Область техники, к которой относится изобретение
Настоящее изобретение относится к технологии измерения трёхмерного абсолютного положения измеряемой точки на объекте, измеряемом с использованием изображения.
Уровень техники
Трёхмерное измерение по изображению предназначено для измерения на основе изображения, снятого камерой, положения объекта в трёхмерном пространстве, трёхмерной формы объекта, длины объекта и т.п. Существует большое разнообразие способов для трёхмерного измерения по изображению.
В одном примере объект, подлежащий измерению, отображается с использованием двух камер и выполняется триангуляция. При триангуляции расстояние между двумя камерами известно, и можно получить все углы треугольника, образованного одной точкой измеряемого объекта и двумя камерами, и, следовательно, могут быть получены трёхмерные координаты измеряемого объекта. Согласно этому способу, в том случае, когда положение измеряемого объекта не меняется с течением времени, можно получить триангуляцию посредством формирования изображения измеряемого объекта при перемещении одной камеры вместо использования двух камер. В патентной литературе 1 используется способ применения триангуляции посредством формирования изображения объекта, подлежащего измерению, из различных положений и под разными углами с использованием одной камеры, чтобы найти положение измеряемого объекта в трёхмерном пространстве.
Другим способом трёхмерного измерения по изображению является способ, называемый монокулярным зрением, способ вычисления трёхмерных координат объекта с использованием только одной камеры и одного изображения. В патентной литературе 2 трёхмерные координаты измеряемого объекта вычисляются посредством формирования изображения четырёх опорных точек, трёхмерные координаты которых известны, и вычисления искажения объектива камеры, а также положения и угла камеры.
Процесс изготовления чугуна включает этап изготовления литейного чугуна, на котором изготавливается расплавленный чугун посредством взаимодействия железной руды и кокса в печи в условиях высокой температуры и высокого давления. На этапе изготовления литейного чугуна расплавленный чугун в основном производится в печи, называемой доменной печью. Расплавленный чугун представляет собой текучую среду сверхвысокой температуры, около 1500°C, и он сливается через лёточное отверстие, расположенное в нижней части доменной печи. Непосредственно перед окончанием слива происходит явление, называемое турбулентным выпуском металла из печи, при котором происходит энергичный выброс газа, находящегося в печи, из лёточного отверстия вследствие опускания жидкой поверхности остаточного расплавленного чугуна и шлака. Энергично выбрасываемый газ содержит оксид углерода. Поскольку выпуск металла из печи сопряжён с такими рисками, как ожог расплавленным чугуном, разлетающимся при турбулентном выпуске металла из печи, и дефицит кислорода, вызванный выбросом оксида углерода, на заводе по изготовлению литейного чугуна существует опасная зона, в которой запрещено присутствие людей. Поэтому для измерения длины конкретного объекта и расстояния между объектами в опасной зоне эффективным является трёхмерное измерение по изображению с использованием камеры.
Список цитирования
Патентная литература
PTL 1: Публикация нерассмотренной заявки на патент Японии № 2006-258486.
PTL 2: Публикация нерассмотренной заявки на патент Японии № 2012-027000.
Сущность изобретения
Техническая проблема
Технология, описанная в патентной литературе 1, включает в себя этап формирования изображения два или более раз посредством перемещения одной камеры, и дополнительно требуется оборудование и механизмы для перемещения камеры, поэтому для применения этой технологии требуется много аппаратного обеспечения. Кроме того, поскольку формирование изображения необходимо выполнять два или более раз, количество фрагментов данных, обрабатываемых с помощью этой технологии, является большим, что приводит к сложности, и поэтому применение этой технологии является непростой задачей. Кроме того, поскольку измерение выполняется посредством триангуляции, вероятно возникновение ошибки, если расстояние между целевой точкой измерения и камерой является существенно большим по сравнению с расстоянием перемещения камеры. То есть эта технология не может быть реализована в том случае, когда расстояние до измеряемого объекта является большим, а место, где камера может быть установлена, является узким и, следовательно, не подходит для измерения положения объекта на заводе, где находится высокотемпературный объект, который может быть размещен в ограниченном месте, или где присутствует токсичный газ.
В соответствии с технологией, описанной в патентной литературе 2, координаты известных четырёх точек (однако следует обратить внимание, что любые три точки не находятся на одной и той же прямой линии) необходимо сохранить заранее, используя одну камеру, а положение и угол камеры должны быть рассчитаны по координатам. Следовательно, технология не может быть применена до тех пор, пока не подготовлены по меньшей мере четыре известные точки.
Настоящее изобретение было выполнено с учётом вышеуказанного обстоятельства, и задачей настоящего изобретения является предложение способа, который позволяет измерить, по меньшей мере, по одному изображению, трёхмерное абсолютное положение точки измерения с удалённого положения, даже в опасной зоне, куда человек не может войти, и непосредственно измерить координаты с использованием средства измерения и т.п.
Решение проблемы
Средство для решения вышеуказанной проблемы заключается в следующем.
[1] Способ определения по изображению трёхмерного абсолютного положения точки измерения, находящейся в плоскости, включающей любые три точки на объекте, подлежащем измерению, с использованием трёхмерной ортогональной системы координат, при этом способ включает:
измерение относительного положения между точкой отсчета и камерой,
получение изображения посредством формирования изображения точки измерения с помощью указанной камеры,
вычисление на основе изображения трёхмерных координат относительного положения точки измерения с использованием положения объектива камеры в качестве начала координат и
вычисление трёхмерного абсолютного положения точки измерения на основе указанного относительного положения и указанных координат трёхмерного относительного положения.
[2] Способ согласно [1], в котором
плоскость является плоскостью, включающей две из трёх ортогональных осей указанной трёхмерной ортогональной системы координат.
[3] Способ согласно [1], в котором
точка измерения является точкой на текучей среде, находящейся в указанной плоскости.
[4] Способ согласно [2], в котором
точка измерения является точкой на текучей среде, находящейся в указанной плоскости.
[5] Способ определения положения расплавленного материала для определения трёхмерного абсолютного положения точки измерения на расплавленном материале, сливаемом из печи, имеющей в нижней части выпускное отверстие, через которое сливается расплавленный материал, с использованием способа по любому из [1] - [4].
Положительные эффекты изобретения
Согласно настоящему изобретению, можно определить трёхмерное абсолютное положение точки измерения по меньшей мере по одному изображению. Таким образом, можно легко измерить по изображению трёхмерное абсолютное положение измеряемого объекта с удалённого положения даже в том случае, когда измеряемый объект находится в опасной зоне, куда человек не может входить и непосредственно измерять координаты с использованием средства измерения и т.п., например, в зоне, где вытекает текучая среда, в зоне, где находится объект с высокой температурой, а также в зоне, где присутствует токсичный газ.
