопасности полетов исключительно ради уменьшения веса. Один из подходов к этой проблеме состоит в том, чтобы просто заменить доработанные легкие компоненты оригинальных компонентов, легкими компонентами, оказавшимися еще более надежными, чем исходные компоненты. Однако Заявитель выявляет совершенно иной подход, который позволяет уменьшить физический вес, а также размер аварийного привода общим шагом без привнесения компромисса в области безопасности. В качестве предпосылки изобретения, большинство вертолетов включают в себя управление фрикционом, что позволяет пилоту устанавливать или блокировать рычаг общего шага, или рычаг управления в заданном положении, так что пилот может, по меньшей мере, мгновенно отпустить свою руку от рычага общего шага для выполнения других действий. Во время нормальной работы вертолета рычаг управления общим шагом не будет перемещаться, когда управление фрикционом включено, хотя пилот может преодолеть сопротивление управления фрикционом и перемещать рычаг общего шага, например, в ответ на чрезвычайную ситуацию. Как будет видно, расширенный подход настоящей заявки включает автоматическую манипуляцию управлением фрикционом, что предусматривается в качестве стандартной функциональной возможности в связи с вертолетом. Этот расширенный подход обеспечивает снижение, как физического веса, так и размеров аварийного привода общего шага.
Теперь обратим внимание к чертежам, на которых одинаковые ссылочные позиции могут относиться к одинаковым элементам на всех различных видах. Фиг. 1 и 2 представляют собой схематичные иллюстрации различных видов в перспективе рычага управления общим шагом вертолета, который, в целом, обозначен ссылочной позицией 10, и который представляет собой рычаг управления общим шагом на вертолете, таком как, например, Robinson R22. Следует отметить, что рычаг управления общим шагом изменяет шаг всех лопастей несущего винта в унисон или вместе для целей управления подъемом. Рычаг 10 управления общим шагом поворачивается вокруг точек 12 вблизи от поворотного конца рычага управления общим шагом. Ручка или свободный конец 20 рычага управления общим шагом сконфигурирована для захвата пилотом и включает в себя управление дроссельной заслонкой, которая приводится в действие посредством поворота ручки 20, как показано двойной стрелкой 22. Пилот может увеличить общий шаг посредством перемещения ручки 20 поворотно в направлении, указанном стрелкой 24, или уменьшить общий шаг посредством перемещения ручки 20 в противоположном направлении. Фиг. 1 и 2 иллюстрируют рычаг управления общим шагом в полностью поднятом положении, тогда как фиг.1 дополнительно иллюстрирует рычаг управления общим шагом в полностью опущенном положении в фантомном изображении с использованием пунктирных линий и обозначенном ссылочной позицией 10'.
Теперь обратим внимание на фиг. 3 и 4 в сочетании с фигурами 1 и 2. Фиг. 3 и 4 представляют собой схематичные, дополнительные, увеличенные частично разрезные виды в перспективе, иллюстрирующие детали управления фрикционом, в целом, обозначенного ссылочной позицией 30. Управление фрикционом включает в себя рычаг 34 управления фрикционом, имеющий дальний конец, который поддерживает кнопку 38 управления, доступную пилоту. Противоположный конец рычага управления фрикционом поддерживается валом 40 с рычагом управления фрикционом, закрепленном на валу. Последний посредством резьбы принимается трубкой 44 (фиг. 3 и 4), которая сама поддерживается рычагом управления общим шагом. Как лучше видно на фиг.4, вал 40 заканчивается головкой 50. Вал в непосредственной близости к головке 50, продолжается через удлиненную прорезь 54, которая образована фрикционным брусом 58. Вал 40 поддерживает пару фрикционных шайб таким образом, что фрикционная шайба 60 принимается против каждой стороны фрикционного бруса 58 и захватывается между трубой 44 и головкой 50. Управление фрикционом показано в зацепленном положении, так что пилот поворачивает рычаг 34 управления фрикционом в направлении, указанном стрелкой 68. Соответственно, поворот рычага управления фрикционом заставляет вал 40 посредством резьбы зацеплять трубу 44 таким образом, чтобы выборочно смещать фрикционные шайбы 60 против боковых сторон фрикционного бруса 58, чтобы позволить пилоту, по меньшей мере, временно блокировать управление общим шагом на месте, так что фрикционный брус не будет двигаться непреднамеренно, но пилот может положительно переместить рычаг управления общим шагом, преодолевая силу трения. Во время перемещения рычага управления общим шагом, вал 40 скользит в прорези 54 фрикционного бруса для обеспечения нормального перемещение общего шага пилотом и обеспечения пилоту возможности установления общего шага в любое выбранное положение использованием управления фрикционом так, чтобы пилот был способен, по меньшей мере, мгновенно освободить его или свою руку от рычага управления общим шагом. Описывая управление фрикционом Robinson R22, следует принять во внимание, что изложенные здесь идеи легко могут быть применены без ограничения для фиксации управления фрикционом с другими вертолетами до уменьшения общего шага независимо от того, управление фрикционом осуществляется механическим или электронным приводом.
