I 1
Изобретение относится к промышленному транспорту, а иментю к внутрицеховому транспорту, и может быть использовано в гибких автоматизированных линиях.
Цель изобретения - повышение эффективности путем уменьшения продолжительности цикла перегрузки груза.
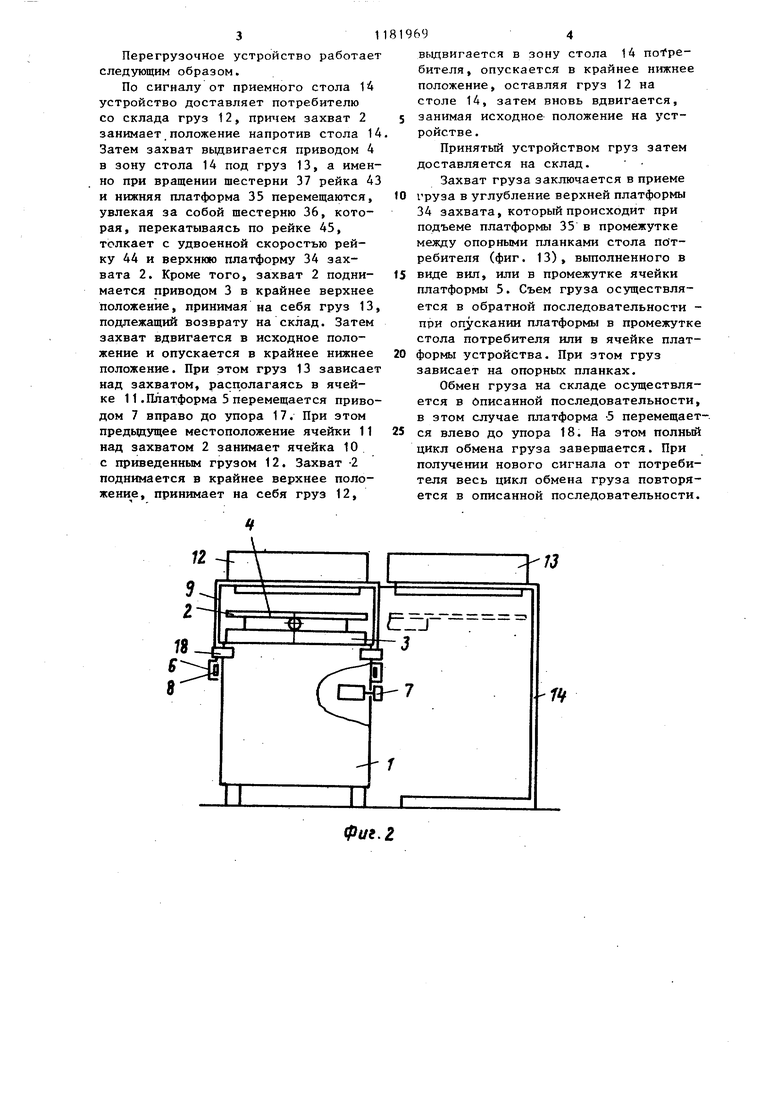
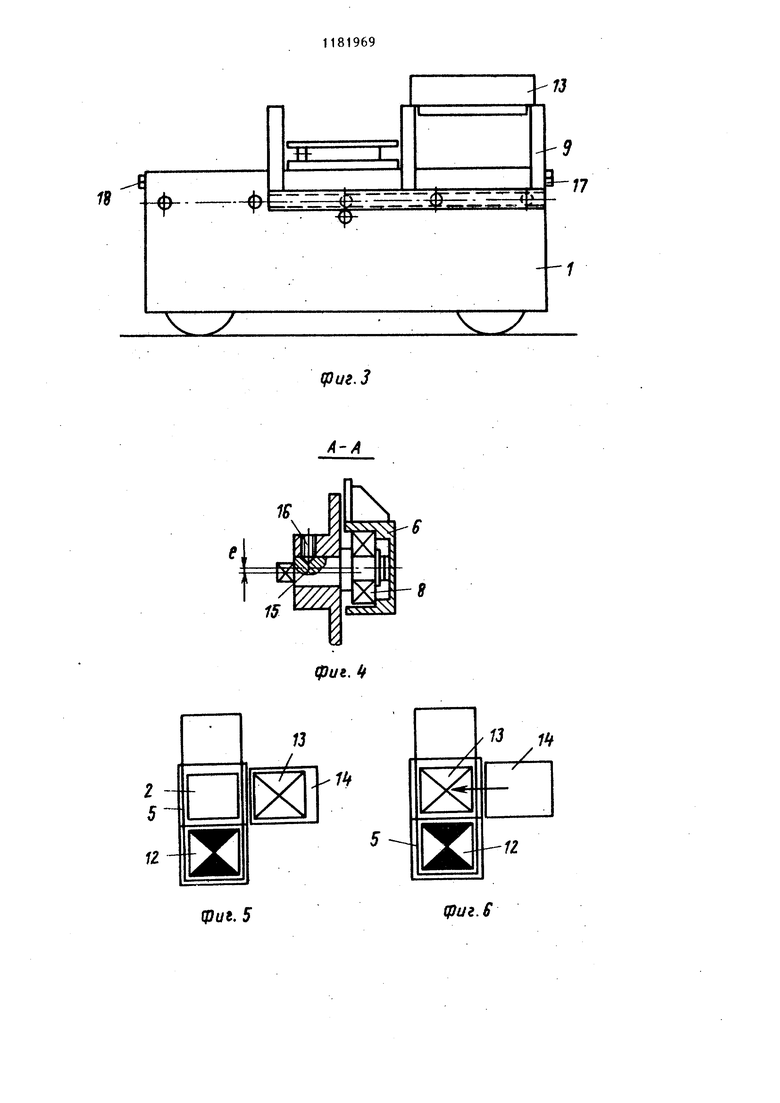
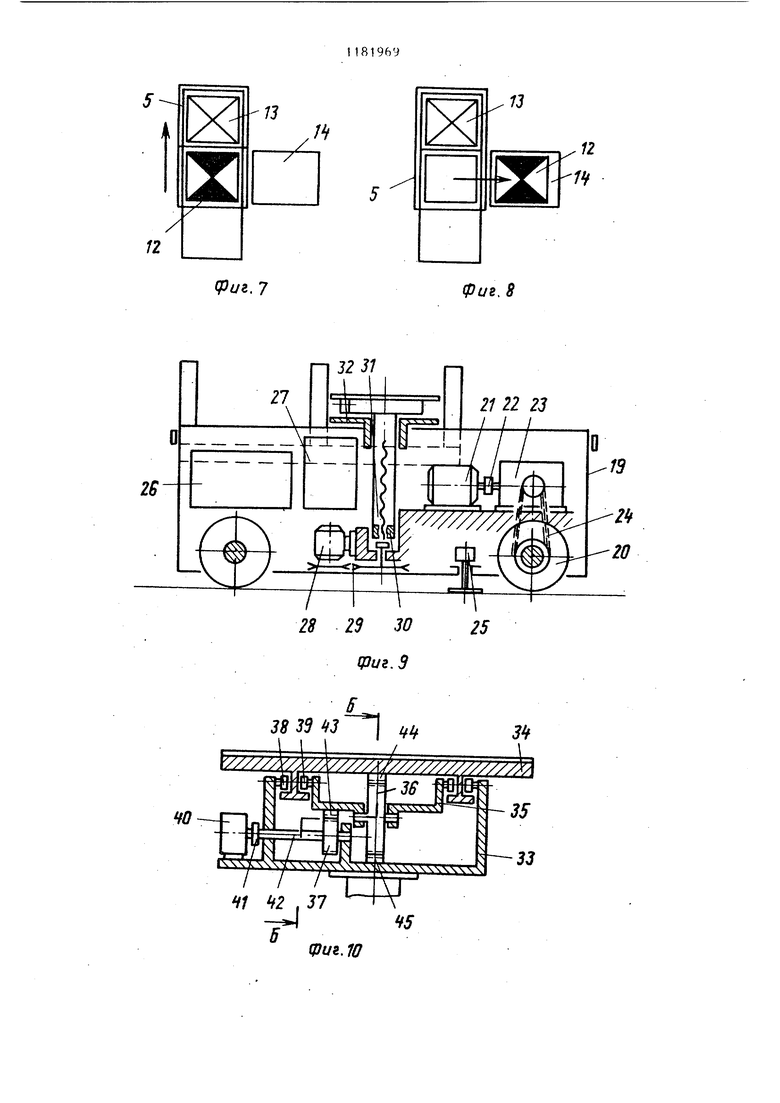
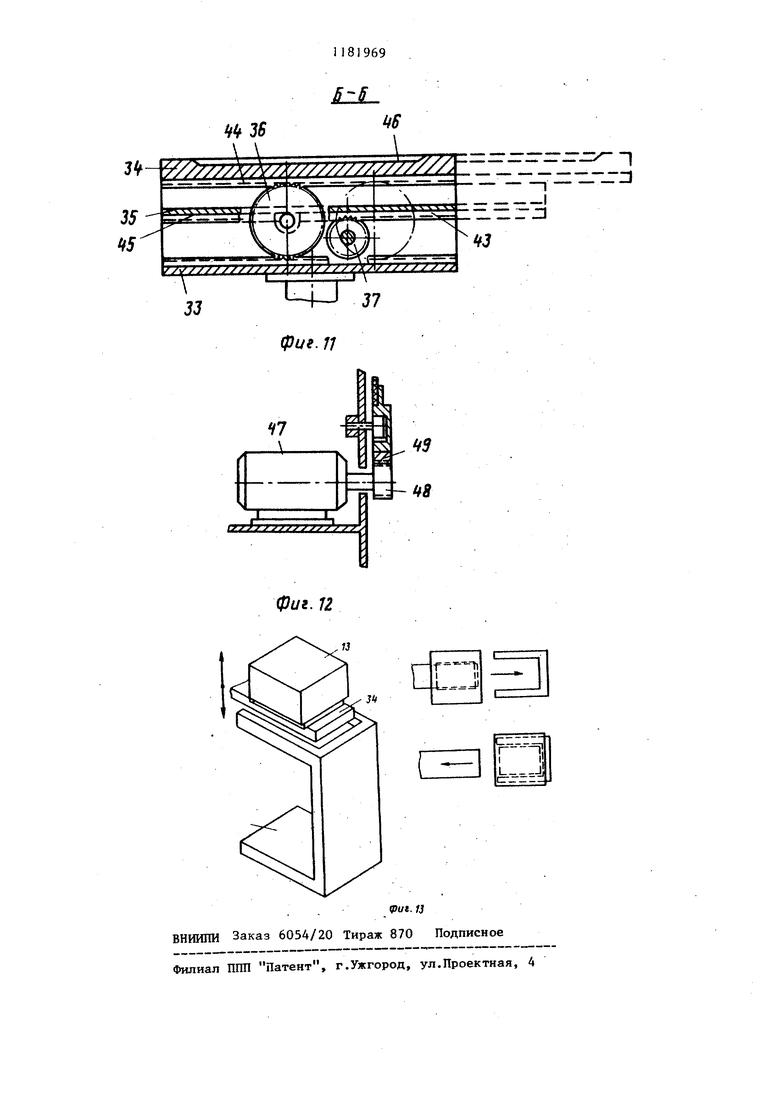
На фиг. 1 изображено перегрузочное устройство перед обменом груза у потребителя, общий вид (пунктиром показано крайнее верхнее положение грузозахвата); на фиг. 2 - взаимное расположение перегрузочного устройства и стола потребителя при обмене груза, пунктиром показано выдвинуто положение грузозахвата; на фиг. 3 положение платформы на перегрузочно устройстве после обмена груза у потребителя; на фиг. 4 - разрез А-А на фиг. 1, е - эксцентриситет оси ролика; на фиг. 5 - положение платформы с грузом относительно стола потребителя, на котором находится груз; на фиг. 6 - передача груза со стола потребителя на платформу; на фиг. 7 - положение платформы с грузами относительно стола потребителя на фиг. 8 -передача груза с платформы на стол потребителя; на фиг. 9- самоходная тележка, продольный разрез и механизм подъема.захвата ; на фиг. 1П захват, поперечный разрез ; на фиг . 11 разрез Б-Бнафиг. 10, пунктиром показано вьщвинутое положение верхней платформы захвата; на фиг. 12 реечный привод платформы; на фиг. 13 - взаимное расположение верхней платформы захвата и стола потребителя при постановке или съемке груза.