Краткое описание чертежей
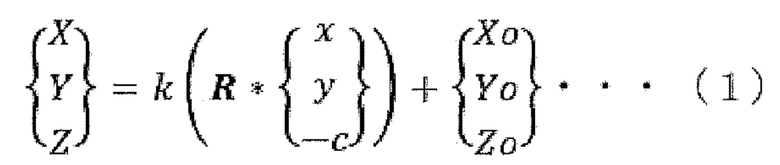
Фиг. 1 является схематическим видом, иллюстрирующим относительное положение между точкой P в трёхмерном пространстве и точкой P' в изображении в трёхмерном пространстве.
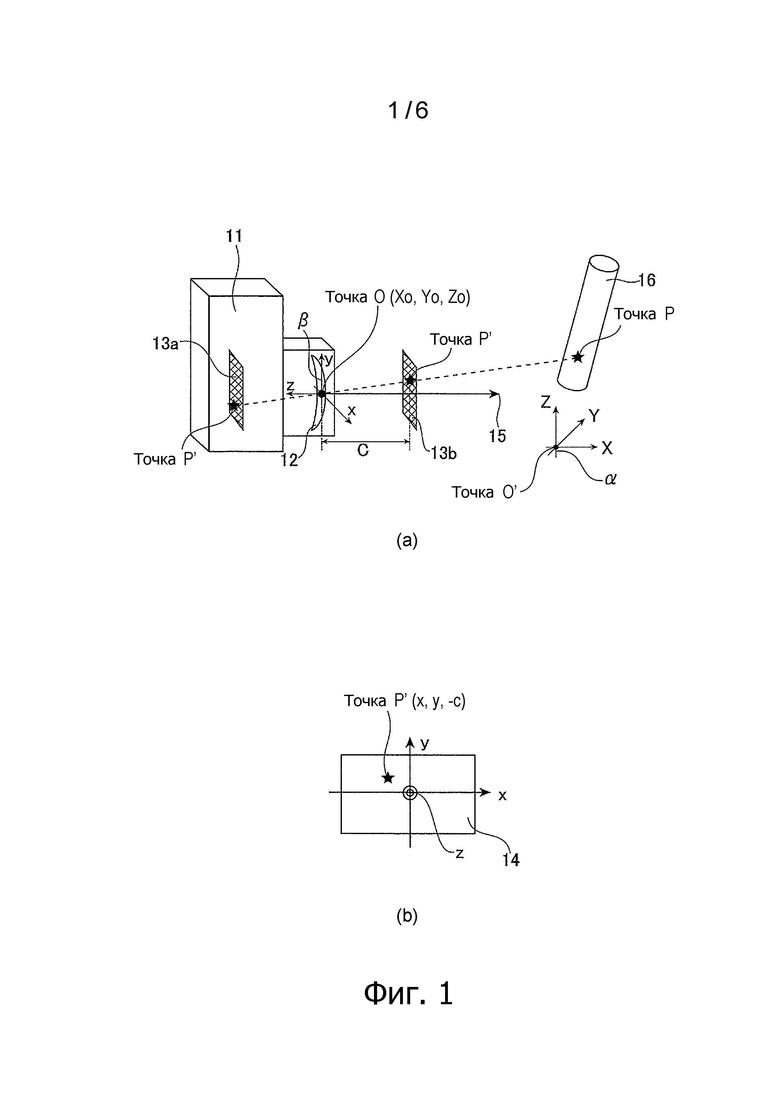
Фиг. 2 - фотография, показывающая устройство в целом из примера 1.
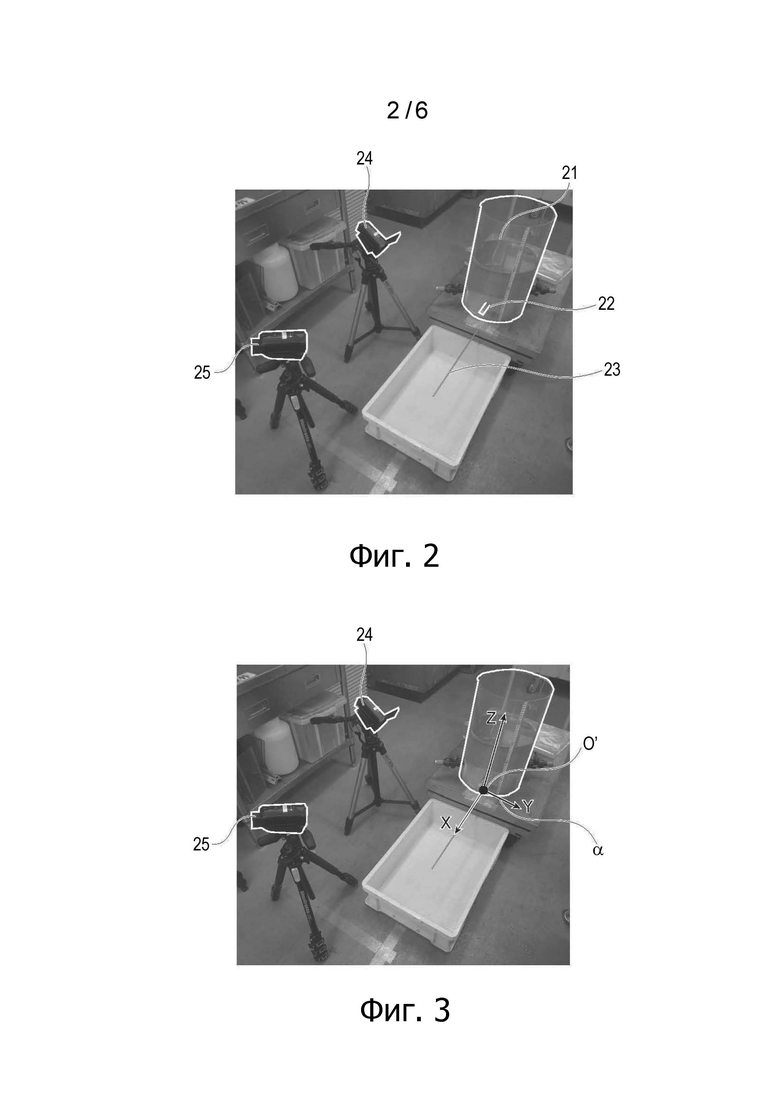
Фиг. 3 - фотография, показывающая трёхмерную абсолютную систему координат, заданную в примере 1.