Обращаясь снова к фиг.1, аварийный привод общего шага с фрикционной фиксацией, в целом, обозначен ссылочной позицией 100. Аварийный привод включает в себя основной блок 110, который может быть выполнен с возможностью приема сигнала 114 срабатывания, такого как, например, сигнал низкой RPM, который генерируется вертолетом. В другом варианте осуществления, автопилот может генерировать сигнал активации. В случае Robinson R22, сигнал низкой RPM генерируется, когда скорость несущего винта падает до 97% от нормальной или меньше. Обычно, сигнал низкой RPM используется для включения предупреждающего звукового сигнала и света, чтобы привлечь внимание пилота к состоянию скорости несущего винта. Способ, которым основной блок 110 использует сигнал активации, станет очевидным в последующих обсуждениях.
Трос управления или приводной рычажный механизм 112 продолжается от основного блока 110 к устройству 120 направляющей трубки (лучше всего видно на фигурах 3 и 4). Устройство направляющей трубки может быть зажато, как показано, или иным образом закреплено в соответствующем промежуточном положении на рычаге управления общим шагом, то есть перед рычагом 30 управления фрикционом. Следует отметить, что термин «перед» со ссылкой на направление предназначен для указания направления к передней части или носовой части вертолета. Устройство направляющей трубки может располагаться достаточно далеко от рычага управления фрикционом и поворотного конца рычага управления общим шагом, чтобы избежать каких-либо помех в нормальной работе рычага управления общим шагом или при приведении в действие пилотом. Устройство направляющей трубки включает в себя направляющую трубку 124, через которую продолжается трос 112, так что направляющая трубка преобразует движение троса из, в целом, вертикального направления в направление, которое, по меньшей мере, в целом, выровнено с вытянутой длиной рычага управления общим шагом. Направляющая трубка может быть образована из любого подходящего материала, такого как, например, нержавеющая сталь, и не ограничивается конкретной формой, которая была проиллюстрирована. В настоящем варианте осуществления, трос 112 заканчивается концевым фитингом 130, который шарнирно принимается в промежуточном положении вдоль длины рычага 34 управления фрикционом, например, с помощью крепежного элемента 134.