Перегрузочное ук;тройство содержит самоходную рельсовую тележку 1, на раме которой смонтирован с возможностью перемещения в горизонтальной и вертикальных плоскостях телескопический захват 2 для груза, связанный с приводами 3 и 4 его подъема и перемещения в горизонтальной плоскости. На раме тележки 1 смонтирована апатформа 5 с направляющими 6 с возможностью перемещения приводом 7 например зубчатореечным, в горизонтальной плоскости относительно захвата 2 по роликам 8, которые закреплены на раме t. На платформе 5 закреплены в поперечной плоскости три
1969. 2
П-образные стойки 9, образующие две ячейки 10 и 11 для груза, причем внутренние размеры каждой ячейки не более наружного размера груза и 5 платформы. В ячейках 10 или 11 размещается груз 12 апи 13, соответственно доставленный со склада (не показан) к приемному столу 14 потребителя, например тара с заго10 тонки или возвращаемый от потреби.. теля на склад, например тара с обработанными деталями.
Ролики 8 смонтированы на осях 15 с эксцентриком, которые зафиксированы от поворота стопорными винтами 16. Такое выполнение осей позволит устанавливать ролики на одном уровне, обеспечивая регулировку плотности перемеп1ения платформы 5. Кроме того, на раме тележки установлены упоры 17 и 18 соответственно крайнего правого и левого перемещения плат- формы.. Самоходная тележка состоит из корпуса 19, двух колесньтх пар 20, механизма передвижения тележки,, включающего в себя электродвигатель 21, муфту 22, двухскоростной редук тор 23, цепную передачу 24, а также из тормоза 25, блока питания 26,
0 например аккумуляторной батареи, и блока управления 27, обеспечивающего последовательную работу всех механизмов устройства по определенной програ(-5ме. Возможен вариант энергообеспечения и управления тележкой по подвесному и.пи напольному 1 абелю. Двухскоростной редуктор 23 обеспечивает доводочную скорость для достижения точного ориентирования
0 тележки относительно приемного стола потребителя. Механизм подъема захвата (фиг. 9) включает в себя электродвигатель 2.8, клиноременную передачу 29, винтовую пару 30, опорный стакан 31
5 и направляющую втулку 32. Захват 2 и механизм его перемещения в горизонтальной плоскости включает в себя корпус 33, верхние и нижние платформы 34 и 355 шестерни 36 и 37, подшипники
38 и 39, мотор-редуктор 40, муфту 41, вал 42 и зубчатые рейки 43, 44 и 45. Для надежного удерживания груза при вьщвижении платформы 34 предусмотрено небольшое углубление 46 (фиг. 11).
5 Привод платформы 5 включает в себя мотор-редуктор 47, шестерни 48 и зубчатую рейку 49, установленную на одной из направляющих 6- платформы.
311
Перегрузочное устройство работает следующим образом.
По сигналу от приемного стола 14 устройство доставляет потребителю со склада груз 12, причем захват 2 занимает.положение напротив стола 14 Затем захват вьщвигается приводом 4 в зону стола 14 под груз 13, а именно при вращении шестерни 37 рейка 43 и нижняя платформа 35 перемещаются, увлекая за собой шестерню 36, которая, перекатываясь по рейке 45, толкает с удвоенной скоростью рейку 44 и верхнюю платформу 34 захвата 2. Кроме того, захват 2 поднимается приводом 3 в крайнее верхнее положение, принимая на себя груз 13, подлежащий возврату на склад. Затем захват вдвигается в исходное положение и опускается в крайнее нижнее положение. При этом груз 13 зависает над захватом, располагаясь в ячейке 11.Платформа 5 перемещается приводом 7 вправо до упора 17. При этом предьщущее местоположение ячейки 11 над захватом 2 занимает ячейка Ю с приведенным грузом 12. Захват -2 поднимается в крайнее верхнее положени е, принимает на себя груз 12,
19694
выдвигается в зону стола 14 потребителя, опускается в крайнее нижнее положение, оставляя груз 12 на столе 14, затем вновь вдвигается,
5 занимая исходное положение на устройстве.
Принятый устройством груз затем доставляется на склад.
Захват груза заключается в приеме
10 груза в углубление верхней платформы 34 захвата, который происходит при подъеме платформы 35 в промежутке между опорными планками стола потребителя (фиг. 13), выполненного в
15 виде внп, или в промежутке ячейки платформы 5. Съем груза осуществляется в обратной последовательности при опускании платформы в промежутке стола потребителя или в ячейке платформы устройства. При зтом груз зависает на опорных планках.
Обмен груза на складе осуществляется в Описанной последовательности, в этом случае платформа -5 перемещается влево до упора 18. На этом полный цикл обмена груза завершается. При получении нового сигнала от потребителя весь цикл обмена груза повторяется в описанной последовательности.