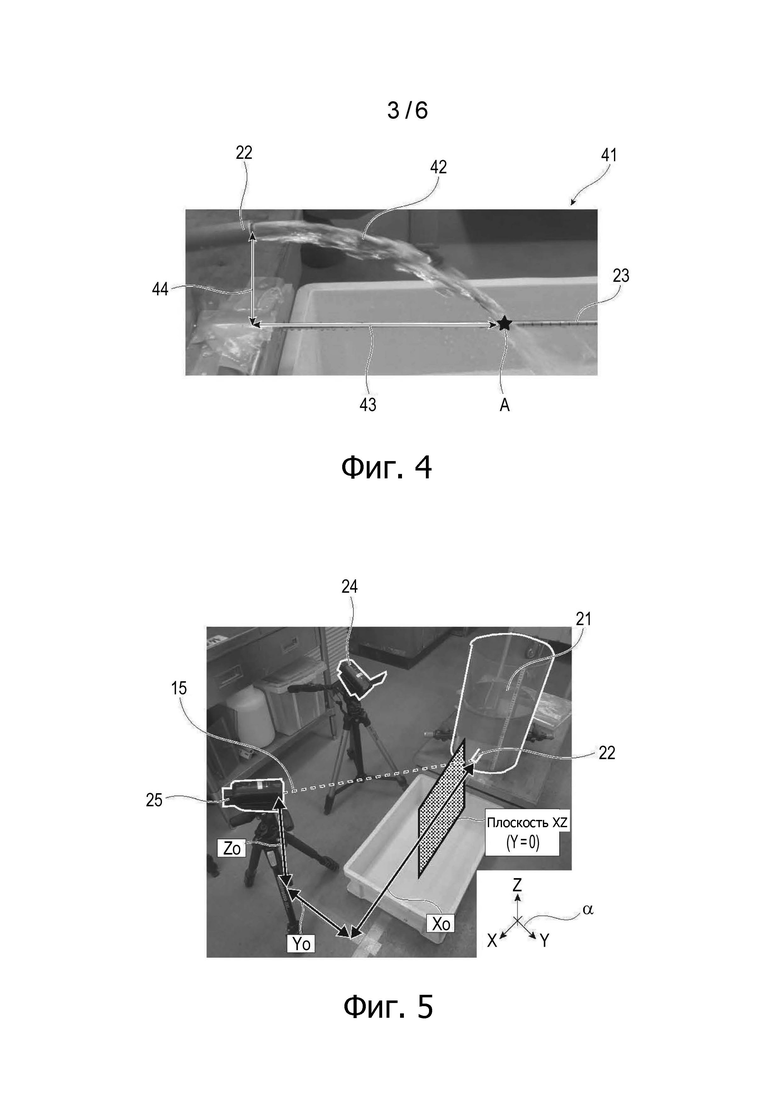
Фиг. 4 - фотография, показывающая изображение, снятое камерой 24 из Примера 1.
Фиг. 5 - фотография, показывающая относительное положение камеры 25 и выпускного отверстия 22 из Примера 1.
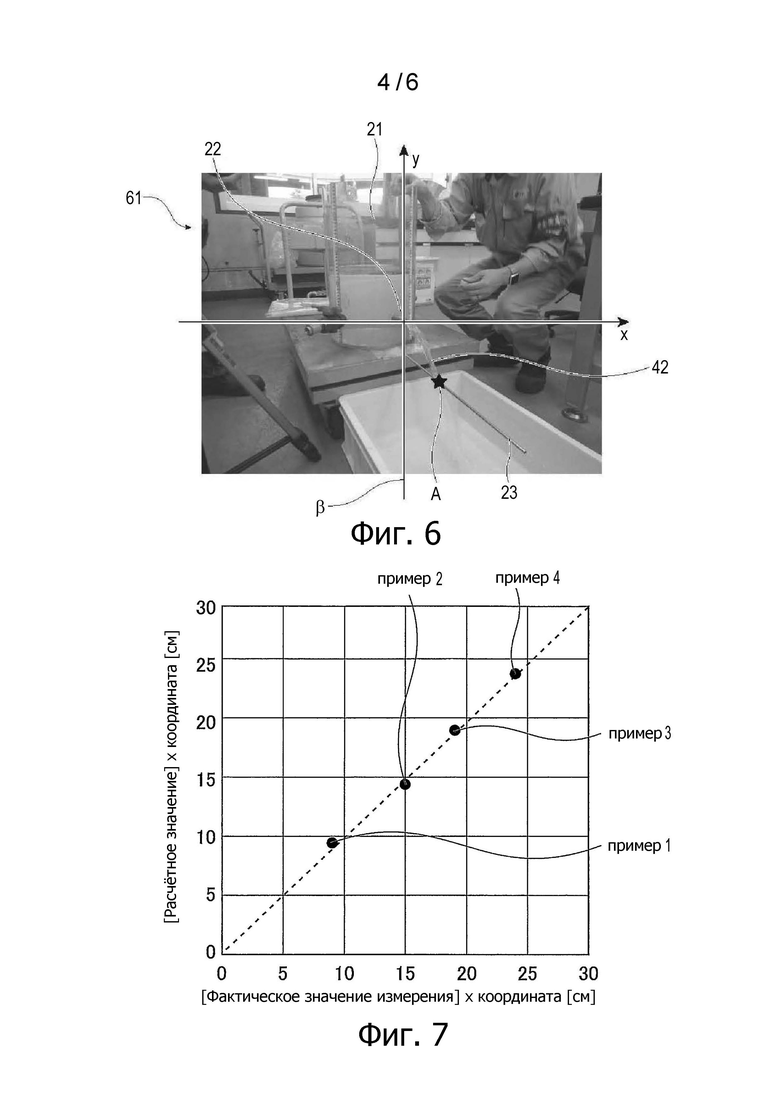
Фиг. 6 - фотография, показывающая изображение, снятое камерой 25 из Примера 1.
Фиг. 7 - график, сравнивающий фактические значения измерения и расчётные значения для координаты X измеряемой точки A.