Основной блок 110 включает в себя устройство 140 шкива, которое принимает трос 112, а двигатель 144 может приводить в действие редуктор 146 для вращения узла шкива в направлении, которое сматывает трос. Устройство шкива может применять легкую силу подтягивания на трос 112, что является достаточным, чтобы избежать провисания троса, когда пилот перемещает рычаг общего шага. В ответ на сигнал 114 срабатывания, основной блок 110 втягивает трос 112, чтобы приложить усилие к рычагу 34 управления фрикционом, по меньшей мере, в целом, в направлении, которое обозначено стрелкой 150. Таким образом, рычаг 34 управления фрикционом, если он зацеплен, первоначально перемещается в направлении расцепления, противоположном стрелке 68, так что управление 30 фрикционом, по меньшей мере, существенно расцепляется без перемещения рычага управления общим шагом. Как только рычаг управления фрикционом поворачивается, по меньшей мере, существенно в расцепленное или освобожденное положение (обозначенное ссылочной позицией 34' и показанное фантомным способом, используя пунктирные линии на фиг.3), при котором рычаг фрикциона прекращает поворот, усилие, которое прикладывается к рычагу 34 фрикциона на конце троса 112 затем переводится в, по меньшей мере, в целом вертикальное направление посредством направляющей трубки 124 для опускания рычага 12 общего шага к минимальному положению общего шага. Конечно, если управление фрикционом первоначально находится в освобожденном положении, усилие срабатывания автоматически служит для немедленного опускания рычага общего шага. Усилие срабатывания может быть применено в виде неограничивающего примера в течение соответствующего периода времени, например, до примерно 3 секунд. Привод 110 может включать в себя сцепление 152, так чтобы сцепление могло скользить, если необходимо, когда рычаг управления общим шагом достигает минимального положения общего шага. Пилот может также применять усилие переопределения, чтобы заставить сцепление проскальзывать так, чтобы пилот мог поддерживать положение рычага управления общим шагом или поднимать рычаг управления общим шагом независимо от применения усилия срабатывания. В одном варианте осуществления, сцепление может быть сконфигурировано таким образом, что сцепление скользит, если управление фрикционом зацеплено, по меньшей мере, в некоторой ограниченной степени, тем самым поддерживая текущее положение рычага управления общим шагом. Это может произойти, например, в ответ на то, что пилот активно удерживает рычаг управления фрикционом в зацепленном положении, в отличие от удержания рычага общего шага на месте во время приложения усилия срабатывания, или если рычаг фрикциона каким-то образом заклинил.
Заявители признают, что менее чем 4 фунта силы, измеренных в месте вытягивания рычага фрикциона требуется для перемещения рычага фрикциона вперед, в то время как свыше 6 фунтов силы, измеренных на свободном конце рычага общего шага, необходимо для перемещения рычага управления общим шагом к минимальному положению общего шага, даже если управление фрикционом находится в расцепленном положении. Заявители дополнительно признают, что при зацепленном управлении фрикционом, даже в относительно ограниченной степени, усилие, необходимое для перемещения рычага управления общим шагом, применяемое либо пилотом, либо аварийным приводом, может быть намного выше. Значительная разница между первой величиной усилия, которой необходимо для перемещения рычага управления фрикционом в направлении расцепленного положения, и второй величиной усилия, которое необходимо для перемещения рычага управления общим шагом в минимальное положение независимо от текущей настройки управления фрикционом, позволяет аварийному приводу по настоящему раскрытию отключить управление фрикционом до опускания рычага управления общим шагом. Исходя из этого, общий физический размер привода 110 может быть уменьшен, используя относительно меньший двигатель 144 и редуктор 146. Дополнительно, может быть уменьшено усилие отключения сцепления, которое прикладывается пилотом к рычагу общего шага, для предотвращения аварийного привода от опускания рычага управления общим шагом, тем самым делая вертолет, более полет пригодным. Уменьшение усилия отключения сцепления дополнительно способствует уменьшению стремления пилота к применению импульса направленного вверх усилия к рычагу управления общим шагом, когда аварийный привод прекращает применение усилия срабатывания.
Работа аварийного привода может выполняться автоматически в ответ на прием сигнала 114 срабатывания, и может быть инициирована, по существу, мгновенно, по меньшей мере, с практической точки зрения, например, в 0,001 секунды (1 мс) или менее в ответ на сигнал срабатывания, но в любом случае значительно меньше времени реакции даже внимательного пилота. В одном варианте осуществления, время реакции основного блока 110 может регулироваться и все же оставаться намного меньше, чем типичное время реакции пилота для обеспечения значительного повышения безопасности. Как правило, однако, схеме будет разрешено реагировать так быстро, как только она способна реагировать без какой-либо дополнительной задержки. Как будет описано более подробно, усилие отведения назад, которое применяется к рычагу 10 управления общим шагом аварийным приводом 100, может быть преодолено пилотом, хотя усилие является достаточным для информирования пилота о том, что устройство пытается опустить рычаг общего шага, когда левая рука пилота удерживает ручку 20 общего шага. В одном варианте осуществления, усилие отведения назад может быть сконфигурировано так, что рычаг общего шага может быть опущен аварийным приводом только в том случае, если рычаг 34 управления фрикционом был перемещен, по меньшей мере, приблизительно или в пределах ограниченного диапазона от отведенного назад или расцепленного положения.
