1C
to
Изобретение относится к подъемно-транспортному оборудованию и может быть использовано на подвесных конвейерах.
Цель изобретения - повышение надежности устройства в работе.
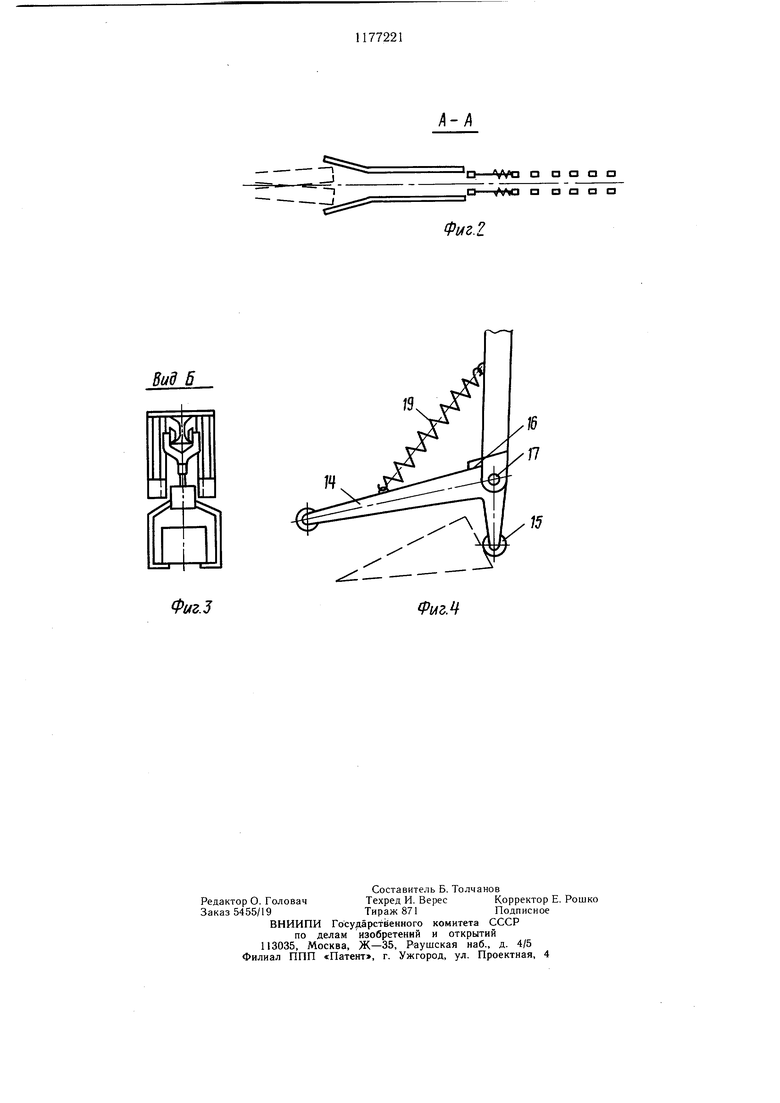
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг.; на фиг. 4 - подпружиненный двуплечий рычаг механизма ориентации захвата в горизонтальной плоскости.
Устройство состоит из грузового захвата 1, несущего груз 2. Захват 1 имеет опорную площадку 3, закрепленную в его верхней части, и через траверсу 4 с помощью щарнирного соединения 5 связан с тележками 6. Последние соединены между собой цепью 7 и установлены на монорельсе 8. На-месте разгрузки захвата 1 к монорельсу 8 крепится механизм ориентации захвата в вертикальной плоскости, состоящий из укрепленного на монорельсе 8 основания 9 со стойками 10, на концах которых закреплены копиры 11 и 12.
Непосредственно за механизмом ориентации захвата в вертикальной плоскости на монорельсе 8 крепится механизм ориентации захвата в горизонтальной плоскости, состоящий из закрепленного на монорельсе основания 13, на котором подвешены двуплечие Г-образные рычаги 14, имеющие на концах коротких и длинных плеч ролики 15 и упирающиеся основаниями длинных рычагов в упоры 16. Рычаги через щарниры 17 связаны с опорами 18, на которых закреплены пружины 19, удерживающие рычаги во взведенном состоянии. Опоры 18 крепятся к основанию 13. За рычагами с опорами 18 установлены выравнивающие роликовые опоры в виде закрепленных на основании 13 стоек 20 с роликами 21, выставленными на одном уровне с роликами коротких плечей рычагов 14.
Устройство работает следующим образом. Груз 2 захватывается грузовым захватом 1. Ввиду отсутствия точной центровки груза (груз может быть любой конфигурации) возможны перекосы захвата I как в горизонтальной, так и в вертикальной плоскостях (не препятствующие значительным отклонениям захвата в горизонтальной плоскости) вдоль оси щарнира 5, перпендикулярно траверсе 4.
При подходе к месту разгрузки за.ват 1 опорной площадкой 3 попадает между копирами 11 и 12 механизма ориентации захвата в вертикальной плоскости, где происходит строгое выравнивание захвата (копиры 11 и 12 направляют опорную площадку 3 и, следовательно, захват 1 с грузом 2 строго вдоль монорельса 8).
В случае, если центр тяжести груза 2 лежит справа от оси симметрии захвата 1
и угол между опорной площадкой 3 и направлением движения захвата положителен (совпадает с направлением движения часовой стрелки), переднйя кромка опорной площадки 3 после прохождения копиров 11 и 12 проходит (не задев двуплечего рычага 14) вперед, и опорная площадка 3 захвата 1 попадает под воздействие роликов 21 стоек 20, жестко связанных с основанием механизма 13. Передние ролики 21 стоек 20, расположенные на одном уровне, заставляют захват I поворачиваться вокруг щарнира 5 и прижиматься опорной площадкой 3 к поверхности остальных роликов 21. Выравненный ранее копирами 11 и 12 захват принимает положение, строго ориентированное в плоскости, вырисовываемой
роликами 21 стоек 20. Захват готов к разгрузке.