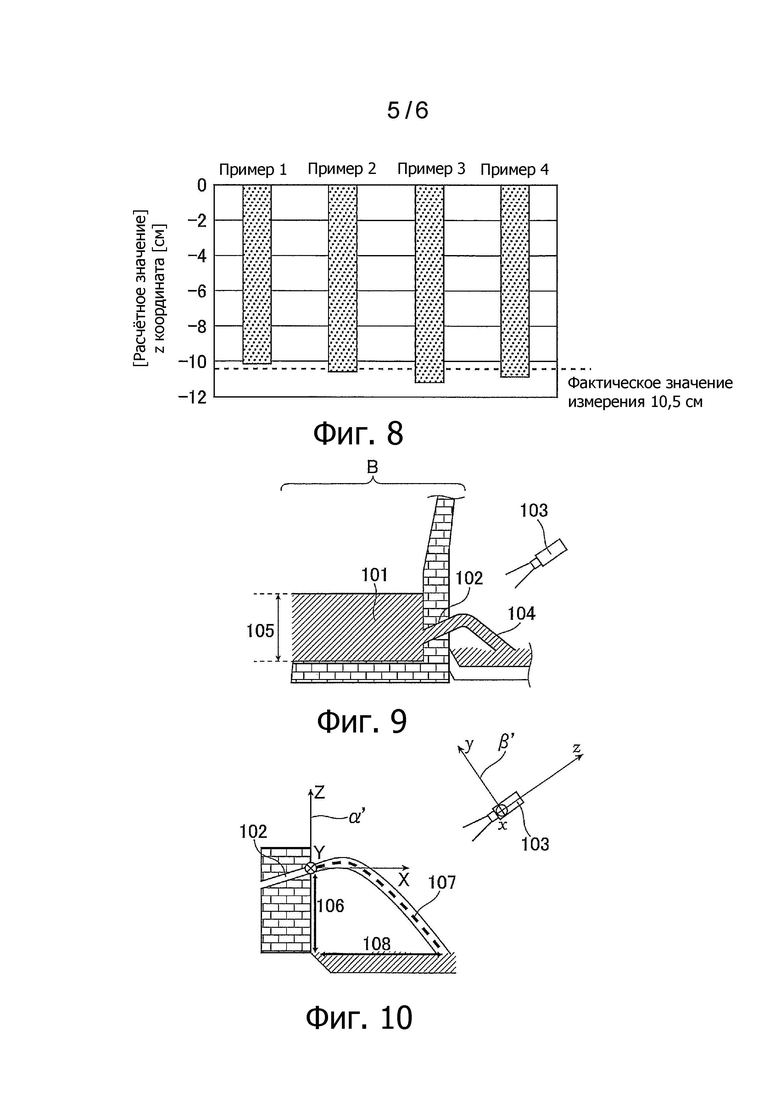
Фиг. 8 - график, сравнивающий фактические значения измерения и расчётные значения для координаты Z измеряемой точки А.
Фиг. 9 - фотография, показывающая оборудование из Примера 2.
Фиг. 10 - фотография, показывающая трёхмерную абсолютную систему координат, заданную в Примере 2.
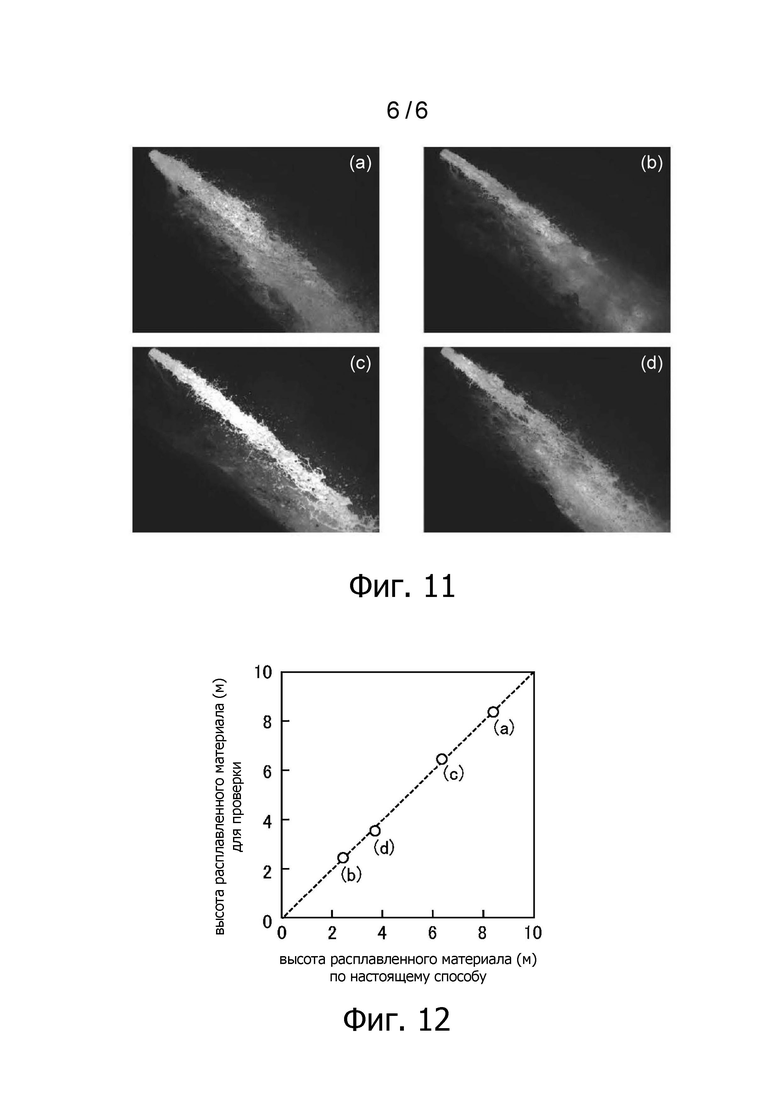
Фиг. 11(a)-(d) - фотографии, показывающие изображения, снятые камерой 103 из Примера 2.
Фиг. 12 - график, сравнивающий значения, полученные с помощью настоящей технологии, и значения для проверки, относящийся к высоте 105 расплавленного материала.
Описание вариантов осуществления изобретения
Далее описывается вариант осуществления настоящего изобретения.
Способ измерения по изображению
Фиг. 1 иллюстрирует относительное положение камеры и точки P измерения на объекте, подлежащем измерению. В дальнейшем описывается способ определения трёхмерного абсолютного положения измеряемого объекта 16, согласно настоящему изобретению, со ссылкой на фиг. 1.
Сначала камера устанавливается в месте, из которого может быть измерено относительное положение между точкой отсчета O' (0, 0, 0) и камерой, и измеряется положение точки отсчета O' и положение камеры. Этот этап является этапом измерения относительного положения между точкой отсчета и камерой. Несмотря на то, что точка отсчета О' может быть установлена в любом месте, как точка Р измерения, так и точка отсчета О' могут находиться в плоскости, включающей три точки на измеряемом объекте. Несмотря на то, что в настоящем описании для удобства описания точка отсчета O' является началом координат (0, 0, 0) абсолютной системы α координат, которая представляет собой трёхмерную ортогональную систему координат, как показано на фиг. 1(a), точка отсчета О' не ограничивается этим и может быть любой точкой в абсолютной системе α координат.