Теперь обратим внимание на фиг.5, которая иллюстрирует вариант осуществления способа работы аварийного привода общего шага согласно настоящему изобретению, имеющего способность фиксации фрикциона, в целом, обозначенного ссылочной позицией 200. Способ начинается с этапа 204 и переходит к этапу 208, который принимает сигнал активации. Как обсуждалось выше, сигнал активации, например, может представлять собой сигнал низкой RPM, сигнал, который генерируется автопилотом или любым подходящим сигналом. На этапе 210, усилие привода прикладывается к рычагу управления фрикционом для освобождения рычага управления фрикционом из зацепленного положения, если рычаг управления фрикционом находится в зацепленном положении, тем самым перемещая рычаг управления фрикционом в расцепленное положение. На этапе 214 применение усилия привода продолжает опускать рычаг общего шага к минимальному положению общего шага.
Учитывая вышеизложенное, реализуется значительное уменьшение размера и веса аварийного привода общего шага по настоящему раскрытию. В результате устранения необходимости преодоления дополнительного сопротивления, обусловленного зацеплением управления фрикционом, величина усилия срабатывания, которая необходима для опускания рычага общего шага, не превышает минимальной величины усилия, которое необходимо для перемещения ручки общего шага с управлением фрикционом в расцепленное положение. Основываясь на этом быстром уменьшении величины усилия срабатывания, которое необходимо, практически все компоненты аварийного привода общего шага могут быть меньше и/или легче. Например, может использоваться меньший электрический приводной двигатель, который потребляет меньше электроэнергии. В качестве другого примера, приводной двигатель может приводить в действие меньший, более легкий редуктор. Еще дополнительные преимущества связаны с усовершенствованным аварийным приводом общего шага по настоящему раскрытию. Например, если пилот выбирает действие отключения привода от опускания ручки общего шага, пилот имеет возможность простого зацепления и/или удержания рычага управления фрикционом, в отличие от самой ручки общего шага. В качестве другого преимущества, Заявитель утверждает, что приложение относительно меньшей величины усилия срабатывания рычага общего шага, с меньшей вероятностью приведет к сверх компенсации пилотом при преодолении вручную действия автоматического усилия срабатывания.
Хотя ряд примеров осуществления аспектов и вариантов осуществления обсуждался выше, специалисты в данной области техники обнаружат определенные модификации, перестановки, добавления и их подкомбинации. Например, в некоторых вариантах осуществления, жесткая связь может использоваться без необходимости использования гибкого троса для снятия управления фрикционом и последующего опускания рычага управления общим шагом. Поэтому предполагается, чтобы последующие прилагаемые формулы изобретения и формулы изобретения, представленные в будущем, интерпретировались таким образом, чтобы они включали все такие модификации, перестановки, дополнения и подкомбинации, которые находятся в их истинном духе и объеме.
Все элементы, части и этапы, описанные здесь, предпочтительно включены. Должно быть понятно, что любые из этих элементов, частей и этапов могут быть заменены другими элементами, частями и этапами, или полностью удалены, как это будет очевидно специалистам в данной области техники.
В целом, это описание раскрывает, по меньшей мере, следующее:
Аварийный привод общего шага включает в себя приводной двигатель для создания усилия срабатывания и приводной рычажный механизм, который непосредственно зацепляет рычаг управления фрикционом, который шарнирно поддерживается на ручке общего шага вертолета для приложения усилия срабатывания непосредственно к рычагу управления фрикционом так, что усилие срабатывания сначала расцепляет управление фрикционом, а затем уменьшает регулируемый шаг к минимальному положению общего шага. Привод может включать в себя сцепление, которое скользит, чтобы позволить пилоту преодолеть усилие срабатывания, и который скользит в зависимости от зацепления управления фрикционом пилотом, но в противном случае, сцепление вращается вместе с валом двигателя для смещения регулируемого шага к минимальному положению общего шага.
Концепции
Это описание раскрывает, по меньшей мере, следующие концепции.