Л
19
Г
S -17
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1987 |
|
SU1549649A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Автоматизированная транспортно-накопительная система | 1985 |
|
SU1306690A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Устройство для остановки рельсовой тележки | 1985 |
|
SU1261826A1 |
| Перегрузочное устройство | 1987 |
|
SU1504171A1 |
| Перегрузочное устройство | 1986 |
|
SU1402522A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Перегружатель контейнеров | 1989 |
|
SU1772057A1 |
ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО, содержащее самоходное шасси, на раме которого смонтирован с возможностью перемещения в горизонтальной и в вертикальной плоскостях захват для груза, отличающее ся тем. фиг.1 что, с целью повьппения эффективности путем уменьшения продолжительности цикла перегрузки груза, оно снабжено платформой с направляющими, смонтированной на раме с возможностью перемещения I приводом в горизонтальной плоскости относительно указанного захвата по роликам, которые закреплены на раме, и по меньшей мере тремя расположенными ч поперечной плоскости П-образными стойками, закрепленными на платформе, которыми образованы по меньшей мере две ячейки для груза, причем внутренние размеры I каждой ячейки не более наружного размера груза. (Л 00 со 0) ;о х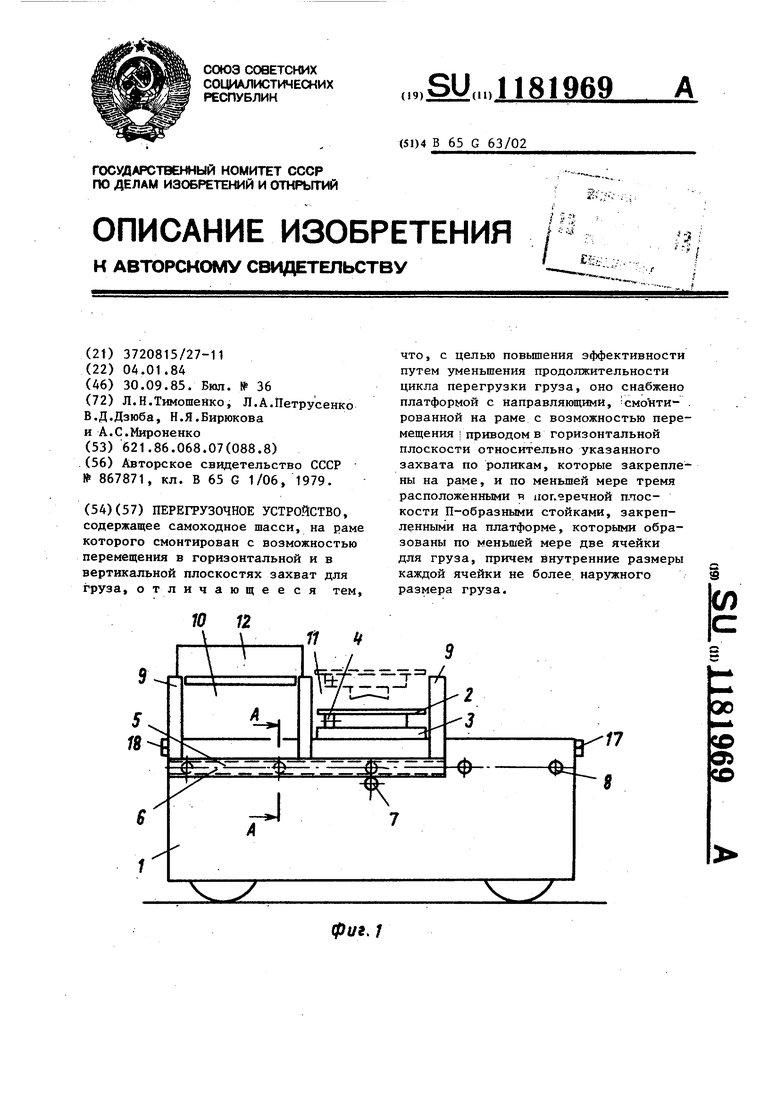
V
tpui.3
1К
фиг. 4
V у
Iff
13 itt
т
и
(руг. 5
фиг. S
7J
Ih
/
-r
CD
/
П
13
cpuz.7
Г} 32 31
38 39 3 | Iffy
фиг. 8
3ff
| Кран-штабелер для обслуживания многоярусных стеллажей | 1979 |
|
SU867871A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