При измерении по изображению, в соответствии с настоящим изобретением, используется формула, выражающая относительное позиционное соотношение между точкой измерения на снятом изображении и камерой. Сначала камерой 11 снимается область (диапазон), включающая точку измерения. Это этап получения изображения. Точка P, снимаемая камерой 11, и центральная точка O (далее также называемая просто точкой O) объектива 12 камеры представлены таким образом, как показано на фиг. 1(a). Камера содержит датчик изображения, который улавливает свет, попадающий на объектив. Поскольку изображение, появляющееся на датчике 13а изображения, является перевернутым, предполагается, что перед объективом находится датчик 13b виртуального изображения, и на датчике 13b виртуального изображения появляется неперевернутое изображение. Координаты трёхмерного пространства, где находится точка P измерения на измеряемом объекте, могут быть определены с помощью любой абсолютной системы α координат. В описании настоящего варианта осуществления изобретения используется трёхмерная ортогональная система координат, началом которой является точка отсчета О', как описано выше. В абсолютной системе α координат положение центральной точки О объектива 12 представляется как (Xo, Yo, Zo) [м], а положение точки P объекта представляется как (X, Y, Z) [м].
Посредством формирования изображения с использованием камеры 11, показанной на фиг. 1(а), улавливается свет, который испускается из точки P и проходит через датчик 13b виртуального изображения, и, в результате, может быть получено изображение 14, проиллюстрированное на фиг. 1(b). Точка P, появляющаяся на изображении 14, определяется как точка P', при этом точка P' представляет собой пересечение сегмента OP и датчика 13b виртуального изображения, как проиллюстрировано на фиг. 1(a).
Когда фотографическая система β координат имеет плоскость xy, параллельную плоскости, образованной датчиком 13b виртуального изображения, имеет ось z в направлении, противоположном оптической оси 15 камеры, и имеет начало координат в положении объектива, которое определяется, как проиллюстрировано на фиг. 1(a), положение точки P' в фотографической системе β координат выражается как (x, y, -c) с использованием расстояния «c» между объективом 12 камеры и датчиком 13b виртуального изображения. При этом x, y являются координатами в фотографической системе β координат, полученными посредством преобразования единиц измерения координат точки P на изображении 14 из [пикселей] в [м] на основе размера датчика 13b виртуального изображения и разрешения изображения 14. Это этап вычисления - по изображению -трёхмерных координат относительного положения точки измерения с использованием положения объектива камеры в качестве начала координат. Размер элемента изображения и размер изображения можно выбирать свободно, а координаты точки измерения могут быть получены более точно по мере увеличения разрешения изображения.
Поскольку точка О, точка Р' и точка Р находятся на одной и той же прямой линии, как проиллюстрировано на фиг. 1(а), соотношение между этими точками может быть выражено формулой (1) исходя из условия коллинеарности.
[Мат. 1]
В формуле (1) k представляет любое действительное число. R представляет матрицу поворота 3×3 для преобразования фотографической системы β координат в абсолютную систему α координат и выражается формулой (2).
[Мат. 2]

Матрица R поворота, определенная формулой (2), представляет собой матрицу поворота, полученную, когда оси x, y и z фотографической системы β координат поворачиваются в порядке z, y и x на κ, ϕ и ω. [рад] соответственно таким образом, чтобы фотографическая система β координат соответствовала абсолютной системе α координат. В настоящем изобретении поворот вокруг оси по часовой стрелке называется положительным поворотом. Матрица R поворота, выраженная формулой (2), является всего лишь примером, и поэтому порядок поворота осей может быть изменён, или одна и та же ось может быть повёрнута два или более раз до тех пор, пока фотографическая система β координат и абсолютная система α координат не будут совпадать. Формула (1) представляет собой формулу, имеющую три компонента, и когда параметр k, включённый в формулы компонентов x, y, удаляется с помощью формулы компонента z, могут быть выведены такие формулы, как следующие формулы (3 - x) и (3 - y).
[Мат. 3]

[Мат. 4]

(X, Y, Z) [m] - трёхмерные абсолютные координаты точки P. Две формулы (3 - x) и (3 - y) содержат три неизвестных числа X, Y и Z, и ещё одна формула необходима для того, чтобы однозначно определить эти числа. В том случае, когда точка P, которая является точкой измерения, находится в плоскости, включающей любые три точки на измеряемом объекте, уравнение F плоскости, в которой находится точка P, такое как формула (4), можно использовать как условие.
F (Х, Y, Z) = 0 … (4)
При добавлении формулы (4), может быть найдено относительное положение между точкой P и камерой.
Этап получения изображения посредством формирования изображения с использованием камеры и этап вычисления трёхмерных координат относительного положения с использованием положения объектива камеры в качестве начала координат могут выполняться перед этапом вычисления относительного положения между точкой отсчета O' и камерой, или могут выполняться после этапа вычисления относительного положения между точкой отсчета О' и камерой.
В дополнение к формулам (3 - x) и (3 - y) и формуле (4), x, y и c, которые представляют трёхмерные координаты относительного положения, при использовании положения объектива камеры в качестве начала координат, являются известными значениями, и поэтому необходимо только найти решения для трех формул с тремя неизвестными. Таким образом, могут быть определены однозначно X, Y и Z, которые представляют искомое трёхмерное абсолютное положение. Вышеупомянутое представляет собой этап вычисления трёхмерного абсолютного положения объекта, подлежащего измерению, исходя из относительного положения между точкой отсчета О' и камерой, а также вычисления трёхмерных координат относительного положения точки измерения с использованием положения объектива камеры в качестве начала координат.
В настоящем изобретении информация о положении (относительное положение между точкой отсчета и камерой) в трёхмерной системе координат используется для вычисления параметров, используемых в матрице поворота. Однако в том случае, когда подставка для камеры, такая как штатив, с помощью которой можно проверить положение установки камеры, не используется, иногда бывает трудно получить какую-либо одну из трёхмерных координат. В этом случае необходимо только измерить расстояние между точкой отсчета и положением камеры с помощью лазерного дальномера или подобного устройства, а затем геометрически найти координаты оси, которые не были получены из трёхмерных координат положения установки камеры и расстояния. Угол камеры в настоящем изобретении относится к углу формирования изображения камерой - углу относительно точки в плоскости, где находится измеряемый объект.
Плоскость, в которой находятся обе точки: точка P, которая является точкой измерения, и точка отсчета O', предпочтительно представляет собой плоскость, включающую две из трёх ортогональных осей трёхмерной ортогональной системы координат. Это связано с тем, что в том случае, когда плоскость, в которой находятся точка P, являющаяся точкой измерения, и точка отсчета O', представляет собой плоскость, включающую две из трёх ортогональных осей трёхмерной ортогональной системы координат, координаты, которые необходимо найти, представляют точку в двумерной ортогональной системе координат, и координаты точки измерения могут быть найдены более легко.