Концепция 1. Для использования с вертолетом, включающим в себя систему несущего винта, имеющую основной несущий винт с регулируемым шагом, который управляется, по меньшей мере, частично, пилотом с использованием рычага управления общим шагом, при этом рычаг управления общим шагом шарнирно поддерживает рычаг управления фрикционом, как части управления фрикционом, который является зацепляемым пилотом для избирательного увеличения управляющего усилия, которое требуется как минимум для перемещения рычага управления общим шагом, при этом устройство содержит:
- привод, включающий двигатель, имеющий выходной вал для вращения для изменения регулируемого шага посредством оказания усилия срабатывания;
- приводной рычажный механизм, который зацепляет рычаг фрикциона для приложения усилия срабатывания непосредственно к рычагу управления фрикционом так, что усилие срабатывания на начальном этапе расцепляет управление фрикционом для уменьшения управляющего усилия, а после этого, уменьшает регулируемый шаг к минимальному положению общего шага; и
- устройство управления, которое выполнено с возможностью приема сигнала, который указывает на состояние низкого RPM несущего винта, и реагирования на упомянутый сигнал посредством активации приводного устройства для оказания усилия срабатывания.
Концепция 2. Устройство по Концепции 1, в котором приводной рычажный механизм включает гибкий трос, проходящий от привода к рычагу управления фрикционом для приложения усилия срабатывания.
Концепция 3. Устройство по Концепции 2, в котором привод включает в себя устройство шкива, которое принимает гибкий трос вблизи привода, и редуктор, который вращательно приводит в действие устройство шкива в ответ на вращение выходного вала двигателя.
Концепция 4. Устройство по Концепции 2 или 3, в котором гибкий трос включает в себя дальний конец, который поворотно прикреплен к рычагу управления фрикционом.
Концепция 5. Устройство по Концепциям 2-4, в котором рычаг управления общим шагом включает в себя вытянутую длину, и в котором приводной рычажный механизм выполнен с возможностью поддержки гибкого троса для преобразования продольного движения гибкого троса от, по меньшей мере, в целом, вертикального направления к направлению, которое, по меньшей мере, в целом, является выровненным с вытянутой длиной рычага управления общим шагом.
Концепция 6. Устройство по Концепциям 2-5, в котором приводной рычажный механизм включает в себя направляющую трубку, которая поддерживается рычагом управления общим шагом, и направляющая трубка образует проход для скользящего приема гибкого троса в ней.
Концепция 7. Устройство по Концепции 6, в котором направляющая трубка образована для преобразования продольного движения.
Концепция 8. Устройство по Концепциям 6 или 7, в котором направляющая трубка поддерживается на рычаге управления общим шагом перед рычагом управления фрикционом.
Концепция 9. Устройство по Концепции 8, в котором направляющая трубка достаточно отстоит от рычага управления фрикционом, чтобы обеспечить нормальное перемещение рычага управления фрикционом между зацепленным положением и расцепленным положением.
Концепция 10. Устройство по Концепциям 1-9, в котором привод и приводной рычажный механизм взаимодействуют для первоначального перемещения рычага фрикциона из зацепленного положения в расцепленное положение, в котором рычаг фрикциона останавливается поворотно вращаясь.
Концепция 11. Устройство по Концепции 10, в котором привод и приводной рычажный механизм взаимодействуют для перемещения рычага управления общим шагом к минимальному положению общего шага после того, как рычаг фрикциона достигнет расцепленного положения.
Концепция 12. Устройство по Концепциям 1-11, в котором привод включает в себя сцепление, поддерживаемое выходным валом, так что сцепление скользит в зависимости от, по меньшей мере, частичного зацепления рычага управления фрикционом, которое поддерживается пилотом.
Концепция 13. Устройство по Концепциям 1-11, в котором привод включает в себя сцепление, поддерживаемое выходным валом, так что сцепление скользит относительно выходного вала двигателя, чтобы позволить пилоту преодолеть упомянутое усилие срабатывания.
Концепция 14. Способ для использования с вертолетом, включающим в себя систему несущего винта, имеющую основной несущий винт с регулируемым шагом, который управляется, по меньшей мере, частично, пилотом с использованием рычага управления общим шагом, а управление общим шагом шарнирно поддерживает рычаг управления фрикционом, как части управления фрикционом, который является зацепляемым пилотом для избирательного увеличения управляющего усилия, которое требуется как минимум для перемещения рычага управления общим шагом, при этом способ включает в себя:
- реагирование на показание низкой RPM основного несущего винта, первоначально применяя усилие привода к рычагу управления фрикционом для перемещения рычага управления фрикционом из зацепленного положения в расцепленное положение; и
- после того, как рычаг управления фрикционом достигнет расцепленного положения, продолжая прикладывать усилие привода к рычагу управления фрикционом для перемещения рычага управления общим шагом, имея рычаг управления фрикционом, поддерживаемый на нем с возможностью поворота, к минимальному положению общего шага.