В случае, если центр тяжести груза 2 лежит слева от оси симметрии захвата 1, а передняя кромка опорной площадки 3 лежит выще уровня опорной площадки захвата, после прохождения копиров 11 и 12 захват передней частью опорной площадки 3 упирается в короткое плечо рычага 14.
Рычаг 14 поворачивается вокруг оси щар5 нира 17 и, своим длинным плечом воздействуя на опорную площадку 3, поворачивает захват 1 вокруг оси щарнира 5 так, что опорная площадка 3 проходит под роликом короткого плеча рычага 14 и при дальнейщем движении захвата оказывается
0 под роликами 21 стоек 20. Происходит выравнивание захвата, аналогичное описанному. Захват готов к разгрузке.
После прохождения передней кромки опорной площадки 3 ролика короткого плеча
с рычага 14 пружина 18, сжимаясь, поднимает длинное плечо рычага 14 и, прижав его к упору 16, возвращает в исходное положение.
D-V№ a 0 a a 0
a a a a a
Фиг2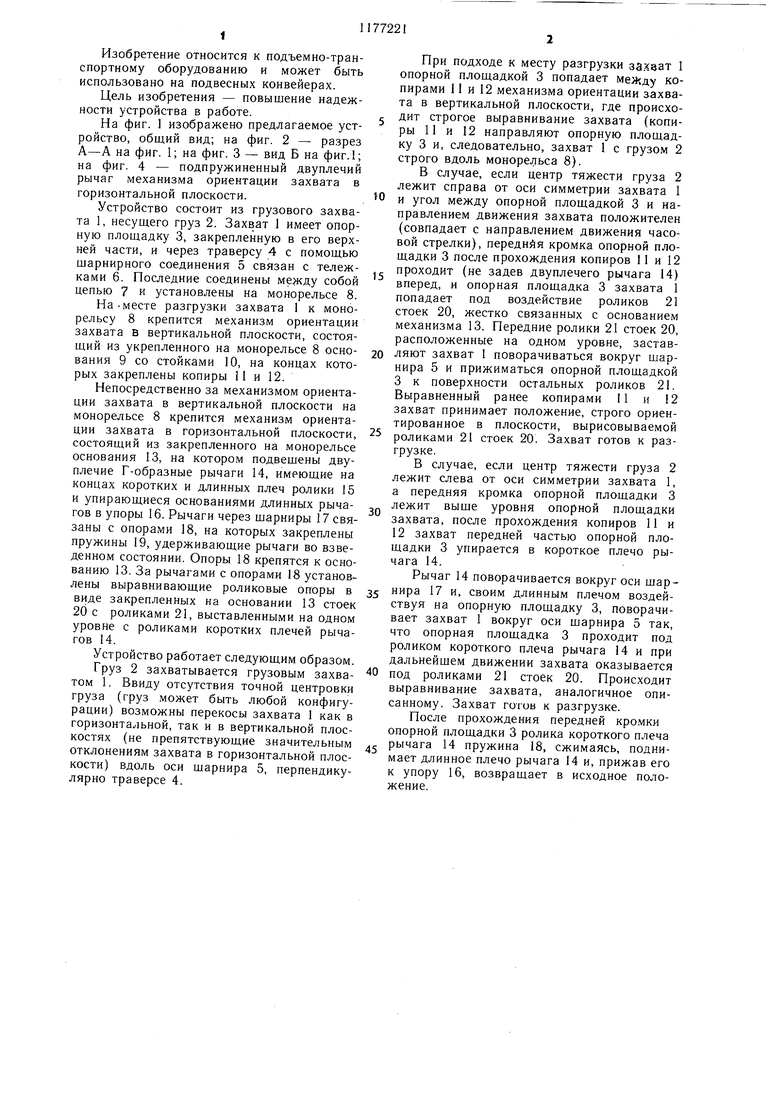
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной грузонесущий конвейер | 1986 |
|
SU1473256A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Устройство для разгрузки контейнеров | 1983 |
|
SU1159864A1 |
| Устройство для транспортирования изделий | 1958 |
|
SU115267A1 |
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО | 1965 |
|
SU176824A1 |
| Устройство для сборки и сварки полувагонов | 1982 |
|
SU1276473A1 |
| Автомобилеразгрузчик | 1987 |
|
SU1521687A1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| Координатный кормораздатчик | 1982 |
|
SU1130287A1 |
УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ И ИХ РАЗГРУЗКИ, содержашее установленные на монорельсе тележки с шарнирно установленными захватами и смонтированный в месте разгрузки механизм ориентации захвата в вертикальной плоскости, выполненный в виде прикрепленных к монорельсу через стойки копиров, отличающееся тем, что, с целью повышения надежности его в работе, оно снабжено механизмом ориентации захвата в горизонтальной плоскости, размещенным за механизмом ориентации захвата в вертикальной плоскости, при этом захват снабжен опорной площадкой, а механизм ориентации захвата в горизонтальной плоскости выполнен в виде установленных на монорельсе с возможностью взаимодействия с опорной площадкой захвата подпружиненных двуплечих Г-образных рычагов с роликами по концам и размещенных за ними выравнивающих роликовых опор. 
Sud 6
Фиг.З
fPlAZM
| Устройство для транспортировки грузов с автоматической разгрузкой | 1976 |
|
SU776954A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для ориентации подвесок конвейера | 1982 |
|
SU1025602A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