Кроме того, точка измерения, подлежащая измерению в настоящем изобретении, предпочтительно представляет собой точку на текучей среде, которая находится в плоскости, включающей три любые точки на объекте, подлежащем измерению. Это связано с тем, что выброшенная в воздух текучая среда образует параболу в той же плоскости в случае, когда не приложена сила с составляющей, перпендикулярной направлению силы тяжести, и поэтому координаты точки измерения на этой текучей среде можно легко найти таким образом, как описано выше. Кроме того, объектом измерения в настоящем изобретении предпочтительно является расплавленный материал, сливаемый из печи, имеющей в нижней части выпускное отверстие, через которое сливается расплавленный материал, а точкой измерения предпочтительно является точка на расплавленном материале. То есть предпочтительно обеспечить способ определения положения расплавленного материала, заключающийся в определении положения расплавленного материала с использованием способа измерения абсолютного положения согласно настоящему изобретению. Это связано с тем, что не только получают возможность легко найти координаты точки измерения на текучей среде, поскольку расплавленный материал, сливаемый из печи, является текучей средой, но также получают возможность измерения координат с использованием изображения из удалённого положения, снятого даже в опасной зоне, куда человек не может войти и непосредственно измерить координаты с использованием измерительных средств и т.п., поскольку расплавленный материал имеет высокую температуру.
Примеры
Пример 1
Для подтверждения технической пригодности настоящего изобретения был проведён проверочный эксперимент. Фиг. 2 иллюстрирует, как проводился проверочный эксперимент. В эксперименте выпуск металла из доменной печи моделировался с использованием упрощённой модели 21 выпуска металла (далее также называется просто моделью), созданной посредством формирования выпускного отверстия 22, через которое может сливаться жидкость, в цилиндрическом пластиковом контейнере, моделирующем доменную печь. Непосредственно под выпускным отверстием 22 была прикреплена планка 23 (далее также называется просто планкой) с заданной шкалой, отметки которой нанесены с постоянными интервалами. В ходе эксперимента формирование изображений осуществлялось с помощью двух камер 24 и 25.
Точка, в которой жидкость, вытекающая через выпускное отверстие 22, попадала на планку 23, считывалась по указанной шкале на изображении, снятом с помощью камеры 24, и полученные таким образом фактические значения измерения трёхмерных координат сравнивались с расчётными значениями, полученными в соответствии с настоящим изобретением.
В эксперименте трёхмерная абсолютная система α координат была установлена таким образом, как проиллюстрировано на фиг. 3. Точка отсчета О' абсолютной системы α координат была установлена на выходе выпускного отверстия 22. Ось X была установлена параллельно планке 23, таким образом, чтобы направление от модели 21 к выходу выпускного отверстия 22 было положительным направлением. Ось Y была установлена таким образом, чтобы плоскость XY была параллельна земле, а ось Z была установлена с направлением вверх.
Далее описывается способ определения трёхмерных координат точки А измерения, которая является точкой на текучей среде, с использованием изображения, полученного с камеры 24 в этом эксперименте. Фиг. 4 иллюстрирует часть изображения, полученного камерой 24 в этом эксперименте. Изображение 41 может быть получено посредством формирования изображения сбоку от выпускного потока 42 жидкости, сливаемой из модели 21, с использованием камеры 24. Как проиллюстрировано на фиг. 3 и 4, планка 23 и ось X были установлены параллельно друг другу, а ось Z была установлена таким образом, чтобы она проходила вертикально от выпускного отверстия 22 в направлении, перпендикулярном оси X. Выпускное отверстие 22 было расположено в плоскости XZ, а направление выпускного отверстия было отрегулировано таким образом, чтобы выпускной поток 42 всегда находился в плоскости Y = 0. Поскольку точка A измерения находится в плоскости Y = 0, расстояние 43 пролёта выпускаемого потока можно измерить с помощью планки 23 на изображении 41. Кроме того, когда дополнительно измерена высота 44 выпускного отверстия, могут быть получены трёхмерные координаты точки А измерения. Полученные таким образом значения считаются фактическими значениями измерения.
Ниже описывается, как настоящее изобретение было применено в эксперименте в отношении точки А измерения.
Метод, соответствующий настоящему изобретению, применяется посредством формирования изображения выпускного потока 42 с помощью камеры 25. Фиг. 5 иллюстрирует взаимное расположение камеры 25 и выпускного отверстия 22 модели 21. Координаты камеры 25 в абсолютной системе α координат представляют собой (Xo, Yo, Zo) [м], и координаты точки О' выхода выпускного отверстия 22 - (0, 0, 0). Сначала в эксперименте точно измерялись Xo, Yo, Zo, в соответствии с заданной абсолютной системой α координат, и таким образом были получены координаты камеры 25. Угол камеры 25 был установлен таким образом, чтобы оптическая ось камеры пересекала выпускное отверстие 22. Фиг. 6 иллюстрирует изображение 61, полученное с помощью камеры 25. Определяют относительное положение между точкой O' (0, 0, 0) и ( Xo, Yo, Zo), и фотографическую систему β координат поворачивают вокруг оси x, оси y и оси z таким образом, чтобы ось x фотографической системы β координат была выровнена с осью X абсолютной системы α координат, ось y фотографической системы β координат была выровнена с осью Y абсолютной системы α координат и ось z фотографической системы β координат была выровнена с осью Z абсолютной системы α координат. Порядок поворота осей может быть изменён, или одна и та же ось может быть повёрнута два или более раз, при условии, что фотографическая система β координат и абсолютная система α координат выровнены. В частности, ось z фотографической системы β координат сначала поворачивается на κ1, затем ось y поворачивается на ϕ. Наконец, ось z снова поворачивается на κ2, в результате чего фотографическая система β координат выровнена с абсолютной системой α координат, и, таким образом, получается матрица R поворота. Матрица R поворота в этом эксперименте выражается формулой (5).
[Мат. 5]

Расстояние c между объективом камеры 25 и датчиком изображения было найдено заранее. В таблице 1 показаны параметры, использованные в этом эксперименте.
Таблица 1
Следующая формула (6) может использоваться как условие в случае, когда плоскость имеет две из трёх осей абсолютных координат (плоскость с осями XZ в настоящем Примере).
Y = 0 … (6)
Далее рассчитывались координаты (x, y, -c) точки А измерения в фотографической системе β координат исходя из изображения, полученного с помощью камеры 25, включающего плоскость Y = 0, которая включает три любые точки на выпускном потоке 42, и точку А измерения.
В этом измерении использовалась камера с размером элемента изображения 6,2 мм × 4,6 мм и размером изображения 4608 × 3456 пикселей.