Концепция 15. Для использования с вертолетом, включающим в себя систему несущего винта, имеющую основной несущий винт с регулируемым шагом, который управляется, по меньшей мере, частично, пилотом с использованием рычага управления общим шагом, и рычаг управления общим шагом, шарнирно поддерживающий рычаг управления фрикционом, который может быть зацеплен пилотом для избирательного увеличения управляющего усилия, которое требуется как минимум для перемещения рычага управления общим шагом, при этом устройство содержит:
- приводное устройство, включающее двигатель, имеющий выходной вал для вращения для изменения регулируемого шага посредством приложения усилия срабатывания, и сцепление, поддерживаемое выходным валом, и в оперативной связи с управлением общим шагом, так что сцепление скользит относительно выходного вала, (i) чтобы позволить пилоту преодолевать упомянутое усилие срабатывания, используя рычаг управления общим шагом, и (ii) реагировать на зацепление управления фрикционом пилотом, а в противном случае сцепление вращается вместе с валом двигателя для смещения регулируемого шага к минимальному положению общего шага;
- устройство управления, которое выполнено с возможностью приема сигнала, который указывает на состояние низкого RPM несущего винта, и реагирования на упомянутый сигнал посредством активации приводного устройства для оказания усилия срабатывания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РУЧКИ УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА С ВОЗВРАТНЫМ УСИЛИЕМ, СОДЕРЖАЩЕЕ РЕЗЕРВНЫЙ КАНАЛ | 2015 |
|
RU2678725C2 |
| ИНЦЕПТОР КОМПЛЕКСНОГО ДИНАМИЧЕСКОГО УПРАВЛЕНИЯ ВОЗДУШНЫМ И НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2593185C1 |
| Механическая система торможения несущих винтов вертолёта | 2019 |
|
RU2729870C1 |
| Многоосный летательный аппарат с вертикальным взлетом, посадкой и способ управления им | 2021 |
|
RU2768085C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| РУЧКА УПРАВЛЕНИЯ ТОРМОЗОМ НЕСУЩЕГО ВИНТА | 2017 |
|
RU2652372C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ВЕРТОЛЁТА | 2022 |
|
RU2789499C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗОМ НЕСУЩЕГО ВИНТА | 2016 |
|
RU2652873C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
| Способ посадки вертолета и система для его осуществления | 1991 |
|
SU1819822A1 |
Изобретение относится к области авиации, в частности к системам управления несущими винтами. Аварийный привод общего шага включает в себя приводной двигатель для создания усилия срабатывания и приводной рычажный механизм, который непосредственно зацепляет рычаг управления фрикционом, который шарнирно поддерживается на ручке общего шага вертолета для приложения усилия срабатывания непосредственно к рычагу управления фрикционом. Усилие срабатывания сначала расцепляет управление фрикционом, а затем уменьшает регулируемый шаг к минимальному положению общего шага. Привод может включать в себя сцепление, которое скользит относительно выходного вала, чтобы позволить пилоту преодолеть усилие срабатывания, используя рычаг управления общим шагом, и реагировать на зацепление управления фрикционом пилота. В противном случае сцепление вращается вместе с валом двигателя для смещения регулируемого шага к минимальному положению общего шага. Обеспечивается уменьшение веса и размеров аварийного привода управления общим шагом. 3 н. и 12 з.п. ф-лы, 5 ил.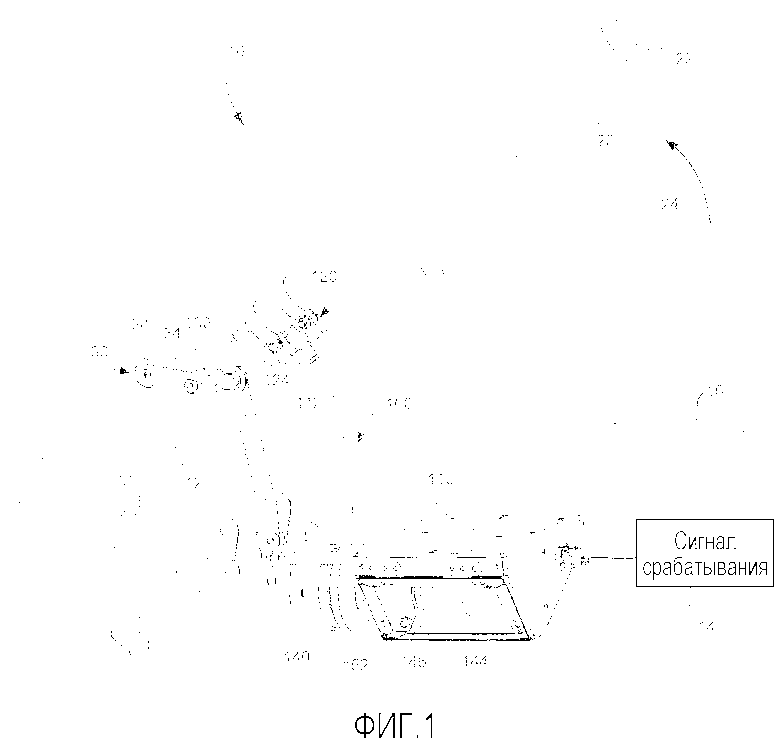