Система квадратных уравнений X и Z была выведена путем подстановки параметров таблицы 1, Y = 0 и координат (x, y, -c) точки A в формулы (3 - x) и (3 - y), и были вычислены координаты (X, 0, Z) точки A в абсолютной системе α координат.
Координаты точки А измерения определялись четыре раза указанным выше способом вычисления при изменении количества жидкости, залитой в модель 21, и эти измерения рассматривались как примеры 1 - 4. Фиг. 7 и 8 иллюстрируют результаты сравнения расчётных значений, определенных с помощью предложенной технологии, и фактических значений измерений. По результатам можно увидеть, что расчётные значения и фактические значения измерений совпадают. Это показывает техническую применимость настоящего изобретения.
Пример 2
В примере 2 предпринимается попытка определения высоты 105 расплавленного материала, слитого из печи B, с использованием настоящего метода. Следует обратить внимание, что высота 105 расплавленного материала относится к высоте от дна печи до верхней поверхности расплавленного материала в печи B. Способ, реализованный в примере 2, описан с использованием фиг. 9. Печь B имеет объем приблизительно 5000 м3 и имеет в своей нижней части жидкую ванну 101 с расплавленным материалом и выпускное отверстие 102, через которое расплавленный материал выводится из печи B. Когда расплавленный материал вытекает через выпускное отверстие 102, поток 104 расплавленного материала образует параболическую форму и он снимается камерой 103, установленной рядом с печью B. Положение и угол камеры 103 в абсолютных координатах известны. В примере 2, как проиллюстрировано на фиг. 10, поток 104 расплавленного материала отображается камерой 103, и настоящий метод применяется к изображению, фиксирующему поток 104 расплавленного материала, в качестве объекта для определения координат положения на потоке 104 расплавленного материала. Затем находится уравнение параболы 107 потока 104 расплавленного материала, проиллюстрированное на фиг. 10, и из уравнения поэтапно находятся скорость вытекания расплавленного материала и высота 105 расплавленного материала. Найденная таким образом высота 105 расплавленного материала и высота 105 расплавленного материала, геометрически найденная посредством фактического измерения, сравниваются, и тем самым проверяется способ определения координат положения, соответствующий настоящему методу. В примере 2 предполагалось, что абсолютная система α' координат имеет точку отсчета на выпускном отверстии 102, имеет ось Z, направленную вверх относительно горизонтальной плоскости, а поток 104 расплавленного материала всегда находится в плоскости XZ. В этом случае уравнение параболы 107 задаётся формулой (7) с использованием ускорения свободного падения g (м/с2), скорости выпуска vtap (м/с) расплавленного материала, и угла выпуска θtap (рад) расплавленного материала по принципу, аналогичному принципу траектории, нарисованной проецируемым объектом.
[Мат. 6]

С другой стороны, парабола, проходящая через точку отсчета координат (0, 0) в плоскости XZ, задаётся формулой (8) с использованием констант a и b.
Z = аХ2 + bХ… (8)
Поскольку в формуле (8) неизвестны два числа, а именно константы a и b, то эти числа могут быть вычислены, если известны координаты X и Z двух точек параболы. В примере 2 абсолютные координаты (X, 0, Z) двух точек параболы находятся из координат двух точек в фотографической системе β' координат и формулы (5) с использованием настоящего метода, константы a и b формулы (8) рассчитываются по абсолютным координатам двух точек, а скорость вытекания и угол вытекания расплавленного материала рассчитываются по константам a и b и формуле (7). Затем высота 105 расплавленного материала определяется по скорости вытекания расплавленного материала, найденной таким образом, согласно формулам (7) - (10), описанным в патенте Японии № 07056813.
Было выполнено сравнение высоты 105 расплавленного материала, определённого вышеуказанным способом, и значения высоты 105 расплавленного материала, рассчитанной на основе скорости вытекания, геометрически найденной из расстояния 108 вытекания потока 104 расплавленного материала и высоты 106 выпускного отверстия. Способ, раскрытый в патенте Японии № 07056813, также использовался для определения высоты 105 расплавленного материала по расстоянию 108 вытекания и высоте 106 выпускного отверстия.
Конкретный способ определения высоты 105 расплавленного материала описан ниже. Настоящий метод был применен к фотографиям, представленным на фиг. 11(a) - (d), снятым с помощью камеры 103. Все изображения, показанные на фиг. 11, имеют размер 2064 пикселей × 1544 пикселей. На фиг. 11 поток 104 расплавленного материала, обозначенный белым цветом, снят в качестве объекта, и расплавленный материал, сливаемый из печи B, накапливается под потоком 104 расплавленного материала. На фиг. 11 положения потока 104 расплавленного материала в абсолютных координатах были найдены путем подстановки в формулу (5) двух точек на потоке 104 расплавленного материала, находящихся: в положении, координата x которого в фотографической системе β' координат составляет -732 пикселя, и в положении, координата x которого в фотографической системе β' координат составляет -32 пикселя. Константы a и b были найдены путем подстановки указанных значений в формулу (8) и решения системы уравнений. Следует обратить внимание, что изображения, показанные на фиг. 11(a) - (d) были сняты в разные моменты времени, и угол камеры проверялся каждый раз, когда было снято изображение, чтобы минимизировать внешнее влияние, вызванное течением времени и заводскими операциями, и повысить точность настоящего метода. В таблице 2 показаны параметры, используемые для обработки изображения в Примере 2, а в таблице 3 показаны параметры, используемые для вычисления высоты 105 расплавленного материала, фотографических координат и абсолютных координат двух точек в (a) - (d).
Таблица 2
Таблица 3
-0,025)
-0,025)
-0,025)
-0,025)
-0,025)
-0,025)
-0,025)
-0,025)
0, 0,0868)
0, 0,113)
0, 0,145)
0, 0,140)
0, 0,0291)
0, 0,111)
0, 0,0774)
0, 0,114)
Уравнение параболы 107 потока 104 расплавленного материала было найдено из фиг. 11(a) - (d), которые являются изображениями, полученными с помощью камеры 103, с использованием параметров, показанных в таблице 2. Фиг. 12 иллюстрирует результаты (ВЫСОТА РАСПЛАВЛЕННОГО МАТЕРИАЛА (м) ПО НАСТОЯЩЕМУ СПОСОБУ, горизонтальная ось) определения высоты 105 расплавленного материала исходя из параметров, приведенных в таблице 3, с использованием настоящего способа, а также результаты вычисления (ВЫСОТА РАСПЛАВЛЕННОГО МАТЕРИАЛА (м) ДЛЯ ПРОВЕРКИ, вертикальная ось) высоты 105 расплавленного материала, рассчитанного на основе скорости слива, геометрически найденного по расстоянию 108 вытекания и высоте 106 выпускного отверстия. Как ясно видно из фиг. 12, оба результата практически совпадают. Таким образом, подтверждена техническая применимость способа определения абсолютного положения по изображению в соответствии с настоящим методом.
Список ссылочных позиций:
11 - камера;
12 - объектив камеры;
13а - датчик изображения;
13b - датчик виртуального изображения;
14 – изображение;
15 - оптическая ось камеры;
16 - измеряемый объект;
21 - упрощённая модель выпуска;
22 - выпускное отверстие;
23 - планка с отметками заданной шкалы;
24 - камера (для измерения фактического значения измерения);
25 - камера (для реализации настоящего метода);
41 – изображение;
42 - выпускной поток;
43 - расстояние пролёта выпускного потока;
44 - высота выпускного отверстия;
А - точка измерения;
61 – изображение;
101 - жидкая ванна расплавленного материала;
102 - выпускное отверстие;
103 – камера;
104 - поток расплавленного материала;
105 - высота расплавленного материала;
106 - высота выпускного отверстия;
107 - парабола потока расплавленного материала;
108 - расстояние вытекания;
В - печь;
α - абсолютная система координат;
β - фотографическая система координат;
α' - абсолютная система координат (Пример 2);
β' - фотографическая система координат (Пример 2).
Изобретение относится к технологии измерения трёхмерного абсолютного положения измеряемой точки на объекте, измеряемом с использованием изображения. Способ определения положения измеряемого объекта посредством определения по изображению трёхмерного абсолютного положения точки измерения, находящейся на данном объекте, с использованием трёхмерной ортогональной системы координат включает в себя этапы, на которых: измеряют с помощью измерительного устройства относительное положение между точкой отсчета и камерой, при этом точка отсчета расположена в той же плоскости, что и точка измерения, и указанная плоскость представляет собой плоскость, включающую две из трех ортогональных осей трехмерной ортогональной системы координат; получают изображение с помощью камеры; на основе изображения вычисляют трёхмерные координаты относительного положения точки измерения с использованием положения объектива указанной камеры в качестве начала координат и вычисляют трёхмерное абсолютное положение точки измерения на основе указанного относительного положения и указанных трёхмерных координат относительного положения. При этом точка измерения является точкой на текучей среде, а именно расплавленном материале. Технический результат - возможность определения трёхмерного абсолютного положение измеряемого объекта с удалённого положения, когда измеряемый объект находится в опасной зоне, например в зоне, где находится объект с высокой температурой или где присутствует токсичный газ. 2 н. и 1 з.п. ф-лы, 12 ил., 3 табл.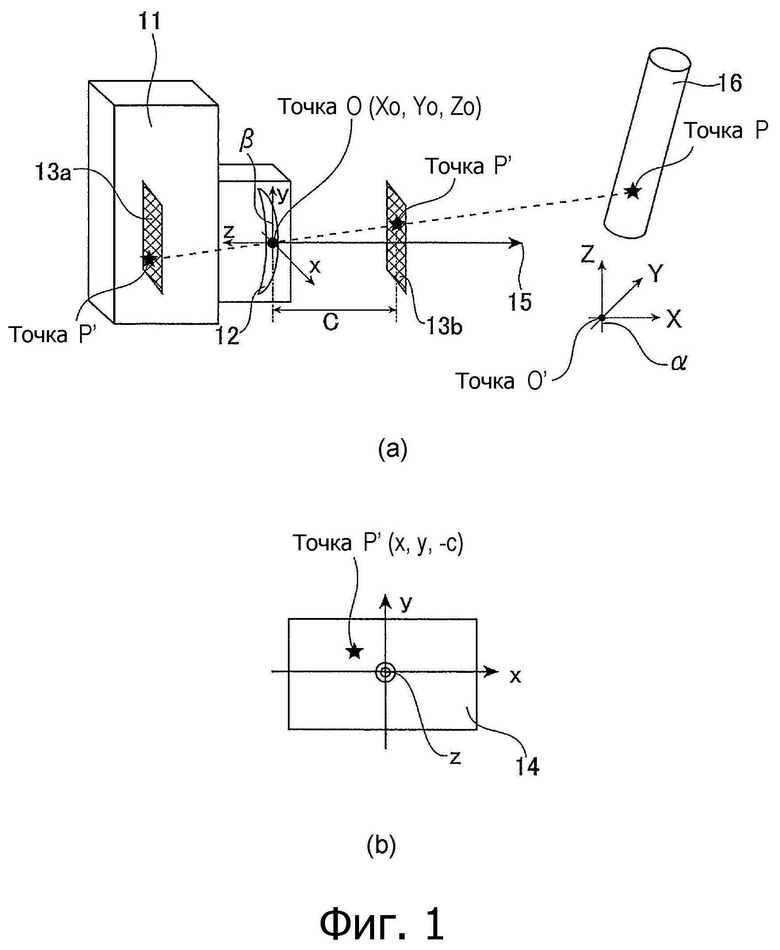
1. Способ определения положения измеряемого объекта посредством определения по изображению трёхмерного абсолютного положения точки измерения, находящейся на данном объекте, подлежащем измерению, с использованием трёхмерной ортогональной системы координат, характеризующийся тем, что
измеряют с помощью измерительного устройства относительное положение между точкой отсчета и камерой, при этом точка отсчета расположена в той же плоскости, что и точка измерения, и указанная плоскость представляет собой плоскость, включающую две из трех ортогональных осей трехмерной ортогональной системы координат,
получают изображение посредством формирования изображения точки измерения с помощью указанной камеры,
на основе указанного изображения вычисляют трёхмерные координаты относительного положения точки измерения с использованием положения объектива указанной камеры в качестве начала координат и
вычисляют трёхмерное абсолютное положение точки измерения на основе указанного относительного положения и указанных трёхмерных координат относительного положения.
2. Способ по п. 1, в котором
точка измерения является точкой на текучей среде, находящейся в указанной плоскости.
3. Способ определения положения расплавленного материала по изображению трёхмерного абсолютного положения точки измерения, находящейся на данном расплавленном материале, сливаемом из печи, имеющей в нижней части выпускное отверстие, через которое сливается расплавленный материал, характеризующийся тем, что используют способ по п. 1 или 2.
| Mallick S | |||
| Geometry of Image Formation //Learn OpenCV | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| - N | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - С | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| [Электронный ресурс] // URL: https://web.archive.org/web/20210802025129/https://learnopencv.com/geometry-of-image-formation/ Дата выкладки в сеть интернет: 02.08.2021 (дата обращения: 06.12.2024) | |||
| Способ измерений координат точек объекта в пространстве | 2020 |
|
RU2749654C1 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1998 |
|
RU2193798C2 |
| Способ регулирования процесса вращательного бурения | 1984 |
|
SU1252480A1 |