1. Аварийный привод общего шага несущего винта вертолета, включающего в себя систему несущего винта, имеющую основной несущий винт с регулируемым шагом, который управляется, по меньшей мере, частично, пилотом с использованием рычага управления общим шагом, при этом рычаг управления общим шагом шарнирно поддерживает рычаг управления фрикционом, как части управления фрикционом, который является зацепляемым пилотом для избирательного увеличения управляющего усилия, которое требуется как минимум для перемещения рычага управления общим шагом, при этом аварийный привод общего шага содержит:
привод, включающий в себя двигатель, имеющий выходной вал для вращения для изменения регулируемого шага посредством оказания усилия срабатывания;
приводной рычажный механизм, который зацепляет рычаг фрикциона для приложения усилия срабатывания непосредственно к рычагу управления фрикционом таким образом, что усилие срабатывания на начальном этапе расцепляет управление фрикционом для уменьшения управляющего усилия и после этого понижает регулируемый шаг к минимальному положению общего шага; и
устройство управления, которое выполнено с возможностью приема сигнала, который указывает на состояние низкого RPM несущего винта, и реагирования на упомянутый сигнал посредством активации привода для оказания усилия срабатывания.
2. Аварийный привод общего шага по п.1, в котором приводной рычажный механизм включает в себя гибкий трос, проходящий от привода к рычагу управления фрикционом для приложения усилия срабатывания.
3. Аварийный привод общего шага по п.2, в котором привод включает в себя устройство шкива, которое принимает гибкий трос вблизи привода, и редуктор, который вращательно приводит в действие устройство шкива в ответ на вращение выходного вала двигателя.
4. Аварийный привод общего шага по п.2, в котором гибкий трос включает в себя дальний конец, который поворотно прикреплен к рычагу управления фрикционом.
5. Аварийный привод общего шага по п.4, в котором рычаг управления общим шагом имеет вытянутую длину, причем приводной рычажный механизм выполнен с возможностью поддержки гибкого троса для преобразования продольного движения гибкого троса от, по меньшей мере, в основном, вертикального направления к направлению, которое, по меньшей мере, в основном, является выровненным с вытянутой длиной рычага управления общим шагом.
6. Аварийный привод общего шага по п.5, в котором приводной рычажный механизм включает в себя направляющую трубку, которая поддерживается рычагом управления общим шагом, при этом направляющая трубка образует проход для скользящего приема гибкого троса в ней.
7. Аварийный привод общего шага по п.6, в котором направляющая трубка выполнена с возможностью преобразования продольного движения.
8. Аварийный привод общего шага по п.6, в котором направляющая трубка поддерживается на рычаге управления общим шагом перед рычагом управления фрикционом.
9. Аварийный привод общего шага по п.8, в котором направляющая трубка достаточно отстоит от рычага управления фрикционом, чтобы обеспечить нормальное перемещение рычага управления фрикционом между зацепленным положением и расцепленным положением.
10. Аварийный привод общего шага по п.1, в котором привод и приводной рычажный механизм взаимодействуют для первоначального перемещения рычага фрикциона из зацепленного положения в расцепленное положение, в котором рычаг фрикциона останавливается поворотно вращаясь.
11. Аварийный привод общего шага по п.10, в котором привод и приводной рычажный механизм взаимодействуют для перемещения рычага управления общим шагом к минимальному положению общего шага после того, как рычаг фрикциона достигнет расцепленного положения.
12. Аварийный привод общего шага по п.1, в котором привод включает в себя сцепление, поддерживаемое выходным валом, так что сцепление скользит в зависимости от, по меньшей мере, частичного зацепления рычага управления фрикционом, которое поддерживается пилотом.
13. Аварийный привод общего шага по п.1, в котором привод включает в себя сцепление, поддерживаемое выходным валом, так что сцепление скользит относительно выходного вала двигателя, чтобы позволить пилоту преодолеть упомянутое усилие срабатывания.
14. Способ работы аварийного привода общего шага для использования с вертолетом, включающим в себя систему несущего винта, имеющую основной несущий винт с регулируемым шагом, который управляется, по меньшей мере, частично, пилотом с использованием рычага управления общим шагом, при этом рычаг управления общим шагом шарнирно поддерживает рычаг управления фрикционом, как части управления фрикционом, который является зацепляемым пилотом для избирательного увеличения управляющего усилия, которое требуется как минимум для перемещения рычага управления общим шагом, при котором:
в ответ на показание низкой RPM основного несущего винта первоначально применяют усилие привода к рычагу управления фрикционом для перемещения рычага управления фрикционом из зацепленного положения в расцепленное положение; и
после достижения рычагом управления фрикционом расцепленного положения продолжают прикладывать усилие привода к рычагу управления фрикционом для перемещения рычага управления общим шагом, поддерживая рычаг управления фрикционом на нем с возможностью поворота, к минимальному положению общего шага.
15. Аварийный привод общего шага несущего винта вертолета, включающего в себя систему несущего винта, имеющую основной несущий винт с регулируемым шагом, который управляется, по меньшей мере, частично, пилотом с использованием рычага управления общим шагом, при этом рычаг управления общим шагом шарнирно поддерживает рычаг управления фрикционом, который может быть зацеплен пилотом для избирательного увеличения управляющего усилия, которое требуется как минимум для перемещения рычага управления общим шагом, при этом аварийный привод общего шага содержит:
приводное устройство, включающее в себя двигатель, имеющий выходной вал для вращения для изменения регулируемого шага посредством приложения усилия срабатывания, и сцепление, поддерживаемое выходным валом и функционально связанное с рычагом управления общим шагом, так что сцепление скользит относительно выходного вала, чтобы (i) позволить пилоту преодолевать упомянутое усилие срабатывания, используя рычаг управления общим шагом, и (ii) реагировать на зацепление управления фрикционом пилотом, а в противном случае сцепление вращается вместе с валом двигателя для смещения регулируемого шага к минимальному положению общего шага;
устройство управления, которое выполнено с возможностью приема сигнала, который указывает на состояние низкого RPM несущего винта, и реагирования на упомянутый сигнал посредством активации приводного устройства для оказания усилия срабатывания.
| US 8910909 B2, 16.12.2014 | |||
| US 8360369 B2, 29.01.2013 | |||
| Ручка управления летательного аппарата | 1975 |
|
SU533017A1 |
| СПОСОБ ДИАГНОСТИКИ ВЕГЕТАТИВНО-СЕНСОРНОЙ ПОЛИНЕВРОПАТИИ ПРИ ПРОФЕССИОНАЛЬНЫХ ЗАБОЛЕВАНИЯХ ОТ ФУНКЦИОНАЛЬНОГО ПЕРЕНАПРЯЖЕНИЯ И ВИБРАЦИОННОЙ БОЛЕЗНИ | 2000 |
|
RU2192163C2 |
| РУЧКА УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА И ДВИГАТЕЛЯМИ (ШАГ-ГАЗ) ВЕРТОЛЕТА | 0 |
|
SU170303A1 |

